LAB1 Mecánica de Sólidos PDF
LAB1 Mecánica de Sólidos PDF
Descargar como pdf o txt
También podría gustarte
- Administración Hardware de un Sistema Informático (MF0484_3)De EverandAdministración Hardware de un Sistema Informático (MF0484_3)Aún no hay calificaciones
- ATS Instalacion de PostesDocumento4 páginasATS Instalacion de PostesSstplanta Coscorron100% (1)
- Jeison ManchegoDocumento2 páginasJeison ManchegoEmerson EQAún no hay calificaciones
- Ats 04Documento2 páginasAts 04Cristhian PachecoAún no hay calificaciones
- Formato de AtsDocumento8 páginasFormato de AtspaulAún no hay calificaciones
- Informe Proceso TigDocumento23 páginasInforme Proceso TigYen Fisher0% (1)
- ATS PretrologiaDocumento1 páginaATS PretrologiaFernando GonzalesAún no hay calificaciones
- Registro - ATS MECANICADocumento2 páginasRegistro - ATS MECANICAJosue Israel Rosales LeyvaAún no hay calificaciones
- Laboratorio 1 Seguridad y Reconocimiento Del EsmerilDocumento8 páginasLaboratorio 1 Seguridad y Reconocimiento Del EsmerilAdailton Umasi PilaAún no hay calificaciones
- Seguridad en El TornoDocumento13 páginasSeguridad en El TornoAdailton Umasi Pila0% (1)
- Ast Lab 1Documento1 páginaAst Lab 1Ismael Joaquin Maguina TincoAún no hay calificaciones
- Análisis de Seguridad de La Tarea (Ast) : Mediciones Con Dispositivos RLC Zapatos de Seguridad. Aula 710Documento6 páginasAnálisis de Seguridad de La Tarea (Ast) : Mediciones Con Dispositivos RLC Zapatos de Seguridad. Aula 710David MontescoAún no hay calificaciones
- Formato #1 AtsDocumento4 páginasFormato #1 AtsTerry gutierresAún no hay calificaciones
- AST - Formato Ejemplo - Mando Variador - ASTDocumento1 páginaAST - Formato Ejemplo - Mando Variador - ASTKenghi Felix Jimenez ParragaAún no hay calificaciones
- 5 - Solo en Caso de Trabajos de Alto Riesgo (Ats)Documento1 página5 - Solo en Caso de Trabajos de Alto Riesgo (Ats)JORGE TPAún no hay calificaciones
- Ats DurezaDocumento4 páginasAts DurezaFranco MendozaAún no hay calificaciones
- MCS-SER-PETS-006 Movimiento de Bomba Con TelehandlerDocumento7 páginasMCS-SER-PETS-006 Movimiento de Bomba Con TelehandlerLuisín Armando León CóndorAún no hay calificaciones
- Modulo Mater 8Documento1 páginaModulo Mater 8hugoAún no hay calificaciones
- Ast Lab 1Documento6 páginasAst Lab 1Ismael Joaquin Maguina TincoAún no hay calificaciones
- Taller 2 Tablero de Compresor Estático 1Documento12 páginasTaller 2 Tablero de Compresor Estático 1Andres IceAún no hay calificaciones
- Fmj-sst-r07 - Analisis de Trabajo Seguro (Ats)Documento3 páginasFmj-sst-r07 - Analisis de Trabajo Seguro (Ats)Jholbert Lopez BeltranAún no hay calificaciones
- Laboratorio 1 - Diodo SemiconductorDocumento15 páginasLaboratorio 1 - Diodo SemiconductorGabriel Rene Vega EspinozaAún no hay calificaciones
- Ats - Saneamiento BasicoDocumento1 páginaAts - Saneamiento BasicoBrahyan AznaranAún no hay calificaciones
- Adecc-Pets-Logueo-05-Carguio, Traslado y Archivamiento de Cajas Porta Testigos V.08Documento7 páginasAdecc-Pets-Logueo-05-Carguio, Traslado y Archivamiento de Cajas Porta Testigos V.08franknavarror12Aún no hay calificaciones
- Ats TecsupDocumento1 páginaAts TecsupJose Luis Apaza MachacaAún no hay calificaciones
- Fmj-sst-r07 - Analisis de Trabajo Seguro (Ats)Documento11 páginasFmj-sst-r07 - Analisis de Trabajo Seguro (Ats)Jholbert Lopez BeltranAún no hay calificaciones
- Formato de Ats AgalpampaDocumento5 páginasFormato de Ats AgalpampaSteffy ZavalaAún no hay calificaciones
- Ast 1Documento6 páginasAst 1Jhoymer García ArteagaAún no hay calificaciones
- 06 PE-SSOMA-PETS-00004 - Demolición de Losa de Concreto - REV0Documento6 páginas06 PE-SSOMA-PETS-00004 - Demolición de Losa de Concreto - REV0rodolfo berrio carrascoAún no hay calificaciones
- 05 PE-SSOMA-PETS-00003 - Montaje y Desmontaje de Extractor de Gases - REV0Documento6 páginas05 PE-SSOMA-PETS-00003 - Montaje y Desmontaje de Extractor de Gases - REV0rodolfo berrio carrascoAún no hay calificaciones
- Control de Procesos Laboratorio #09 "Transmisores de Presión"Documento13 páginasControl de Procesos Laboratorio #09 "Transmisores de Presión"Delia Azumi LlanllayaAún no hay calificaciones
- Laboratorio 09 Transmisores de PresiónDocumento15 páginasLaboratorio 09 Transmisores de PresiónroxanaAún no hay calificaciones
- Formato de ART CASONADocumento2 páginasFormato de ART CASONAmanuelAún no hay calificaciones
- SGSST-FR-17 - AtsDocumento2 páginasSGSST-FR-17 - AtsjorddydtAún no hay calificaciones
- Trabajo AtsDocumento10 páginasTrabajo AtsLenon Quispesivana ȻhAún no hay calificaciones
- 4.permiso de AlturasDocumento2 páginas4.permiso de AlturasSarmiento YuyuAún no hay calificaciones
- Puesto de WincheroDocumento1 páginaPuesto de WincheroAlditho PomatayAún no hay calificaciones
- Formato ATS-1Documento1 páginaFormato ATS-1Gianpier Anthony HuertaAún no hay calificaciones
- Ats-Tecsup Laboratorio #3Documento1 páginaAts-Tecsup Laboratorio #3robertpqvAún no hay calificaciones
- Análisis de Trabajo Seguro (Ats) : Dario Frias SerrutoDocumento3 páginasAnálisis de Trabajo Seguro (Ats) : Dario Frias SerrutoLuis Manuel Chirinos CosiAún no hay calificaciones
- AST - Formato Taller - 02 Instalación Eléctrica Semivisible-1Documento1 páginaAST - Formato Taller - 02 Instalación Eléctrica Semivisible-1JamecoAún no hay calificaciones
- Ast Formato Bien A4Documento3 páginasAst Formato Bien A4RAVAL SAC SOLUCIONES EN SEGURIDAD Y MEDIO AMBIENTEAún no hay calificaciones
- 08 PE-SSOMA-PETS-00006 - Armado de Malla de Acero - REV0Documento6 páginas08 PE-SSOMA-PETS-00006 - Armado de Malla de Acero - REV0rodolfo berrio carrascoAún no hay calificaciones
- Laboratorio 14 Sensores de Peso y FuerzaDocumento15 páginasLaboratorio 14 Sensores de Peso y Fuerzarichard bryam chuctaya dezaAún no hay calificaciones
- Formato - ATS - Grupo 3 (08Documento2 páginasFormato - ATS - Grupo 3 (08Karina Mercedes Nunura MoreAún no hay calificaciones
- AST - Formato Taller - 02 Instalación Eléctrica Semivisible-1Documento6 páginasAST - Formato Taller - 02 Instalación Eléctrica Semivisible-1josue flores mendozaAún no hay calificaciones
- 2 Formato - ATS (Analisis de Trabajo Seguro) - 1Documento1 página2 Formato - ATS (Analisis de Trabajo Seguro) - 1Jesus Delgado100% (1)
- 10 PE-SSOMA-PETS-00008 - Colocación de Concreto Con Trompo Mezclador - REV0Documento6 páginas10 PE-SSOMA-PETS-00008 - Colocación de Concreto Con Trompo Mezclador - REV0rodolfo berrio carrascoAún no hay calificaciones
- Ast PLCDocumento6 páginasAst PLCiChelseaAún no hay calificaciones
- Dj-Pr-Pets-011 Esmerilado de Superficies MetalicasDocumento3 páginasDj-Pr-Pets-011 Esmerilado de Superficies MetalicasJean Carlos Avelino RomualdoAún no hay calificaciones
- Ats JraDocumento15 páginasAts JrajczeladaAún no hay calificaciones
- 09 PE-SSOMA-PETS-00007 - Encofrado y Desencofrado Con Madera - REV0Documento6 páginas09 PE-SSOMA-PETS-00007 - Encofrado y Desencofrado Con Madera - REV0rodolfo berrio carrascoAún no hay calificaciones
- Colocado de Solera y Parrilla 2007Documento1 páginaColocado de Solera y Parrilla 2007Roxana Cueva VenturaAún no hay calificaciones
- Laboratorio 09 Transmisores de PresiónDocumento21 páginasLaboratorio 09 Transmisores de PresiónAndres Ice100% (1)
- Ats - Colocacn CimbraDocumento1 páginaAts - Colocacn CimbraDarsy Arnao AmaroAún no hay calificaciones
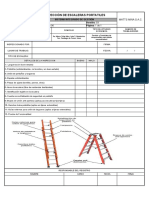
- Foi-Pta-06 Formato de Inspección de EscalerasDocumento1 páginaFoi-Pta-06 Formato de Inspección de EscalerasAndre DlcAún no hay calificaciones
- 29.01.23 Pase de Guardia PediatríaDocumento5 páginas29.01.23 Pase de Guardia PediatríaCarolina La MarAún no hay calificaciones
- For 02-AtsDocumento2 páginasFor 02-AtsYasmin D. RodriguezAún no hay calificaciones
- Administración Hardware de un Sistema Informático (MF0484_3)De EverandAdministración Hardware de un Sistema Informático (MF0484_3)Aún no hay calificaciones
- Sistemas Operativos y Aplicaciones Informáticas (MF0223_3)De EverandSistemas Operativos y Aplicaciones Informáticas (MF0223_3)Aún no hay calificaciones
- Ejercixes FADocumento2 páginasEjercixes FAralfAún no hay calificaciones
- Guia de Electricidad Completa - 2016Documento7 páginasGuia de Electricidad Completa - 2016Leonardo AcostaAún no hay calificaciones
- Iniciación A La Electrónica PDFDocumento342 páginasIniciación A La Electrónica PDFviajerocanario80% (5)
- Cartilla Marco Quispe Movimiento Rectilíneo UniformeDocumento8 páginasCartilla Marco Quispe Movimiento Rectilíneo UniformebismarAún no hay calificaciones
- Regresión Lineal Múltiple - RLMDocumento14 páginasRegresión Lineal Múltiple - RLMYober Arteaga IreneAún no hay calificaciones
- Guía Matemática VectoresDocumento10 páginasGuía Matemática VectoresEdgar Rodriguez MartinezAún no hay calificaciones
- Tema 2. Cinemática Del Sólido RígidoDocumento53 páginasTema 2. Cinemática Del Sólido RígidoAustinAún no hay calificaciones
- 4CJGZEPEDADocumento8 páginas4CJGZEPEDAMabel BarragánAún no hay calificaciones
- El Teorema Del Transporte de ReynoldsDocumento24 páginasEl Teorema Del Transporte de ReynoldsAdemar Rodriguez D.Aún no hay calificaciones
- Material Paneles PDFDocumento28 páginasMaterial Paneles PDFAlexander ZambranoAún no hay calificaciones
- Taller 1 S7Documento2 páginasTaller 1 S7San Maycol FielAún no hay calificaciones
- Solución Parcial Grupo 03 - 2021Documento4 páginasSolución Parcial Grupo 03 - 2021SOFIA GONZALEZ100% (1)
- Calculii 11Documento336 páginasCalculii 11IosmarVAún no hay calificaciones
- 1 Secuencia Didactica Física 2-22Documento13 páginas1 Secuencia Didactica Física 2-22Monica Alejandrina Calan PereraAún no hay calificaciones
- Fisica BachilleratoDocumento10 páginasFisica BachilleratoAngie SalazarAún no hay calificaciones
- Física Guía 2 VectoresDocumento5 páginasFísica Guía 2 VectoresMario ValenzuelaAún no hay calificaciones
- Entrenamiento de Carga VectorialDocumento19 páginasEntrenamiento de Carga Vectorialleonel sanchezAún no hay calificaciones
- S15.s2-Integrales de Línea Sobre Campos VectorialesDocumento19 páginasS15.s2-Integrales de Línea Sobre Campos VectorialesJostin Adair Aguirre CastilloAún no hay calificaciones
- La Física en El BalletDocumento9 páginasLa Física en El BalletXimena TorresAún no hay calificaciones
- Ejercicios Del Obj6 MatIII 733Documento23 páginasEjercicios Del Obj6 MatIII 733Josel RlAún no hay calificaciones
- Ejercicios para ResolverDocumento2 páginasEjercicios para Resolverjuan carlosAún no hay calificaciones
- Clase Momento de Una FuerzaDocumento19 páginasClase Momento de Una FuerzaFrancisco Javier Martinez HenriquezAún no hay calificaciones
- Hoja de Trabajo 02 - VectoresDocumento5 páginasHoja de Trabajo 02 - VectoresAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Fisica. Modulo Ii.Documento51 páginasFisica. Modulo Ii.Rixis AlexanderAún no hay calificaciones
- Guia Primer Parcial Fisica 2021 Ingenieria....Documento46 páginasGuia Primer Parcial Fisica 2021 Ingenieria....federicoAún no hay calificaciones
- Final Fsisca 2Documento108 páginasFinal Fsisca 2MicklouAlbeldaAún no hay calificaciones
- Preinforme 1 666Documento4 páginasPreinforme 1 666Michel MerchanAún no hay calificaciones
- 16 Analisis VectorialDocumento2 páginas16 Analisis Vectorialluis rondonAún no hay calificaciones
- Ampliación Física - y - Química - 4eso - 2012 - 2013.Documento26 páginasAmpliación Física - y - Química - 4eso - 2012 - 2013.beatrizjm9314Aún no hay calificaciones
- TC Tarea 4 129 100413A 474.Documento46 páginasTC Tarea 4 129 100413A 474.john morenoAún no hay calificaciones