Practica 1-3
Practica 1-3
Descargar como docx, pdf o txt
También podría gustarte
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Arquitectura de Microcontrolador, PIC 16f887, PIC 18f4550Documento19 páginasArquitectura de Microcontrolador, PIC 16f887, PIC 18f4550Kathleen Leblanc100% (1)
- Monografía de MicrocontroladoresDocumento27 páginasMonografía de MicrocontroladoresLizbeth Gianella Egusquiza Vicente100% (1)
- Actividad 4 Perfil Egreso Mapa Curricular Antes Del 11Documento4 páginasActividad 4 Perfil Egreso Mapa Curricular Antes Del 11Mp JmpAún no hay calificaciones
- Instrumento de Evaluación EAR 2018Documento194 páginasInstrumento de Evaluación EAR 2018Nicol BahamondeAún no hay calificaciones
- Sentencia Regimen JuridicoDocumento10 páginasSentencia Regimen JuridicoAMIRA STEPHANNY MORENO ZAMBRANOAún no hay calificaciones
- Microcontroladores MONOGRAFIADocumento9 páginasMicrocontroladores MONOGRAFIAanacsa paulinoAún no hay calificaciones
- Introducción A Los MicrocontroladoresDocumento63 páginasIntroducción A Los MicrocontroladoresRony William Pineda BolAún no hay calificaciones
- Micro Control AdoresDocumento22 páginasMicro Control Adoresnel zambranoAún no hay calificaciones
- SDI Uc 01Documento100 páginasSDI Uc 01Damarishe Fonseca MorónAún no hay calificaciones
- SD01Documento100 páginasSD01Carlos Edgar Buitron QuispeAún no hay calificaciones
- ElectronicaDocumento3 páginasElectronicaDiego CampuzanoAún no hay calificaciones
- Microcontrolador EcuRedDocumento5 páginasMicrocontrolador EcuRedalejandroAún no hay calificaciones
- Curso Básico de Microcontroladores PICDocumento50 páginasCurso Básico de Microcontroladores PICEdison Correa0% (1)
- M1 290am07 Apunte DGDocumento25 páginasM1 290am07 Apunte DGDiego Pezo de la JaraAún no hay calificaciones
- INTRODUCCION A LOS PICsDocumento15 páginasINTRODUCCION A LOS PICsdylan castroAún no hay calificaciones
- Dispositivos Lógicos MicroprogramablesDocumento38 páginasDispositivos Lógicos MicroprogramablesGaby Ramos NavaAún no hay calificaciones
- MicrocontroladoresDocumento12 páginasMicrocontroladoresJesus Pozo ImánAún no hay calificaciones
- 4 MicrocontroladoresDocumento3 páginas4 MicrocontroladoresHumberto OrtegaAún no hay calificaciones
- Monografia Proyecto de Control Con MicrocontroladoresDocumento24 páginasMonografia Proyecto de Control Con MicrocontroladorestrabiesoAún no hay calificaciones
- Guía PICDocumento86 páginasGuía PICMako AntonioAún no hay calificaciones
- MicrocontroladoresDocumento9 páginasMicrocontroladoresJohnAndersonEspaña100% (1)
- Microcontroladores PICDocumento39 páginasMicrocontroladores PICAnonymous SFRw7AAún no hay calificaciones
- Introduccion A Los Microcontroladores PDFDocumento17 páginasIntroduccion A Los Microcontroladores PDFMaximiliano GiniAún no hay calificaciones
- MicrocontroladoresDocumento3 páginasMicrocontroladorescarloscocuyAún no hay calificaciones
- Guti Rami 5 IM2 P3Documento62 páginasGuti Rami 5 IM2 P3Gutierrez Ramirez Alana SofiaAún no hay calificaciones
- Retardo 1 Seg PIC16F887Documento7 páginasRetardo 1 Seg PIC16F887Andrees Liceea PiñaaAún no hay calificaciones
- Microntroladores: 1. ConceptoDocumento8 páginasMicrontroladores: 1. ConceptoMarShall MqVAún no hay calificaciones
- Tarea 07-Bao Villarreal, Frankarlos.Documento9 páginasTarea 07-Bao Villarreal, Frankarlos.Francarlos Bao VillarrealAún no hay calificaciones
- Introducción A Los Sistemas ProgramablesDocumento7 páginasIntroducción A Los Sistemas Programablesevaob75Aún no hay calificaciones
- INTRODUCCION Al MicrocontroladorDocumento18 páginasINTRODUCCION Al MicrocontroladorgentzugaAún no hay calificaciones
- Investigacion 1 U1Documento11 páginasInvestigacion 1 U1ronaldoAún no hay calificaciones
- Aplicaciones y Uso de Los MicrocontroladoresDocumento1 páginaAplicaciones y Uso de Los MicrocontroladoresOscar Joshua Arias CansinoAún no hay calificaciones
- Apuntes Introduccion A Los MicrocontroladoresDocumento62 páginasApuntes Introduccion A Los MicrocontroladoresJose Carlos OsAún no hay calificaciones
- MicrocontroladoresDocumento6 páginasMicrocontroladoresNestor Enrique Arriagada PadillaAún no hay calificaciones
- 5 Diferencia Entre Microcontroladores y MicroprocesadoresDocumento8 páginas5 Diferencia Entre Microcontroladores y MicroprocesadoresNilson MaldonadoAún no hay calificaciones
- S1 Actividad Semana 1revDocumento6 páginasS1 Actividad Semana 1revVictoria RomanAún no hay calificaciones
- Entorno de Desarrollo para PICDocumento19 páginasEntorno de Desarrollo para PICanomiatotal100% (1)
- 1.2 Caracteristica y Aplicaciones de Los MicrocontroladoresDocumento13 páginas1.2 Caracteristica y Aplicaciones de Los MicrocontroladoresLuis Fredy Sanchez DiazAún no hay calificaciones
- A Capacidad de Las MemoriasDocumento5 páginasA Capacidad de Las MemoriasAna Karen Calamani FloresAún no hay calificaciones
- GUÍA CUARTO Avance TEORÍA ONCES - V5-2023Documento6 páginasGUÍA CUARTO Avance TEORÍA ONCES - V5-20230.migue.899Aún no hay calificaciones
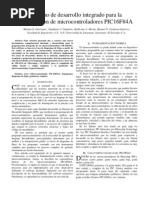
- Entorno de Desarrollo Integrado para La Programacion de Micro Control Adores PIC16F84Documento5 páginasEntorno de Desarrollo Integrado para La Programacion de Micro Control Adores PIC16F84MarlonAún no hay calificaciones
- UntitledDocumento22 páginasUntitleddavid giraldo lopezAún no hay calificaciones
- 1.2 Caracteristica y Aplicaciones de Los MicrocontroladoresDocumento13 páginas1.2 Caracteristica y Aplicaciones de Los MicrocontroladoresLuis Fredy Sanchez DiazAún no hay calificaciones
- MICROCONTROLADORESDocumento39 páginasMICROCONTROLADORESCarlos Lopez100% (1)
- Introduccion A Los MicrocontroladoresDocumento2 páginasIntroduccion A Los MicrocontroladoresMisael Ramos CarlosAún no hay calificaciones
- Manual de Apuntes (08!02!2010)Documento14 páginasManual de Apuntes (08!02!2010)Juan M. UrquizaAún no hay calificaciones
- Reportes Micro 3-EjercicioDocumento18 páginasReportes Micro 3-EjercicioGerman RodriguezAún no hay calificaciones
- Informe de Microcontroladores Semana05Documento9 páginasInforme de Microcontroladores Semana05Jhonatan N. Cedillo FloresAún no hay calificaciones
- Mapa Conceptual Microcontroladores (Tipos y Clasificación)Documento8 páginasMapa Conceptual Microcontroladores (Tipos y Clasificación)SAMANTHA LOPEZ MONTALVOAún no hay calificaciones
- Micro 1Documento126 páginasMicro 1Francisco Gomez100% (2)
- Taller IoT Corte II SEMANA 1 Sistemas EmbebidosDocumento8 páginasTaller IoT Corte II SEMANA 1 Sistemas EmbebidosMATEOAún no hay calificaciones
- Microcontrolador Microcomputadora MicroprocesadorDocumento10 páginasMicrocontrolador Microcomputadora MicroprocesadorOscarPachecoAún no hay calificaciones
- microcontrolador-MONOGRAFIA - GRUPO 04Documento7 páginasmicrocontrolador-MONOGRAFIA - GRUPO 04Samy MatosAún no hay calificaciones
- Data LoggerDocumento4 páginasData LoggerJCarlos GarcAún no hay calificaciones
- Comparativa UcDocumento28 páginasComparativa Ucmarcos garcia aguayoAún no hay calificaciones
- Alarma EspeDocumento98 páginasAlarma EspeJohn PorterAún no hay calificaciones
- MICROCONTROLADORES Clase01Documento12 páginasMICROCONTROLADORES Clase01Janeth QuicoAún no hay calificaciones
- PIC16F877Documento140 páginasPIC16F877jaime2828Aún no hay calificaciones
- Conceptos IntroductoriosDocumento16 páginasConceptos IntroductoriosJorge A. CamposAún no hay calificaciones
- Componentes de Un MicrocontroladorDocumento5 páginasComponentes de Un MicrocontroladorBrendaAún no hay calificaciones
- Computación Física: Explorando la visión por computadora en la computación físicaDe EverandComputación Física: Explorando la visión por computadora en la computación físicaAún no hay calificaciones
- Revocacion de DonacionDocumento7 páginasRevocacion de DonacionJose CauraAún no hay calificaciones
- Tipos de Suelos de NicaraguaDocumento4 páginasTipos de Suelos de NicaraguaGutierrez Lopez Jose JesusAún no hay calificaciones
- 8 Decalogo Del Desarrollo PDFDocumento24 páginas8 Decalogo Del Desarrollo PDFYefri JonasAún no hay calificaciones
- Programa Comunidad 2024Documento9 páginasPrograma Comunidad 2024El Gomi facheroAún no hay calificaciones
- Administración Del Departamento de VentasDocumento4 páginasAdministración Del Departamento de VentasGloria GuzmanAún no hay calificaciones
- Xisqua El Germinar de La Historia MuiscaDocumento18 páginasXisqua El Germinar de La Historia Muiscakarina LlanosAún no hay calificaciones
- Sap PP Manual UsuarioDocumento10 páginasSap PP Manual UsuarioMario A. AvilaAún no hay calificaciones
- Book Triskelion5 EsDocumento91 páginasBook Triskelion5 EsSierraChAún no hay calificaciones
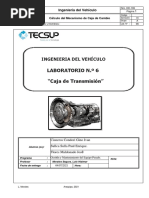
- Lab 6 - Ingeniería Del Vehículo - Caja de Cambio1Documento14 páginasLab 6 - Ingeniería Del Vehículo - Caja de Cambio1Jose Francisco Flores MaldonadoAún no hay calificaciones
- Diagnostico SPT - A 6°Documento50 páginasDiagnostico SPT - A 6°Katherine Andrea PeñaAún no hay calificaciones
- La Matematica en La AdministraciónDocumento1 páginaLa Matematica en La AdministraciónAJOSESIN2Aún no hay calificaciones
- Memoria Descriptiva Implementacion y Equipamiento en Las Areas AdministrativasDocumento5 páginasMemoria Descriptiva Implementacion y Equipamiento en Las Areas AdministrativasjoanejanAún no hay calificaciones
- U.T. 1 Ejercicios Salud LaboralDocumento5 páginasU.T. 1 Ejercicios Salud LaboralJimenaAún no hay calificaciones
- Matematica Actividad 1-AdrianDocumento7 páginasMatematica Actividad 1-AdrianAyleen LopezAún no hay calificaciones
- Actividades 2Documento3 páginasActividades 2mrubiobrionesAún no hay calificaciones
- Calculo de Altura de Antenas de Un RadioenlaceDocumento18 páginasCalculo de Altura de Antenas de Un RadioenlaceEnzo Martinez100% (1)
- Libros Subidos Grupo Favorito (Del 14 Marzo Al 2 Mayo de 2021)Documento294 páginasLibros Subidos Grupo Favorito (Del 14 Marzo Al 2 Mayo de 2021)Anthony Quimis60% (5)
- Cartera de ArbitrajeDocumento11 páginasCartera de ArbitrajeFelipe Parra GutierrezAún no hay calificaciones
- PedagogizacionDocumento31 páginasPedagogizacionAlejandra OjedaAún no hay calificaciones
- Sociologia StubrinDocumento112 páginasSociologia StubrinMarcos Bartulovich100% (1)
- Evaluacion DylanDocumento5 páginasEvaluacion DylanEduardo Suarez TamezAún no hay calificaciones
- P24341 Plataforma Movil Media Cabina (Certificada Bajo NTC 5926-3)Documento13 páginasP24341 Plataforma Movil Media Cabina (Certificada Bajo NTC 5926-3)diworelevadoressasAún no hay calificaciones
- Didáctica 2 Módulos-ResumenIIDocumento193 páginasDidáctica 2 Módulos-ResumenIIMicaela CarussiAún no hay calificaciones
- Cuadro Comparativo RIESGO BIOLOGICODocumento2 páginasCuadro Comparativo RIESGO BIOLOGICOCarolina HerreraAún no hay calificaciones
- Elepco S.A. Rendicion Cuentas 2018-EnviadoDocumento22 páginasElepco S.A. Rendicion Cuentas 2018-EnviadoJhonn HuįñanAún no hay calificaciones
- Nexo 412 Apps v1 4 PDFDocumento7 páginasNexo 412 Apps v1 4 PDFindustrialAún no hay calificaciones
- Uf1640 Interpretacion de Planos de Soldadura OnlineDocumento8 páginasUf1640 Interpretacion de Planos de Soldadura OnlineLester GuerraAún no hay calificaciones