Este documento describe un experimento para determinar la curva de magnetización de una dinamo compuesta. Explica los tipos de dinamos compuestas, el circuito experimental, y los pasos para medir la tensión generada a diferentes corrientes de campo mientras se mantiene constante la velocidad. Presenta tablas de datos y gráficas de las curvas de magnetización ascendente, descendente y promedio. El objetivo es conocer el comportamiento de una dinamo compuesta y compararlo con una dinamo de derivación.
0 calificaciones0% encontró este documento útil (0 votos)
42 vistas9 páginas
Este documento describe un experimento para determinar la curva de magnetización de una dinamo compuesta. Explica los tipos de dinamos compuestas, el circuito experimental, y los pasos para medir la tensión generada a diferentes corrientes de campo mientras se mantiene constante la velocidad. Presenta tablas de datos y gráficas de las curvas de magnetización ascendente, descendente y promedio. El objetivo es conocer el comportamiento de una dinamo compuesta y compararlo con una dinamo de derivación.
Este documento describe un experimento para determinar la curva de magnetización de una dinamo compuesta. Explica los tipos de dinamos compuestas, el circuito experimental, y los pasos para medir la tensión generada a diferentes corrientes de campo mientras se mantiene constante la velocidad. Presenta tablas de datos y gráficas de las curvas de magnetización ascendente, descendente y promedio. El objetivo es conocer el comportamiento de una dinamo compuesta y compararlo con una dinamo de derivación.
Este documento describe un experimento para determinar la curva de magnetización de una dinamo compuesta. Explica los tipos de dinamos compuestas, el circuito experimental, y los pasos para medir la tensión generada a diferentes corrientes de campo mientras se mantiene constante la velocidad. Presenta tablas de datos y gráficas de las curvas de magnetización ascendente, descendente y promedio. El objetivo es conocer el comportamiento de una dinamo compuesta y compararlo con una dinamo de derivación.
Descargue como DOCX, PDF, TXT o lea en línea desde Scribd
Descargar como docx, pdf o txt
Está en la página 1/ 9
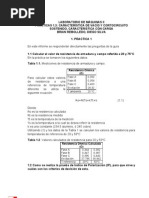
CARACTERISTICAS DE MAGNETIZACION DE DINAMOS COMPUESTOS
1. OBJETIVOS
Los objetivos del presente laboratorio son:
Conocer los tipos de dinamos compuestos.
Conocer el circuito de instalación para el laboratorio.
Realizar la curva de magnetización de la dinamo compuesto.
2. MARCO TEORICO
La dinamo compuesto, se caracteriza por tener arrollamiento paralelo (shunt) y serie.
Usualmente los arrollamientos de campo, ósea del devanado del inducido, se conectan de modo que el arrollamiento serie coadyuve con el arrollamiento paralelo (shunt), es decir, de modo que las fuerzas magneto motrices se sumen. Cuando está conectada de esta, manera se dice que la, maquina es una dinamo compuesta acumulativa (integral o aditiva). La máquina en que el arrollamiento de campo serie se opone al arrollamiento paralelo se llama dinamo compuesto deferencial o sustractiva.
En la dinamo compuesto acumulativa (integral o aditiva) la función principal la realiza el
arrollamiento en paralelo, mientras que el arrollamiento serie está destinado a compensar la fuerza magneto motriz de la reacción del inducido y la caída de tensión en el circuito del inducido para una determinada carga.
En los siguientes gráficos, se muestran las dinamos compuestos:
2.1. DINAMO COMPUESTO ACUMULATIVA (INTEGRAL O ADITIVO)
Fig. 2.1 La fuerza magnetomotriz (fem) inducida, tiene la siguiente relacion:
E=Kϕω E=K (ϕ d +ϕ s) ω
1 2.2. DINAMO COMPUESTO DIFERENCIAL O SUSTRACTIVA
Fig. 2.2
La fuerza magnetomotriz (fem) inducida, tiene la siguiente relacion:
E=Kϕω E=K (ϕ d−ϕs )ω
La curva de magnetización para una dinamo en derivación o paralelo (laboratorio 2), y
para una dinamo compuesto o integral aditivo, se la puede realizar de la siguiente manera:
Fig. 2.3
3. MATERIALES Y EQUIPOS PRINCIPALES A UTILIZAR
Para el presente laboratorio, se utilizara el siguiente equipo, instrumental y material:
Una dinamo con autoexcitación compuesto acumulativa, que tiene las siguientes características.
2 Dinamo Motoren Fabrik Hamburg
Tensión nominal V n=230 [ V ]
Corriente nominal I n=19,6 [ A ] Velocidad nominal ω n=1430 [ rpm ] Potencia nominal Pn=4,5 [ Kw ]
Fig. 3.1
Una maquina motriz.
Maquina motriz
SIEMENS SCHUCKERT
R65 5+4
220 / 380 [V] Δ 20,4 / 11,8
Υ [A]
5,7 [kW] 0,84 Cos φ
1410 r.p.m. 50 [Hz]
105 [V] 31,5 [A]
Fig. 3.2
Instrumentos de medición: Voltímetros, amperímetros.
3 Tacómetro. Marca: Hand Tacho Serie No: 714672Ce. Tipo: Digital U/min: 3 – 99,999 M/min: 0,3 – 9999,9 Distancia: 25- 1.000mm
Fig. 3.4
Cables para conexión.
Cables tipo Banana.
Con Tenaza de derivación.
Fig. 3.5
4. CIRCUITO PARA EL LABORATORIO
Fig. 4.1 Circuito del laboratorio
4 5. DESCRIPCION DEL LABORATORIO
Realizar el circuito de laboratorio, como se indica en el punto 4.
Utilizando la maquina motriz, accionar la dinamo hasta llegar a la velocidad
nominal.
No debe circular corriente por el circuito de campo (C-D), o sea estando el circuito de campo abierto donde se debe registrar la primera medición.
Habilitar el circuito de campo, para que circule en él un valor bajo de corriente de
campo, registrando los valores de tensión y corriente, llegando en forma paulatina a un valor elevado de corriente y voltaje (tomando en cuenta las características de corriente y voltaje nominal de la dinamo).
Ya alcanzado un valor elevado de la tensión generada, se reduce sucesivamente la
corriente de campo registrándose valores de tensión generada para cada modificación de la corriente de campo hasta llegar a corriente de campo cero, constituyendo la última medición en laboratorio.
Cabe indicar en las variaciones de corriente de campo, debe mantenerse la
velocidad de la maquina constante. Si el ensayo se realiza a distinta velocidad, será necesario modificar los valores de tensión generada por la dinamo, con la siguiente relación.
8. CONCLUSIONES -En la industria eléctrica cuando es conveniente utilizar una maquina de potencia en CC con la conexión paralelo y cuando con la conexión compuesta o mixta (semiparalelo)?
MOTOR EN PARALELO
El motor en paralelo es diferente del motor de serie ya que el devanado inductor está conectado en paralelo con la armadura. Puesto que el devanado inductor se conecta en paralelo al devanado del inducido, a este tipo de máquinas se le conoce como motor con excitación en paralelo, o simplemente motor paralelo. Un motor en paralelo o en derivación tiene características diferentes en construcción al motor serie, ya que la bobina de campo en derivación está devanada con alambre de calibre delgado y muchas vueltas para generar un campo lo suficientemente fuerte para mantener la velocidad de esta máquina prácticamente constante. Esto significa que el motor tiene un par de arranque menor que el motor serie, pero es más estable con respecto a su velocidad de operación. Es conveniente utilizarlo en aplicaciones de velocidad constante, como en los accionamientos de corriente continua en los grupos motogeneradores de corriente continua
8 MOTOR COMPUESTO
Un motor compuesto combina las características de los motores serie y paralelo, ya que esta máquina tiene un devanado de campo serie y un devanado de campo paralelo. Dependiendo de la conexión de estos devanados, estas máquinas pueden clasificarse como: motor compuesto largo o motor compuesto corto, y éstas a su vez pueden ser aditivas o sustractivas. Cuando el devanado de campo serie se conecta en serie con la armadura se conoce como motor compuesto largo, cuando el devanado de campo serie se conecta en serie con la línea se le conoce como motor compuesto corto. Dependiendo de las marcas de la polaridad de las bobinas de excitación serie y paralelo, se clasifican como aditivas y sustractivas. Si la dirección de las corrientes en las bobinas serie y paralelo entran o salen por las marcas de polaridad a esta máquina se le conoce como motor compuesto (largo o corto) aditivo, si la corriente en uno de los devanados entra por el signo de polaridad y en el otro devanado el sentido de la corriente sale por el signo de polaridad al motor se le conoce como motor compuesto (largo o corto) sustractivo. En esta máquina se debe de tener cuidado con la conexión respetando las marcas de polaridad, ya que si se conecta con la polaridad de los (*) los flujos internos de la máquina se suman (aditivo), y si se conectan con la polaridad de los (^) los flujo internos se restan (sustractivo). Son recomendables usarlos en las fábricas donde se requiera una respuesta estable de par constante para un rango de velocidades amplio.
9. DOCUMENTOS DE CONSULTA
MSc. Ing. Raúl Alberto Mamani Gonzáles,“Máquinas Eléctricas Síncronas”,
Primera Edición, Oruro – Bolivia, 2008.
Maquinas eléctricas – Jesús Fraile Mora
Maquinas eléctricas tomo 1- Kostenko
Apuntes de clases de teoría de máquinas eléctricas - Ing. Víctor Hugo Medrano