Fundamentals of RADAR
Fundamentals of RADAR
Download as ppt, pdf, or txt
At a glance
Powered by AI
The key takeaways are that radar uses radio waves to detect objects at a distance by measuring the time it takes for a pulse to travel to the target and return. It can determine both the range and bearing of targets. Factors like pulse length, beamwidth, and mounting height impact its capabilities.
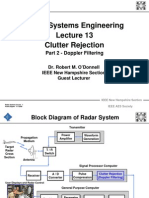
A basic pulse-modulated radar system usually includes six major components: power supply, modulator, transmitter, antenna system, receiver, and indicator.
A radar determines the range to a target by measuring the time it takes for a radio pulse to travel to the target and return. It determines bearing by the orientation of the rotating antenna when the echo is received, although bearing is less accurate than range.
You might also like
- 101+ Termux Commands List For Android 2021 (Best Ultimate GuideDocument15 pages101+ Termux Commands List For Android 2021 (Best Ultimate GuideSynxNo ratings yet
- Radar Handbook PDFDocument1,352 pagesRadar Handbook PDFAwak100% (9)
- Radar Observer's Handbook 9ed 1998 0851746667-UnlockedDocument233 pagesRadar Observer's Handbook 9ed 1998 0851746667-UnlockedМилен Долапчиев100% (1)
- Principles of Modern Radar - Volume 3Document821 pagesPrinciples of Modern Radar - Volume 3Jiawei Liu93% (15)
- Topic 4 Radar FundamentalsDocument131 pagesTopic 4 Radar FundamentalsValarmathi Selvarajoo100% (1)
- Basic Radar Principles and General CharacteristicsDocument3 pagesBasic Radar Principles and General CharacteristicsankushbhasinNo ratings yet
- Basic Radar Principles: Radio Waves Would Reflect From MetalDocument54 pagesBasic Radar Principles: Radio Waves Would Reflect From MetalMahami M ProsperNo ratings yet
- Radar Presentation 01Document30 pagesRadar Presentation 01cozdim100% (5)
- Chapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingDocument37 pagesChapter 1: Introduction: The Name Radar Stands For Radio Detection and Rangingrajeev100% (1)
- RadarDocument17 pagesRadarAnindya Mukul100% (3)
- Basic Theory and Operation of A Marine RadarDocument25 pagesBasic Theory and Operation of A Marine RadarLeonila Calumpag100% (1)
- Principles of RadarDocument29 pagesPrinciples of Radarcostinos100% (1)
- EEE381B Aerospace Systems & Avionics: RadarDocument49 pagesEEE381B Aerospace Systems & Avionics: RadardegabbzsNo ratings yet
- Radar Block DiagramDocument190 pagesRadar Block DiagramRamprabu ChandrasekarNo ratings yet
- Radar TutorialDocument11 pagesRadar TutorialVinay ChahalNo ratings yet
- RadarDocument40 pagesRadar.cheng.100% (1)
- Radar Training System - Instructor GuideDocument212 pagesRadar Training System - Instructor GuideJeenath aman100% (1)
- Satellite NavigationDocument30 pagesSatellite Navigationzakiannuar100% (2)
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Introduction To Radar (3590) PDFDocument108 pagesIntroduction To Radar (3590) PDFChandan MishraNo ratings yet
- 13 - Electronic NavigationDocument19 pages13 - Electronic NavigationAKANKSHA PANDEYNo ratings yet
- RADARDocument22 pagesRADARRadyl Ced Adorforme100% (3)
- How Marine Radar WorksDocument65 pagesHow Marine Radar WorksRohit Kakade100% (4)
- Ec1019-Radar and Navigational AidsDocument16 pagesEc1019-Radar and Navigational Aidsainugiri100% (2)
- Navigational Aids Including Compasses: Radar PlottingDocument169 pagesNavigational Aids Including Compasses: Radar PlottingAnkit MauryaNo ratings yet
- Deck Watchkeeping - Performing WatchDocument20 pagesDeck Watchkeeping - Performing Watchneo mialaNo ratings yet
- Exam 2016 RadarDocument13 pagesExam 2016 Radaradib50% (2)
- Radar SystemsDocument108 pagesRadar Systemssunanda100% (1)
- Hyperbolic Navigation System: Buenaventura, Jazzen G. Ruiz, Muel Fred L. Sabido, Alvin TDocument40 pagesHyperbolic Navigation System: Buenaventura, Jazzen G. Ruiz, Muel Fred L. Sabido, Alvin TNancy Cutin100% (1)
- Radar Workbook 2013Document88 pagesRadar Workbook 2013sergiuserbanNo ratings yet
- 2-7 The Marine RadarDocument11 pages2-7 The Marine Radarmingo622100% (1)
- Air Defence RadarDocument77 pagesAir Defence RadarFuadMasrur100% (1)
- Rs Notes Pdf1Document248 pagesRs Notes Pdf1himeshemraan100% (1)
- The Magnetic Compass CardDocument141 pagesThe Magnetic Compass Cardutkarshgahtori50% (4)
- Radar PlottingDocument43 pagesRadar PlottingPanagiwtis M.No ratings yet
- Navigational AidsDocument171 pagesNavigational AidsKairos100% (3)
- Good 5989-7575en - Radar MeasurementsDocument88 pagesGood 5989-7575en - Radar MeasurementspablocotanNo ratings yet
- Radar Beacons: Racon Technical CharacteristicsDocument5 pagesRadar Beacons: Racon Technical CharacteristicshutsonianpNo ratings yet
- Unit-5 RADARs PptsDocument146 pagesUnit-5 RADARs PptsRam KalvaNo ratings yet
- Marine RadarDocument15 pagesMarine RadarMahami M Prosper100% (1)
- RADAR Notes PDFDocument115 pagesRADAR Notes PDFVamshi Krishna100% (2)
- Radar BasicsDocument10 pagesRadar BasicsSteve AbonyiNo ratings yet
- Radar Clutter Rejection Doppler FilteringDocument67 pagesRadar Clutter Rejection Doppler FilteringneilwuNo ratings yet
- Maritime Domain Awareness: HF-Radar ComponentDocument40 pagesMaritime Domain Awareness: HF-Radar ComponentRUCOOLNo ratings yet
- Navigational AidsDocument14 pagesNavigational AidsArgel Linard Francisco MabagaNo ratings yet
- Navigation QuestionsDocument141 pagesNavigation QuestionsArman Pineda100% (2)
- Guidelines For Marine OfficersDocument27 pagesGuidelines For Marine Officerspaulo henriqueNo ratings yet
- Microwave FMCW RadarDocument48 pagesMicrowave FMCW RadarPranabKumarGoswami100% (2)
- Synopsis: Elt: (Instructor: Vinay Singh, Email:, Mo: 08108304735)Document5 pagesSynopsis: Elt: (Instructor: Vinay Singh, Email:, Mo: 08108304735)vinayNo ratings yet
- Magnetic CompassDocument4 pagesMagnetic Compassdhaneshbhor100% (1)
- Radar - Arpa: Pablo, Marco I. Odonio, Ean Penamante, JerzonDocument16 pagesRadar - Arpa: Pablo, Marco I. Odonio, Ean Penamante, JerzonAdrian Neil Pablo100% (2)
- Radar Systems NotesDocument457 pagesRadar Systems NotesMridula Mittal Bansal100% (2)
- Celestial InterceptDocument29 pagesCelestial IntercepttejmayerNo ratings yet
- B.,Eqpmnt Sem V-23Document299 pagesB.,Eqpmnt Sem V-23PrasathNo ratings yet
- History of Radar-Rawinfo-07Document54 pagesHistory of Radar-Rawinfo-07fawad RehmanNo ratings yet
- Radar: Basic Principle-Radar Is ADocument5 pagesRadar: Basic Principle-Radar Is AkdchourasiaNo ratings yet
- Radar NotesDocument33 pagesRadar Notesrica_esclada100% (1)
- Bridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VDocument48 pagesBridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VMayankNo ratings yet
- Bài tập về nguyên lý cơ bản radar (1)Document8 pagesBài tập về nguyên lý cơ bản radar (1)nguyenhoanganh181005No ratings yet
- Surveillance Systems Course OutlineDocument36 pagesSurveillance Systems Course OutlinemogenoordiinNo ratings yet
- RadarDocument10 pagesRadarNiranjan ReddyNo ratings yet
- PT32 12Document3 pagesPT32 12sergiuserbanNo ratings yet
- Wilson-Haffenden Front MatterDocument12 pagesWilson-Haffenden Front MattersergiuserbanNo ratings yet
- Marine Radar PDFDocument60 pagesMarine Radar PDFMarijaŽaperNo ratings yet
- Electronic Nav AidsDocument2 pagesElectronic Nav Aidssergiuserban100% (1)
- Ship NavigationDocument16 pagesShip NavigationMarac3141No ratings yet
- Radar Fundamentals Power Point PresentationDocument51 pagesRadar Fundamentals Power Point PresentationVIKALP KULSHRESTHA100% (3)
- Radar Workbook 2013Document88 pagesRadar Workbook 2013sergiuserbanNo ratings yet
- Barcoding InformaticsDocument10 pagesBarcoding Informaticsapi-650274498No ratings yet
- 202440503315FF BekweleDocument1 page202440503315FF BekwelechidugambekweleNo ratings yet
- 2017-01 ALEXAMini Sample Footage Technical InformationDocument5 pages2017-01 ALEXAMini Sample Footage Technical InformationAlexandreNo ratings yet
- OSD Assignment 1 - FinalDocument9 pagesOSD Assignment 1 - FinalDipali PatilNo ratings yet
- Formulir Checklist Pemeriksaan Mobile CraneDocument7 pagesFormulir Checklist Pemeriksaan Mobile CraneEdwin RajagukgukNo ratings yet
- Assessment and Durability of StructureDocument10 pagesAssessment and Durability of StructureKrishnendra ShuklaNo ratings yet
- High Voltage Engineering (ETD 19) - Electrotechnical Division-Public Safety Standards of IndiaDocument2 pagesHigh Voltage Engineering (ETD 19) - Electrotechnical Division-Public Safety Standards of IndiamaninderpreetNo ratings yet
- HVDCDocument1 pageHVDCsmitajanaNo ratings yet
- Web Questions UnansweredDocument13 pagesWeb Questions UnanswereddreamsftNo ratings yet
- BGP Flowspec Conceptual ArchitectureDocument26 pagesBGP Flowspec Conceptual ArchitecturemorpheusnaakNo ratings yet
- About AnkobsDocument38 pagesAbout Ankobsapi-146440457No ratings yet
- MNV24 - List of Exhibitors - 12 MARCHDocument3 pagesMNV24 - List of Exhibitors - 12 MARCHVenus SoongNo ratings yet
- 3g Prepaid Mobile InternetDocument7 pages3g Prepaid Mobile InternetMd Amir HossainNo ratings yet
- Big Data English SunuDocument23 pagesBig Data English SunuhsNo ratings yet
- Game Devlopment SynopsisDocument6 pagesGame Devlopment SynopsisAditya SaknureNo ratings yet
- Sony SRF s84 Radio 14Document14 pagesSony SRF s84 Radio 14pindurs1No ratings yet
- Щербина Д.В. ДЗ 22.11Document4 pagesЩербина Д.В. ДЗ 22.11tomeji7839No ratings yet
- Easer-C NewDocument15 pagesEaser-C Newapi-538691317No ratings yet
- Medini (23240)Document4 pagesMedini (23240)rimjhimsagar2476No ratings yet
- Hitachi ABB Power Grids in Brilon - Transformer Factory Celebrates Its 100th AnniversaryDocument1 pageHitachi ABB Power Grids in Brilon - Transformer Factory Celebrates Its 100th AnniversarychipulinoNo ratings yet
- Is There Any Function Module To Download PDF File - SAP Q&ADocument4 pagesIs There Any Function Module To Download PDF File - SAP Q&Aphogat projectNo ratings yet
- Acc GEA InformationDocument148 pagesAcc GEA InformationjoncperezNo ratings yet
- EMBEDDED SYSTEM LAB TRAINER Instruction ManualDocument27 pagesEMBEDDED SYSTEM LAB TRAINER Instruction ManualyogeshNo ratings yet
- System Sensor SA Ceiling Strobes and Horn Strobes ManualDocument4 pagesSystem Sensor SA Ceiling Strobes and Horn Strobes ManualtomNo ratings yet
- Ae-T100B: Available VersionsDocument2 pagesAe-T100B: Available Versionsjafar rahman niaNo ratings yet
- New IP Prep SyllabusVer4.0 Supplement UnlockedDocument60 pagesNew IP Prep SyllabusVer4.0 Supplement UnlockedYe Myo Kyaw100% (1)
- ClippersDocument16 pagesClippersvaisamNo ratings yet
- Gis Tools - AsfDocument2 pagesGis Tools - AsfSeverodvinsk MasterskayaNo ratings yet
- New Met-Online Api RP 571 Damage Mechanisms: Matthews Training LTDDocument2 pagesNew Met-Online Api RP 571 Damage Mechanisms: Matthews Training LTDBashu PoudelNo ratings yet