TD
TD
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Banque PT SIA 2011 (Corrigé)Document15 pagesBanque PT SIA 2011 (Corrigé)Aliou DialloPas encore d'évaluation
- ds2 23 24Document7 pagesds2 23 24Zineb Ajem100% (1)
- CIN06 TD Corrigé - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFDocument4 pagesCIN06 TD Corrigé - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFBouslama N100% (1)
- CI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueDocument6 pagesCI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- TD132 CorrectionDocument6 pagesTD132 CorrectionTalel MissaouiPas encore d'évaluation
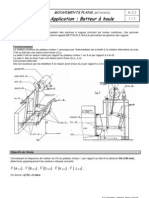
- Batteur A HouleDocument2 pagesBatteur A HouleGuillaume NaniPas encore d'évaluation
- td4 2016 17Document4 pagestd4 2016 17Zaineb AbbadPas encore d'évaluation
- SujetDocument28 pagesSujetbargo90Pas encore d'évaluation
- TD RobotDocument1 pageTD RobotIteb EssarajPas encore d'évaluation
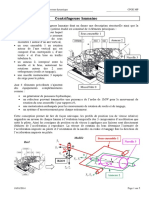
- (Cin) (TD) Centrifugeuse Humaine PDFDocument4 pages(Cin) (TD) Centrifugeuse Humaine PDFoussemaPas encore d'évaluation
- CINEMATIQUE GRAPHIQUE Preparation 214 PDFDocument10 pagesCINEMATIQUE GRAPHIQUE Preparation 214 PDFYoussef RachidPas encore d'évaluation
- TD 11 - Cinématique Graphique - Composition Des Vecteurs VitessesDocument4 pagesTD 11 - Cinématique Graphique - Composition Des Vecteurs Vitessesmouly100% (1)
- TD 12 - Comportement Cinématique Des SystèmesDocument10 pagesTD 12 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- TD 05-02Document3 pagesTD 05-02Roc100% (1)
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- GM DS4-2015 CorrigeDocument5 pagesGM DS4-2015 Corrigeahmed TVPas encore d'évaluation
- Apsim 18 DynamiqueDocument4 pagesApsim 18 DynamiqueKarima HamdanPas encore d'évaluation
- TD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationibrahim rabbajPas encore d'évaluation
- TD 1 de Mecanique Appliquee CA 2021 2022Document10 pagesTD 1 de Mecanique Appliquee CA 2021 2022Assane NiangaoPas encore d'évaluation
- Centre D Usinage 5 Axes CorrigeDocument2 pagesCentre D Usinage 5 Axes CorrigeLAILA IDRISSI100% (1)
- (Cin) (TD) Manege Pieuvre-2Document2 pages(Cin) (TD) Manege Pieuvre-2Omaima BelgacemPas encore d'évaluation
- Exos CinématiqueDocument40 pagesExos Cinématiquehamzasaad615Pas encore d'évaluation
- CNC Tsi 2019 Genie Mecanique SujetDocument13 pagesCNC Tsi 2019 Genie Mecanique SujetdfffePas encore d'évaluation
- 4 BarresDocument2 pages4 BarresAbdelilah Elmesbahi50% (2)
- TD Flexion Groupe ADocument2 pagesTD Flexion Groupe Aerzrzretgertfertge100% (1)
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckPas encore d'évaluation
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelPas encore d'évaluation
- TD Embiellage Moto GraphiqueDocument1 pageTD Embiellage Moto GraphiqueDABAKH LDEEBOY100% (1)
- TD 08Document4 pagesTD 08Abdou HamaouiPas encore d'évaluation
- Aop 2Document5 pagesAop 2MedySmartPas encore d'évaluation
- CinématiqueSolide CoursTDDocument14 pagesCinématiqueSolide CoursTDcyrinekrichen24Pas encore d'évaluation
- Corrigé ARCS 2020Document8 pagesCorrigé ARCS 2020Mouhcine Ben MoussaPas encore d'évaluation
- ChainesFermees Applications 01Document4 pagesChainesFermees Applications 01Tigma AarousPas encore d'évaluation
- TD4 Cinématique Du Solide 24Document4 pagesTD4 Cinématique Du Solide 24saly.sarr220t9Pas encore d'évaluation
- Exo 8 Batteur A HouleDocument4 pagesExo 8 Batteur A HouleDABAKH LDEEBOYPas encore d'évaluation
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocument3 pagesTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyPas encore d'évaluation
- Untitled 1Document2 pagesUntitled 1zhiwaPas encore d'évaluation
- Cours - Cinématique Et Statique - MPSI - MELLOUI - CompressedDocument76 pagesCours - Cinématique Et Statique - MPSI - MELLOUI - CompressedKi RixPas encore d'évaluation
- CinématiquePoint CoursTDDocument11 pagesCinématiquePoint CoursTDKhadija Ben MiledPas encore d'évaluation
- Courbe de BézierDocument39 pagesCourbe de BézierYosra JbeliPas encore d'évaluation
- Sinus MaticDocument3 pagesSinus MaticAbdelali YacoubiPas encore d'évaluation
- Mecanique Appliquée 2 - 2018-2019Document43 pagesMecanique Appliquée 2 - 2018-2019Christian YepjoPas encore d'évaluation
- Synthese SUP MecaDocument21 pagesSynthese SUP MecaemyazPas encore d'évaluation
- Flexion partie3RDM2Document9 pagesFlexion partie3RDM2khalidPas encore d'évaluation
- td2 MS 19 20 PDFDocument2 pagestd2 MS 19 20 PDFIbtihaj MlPas encore d'évaluation
- Corrige Liais Equiv en ParalleleDocument4 pagesCorrige Liais Equiv en ParalleleAyou HamPas encore d'évaluation
- Dynamique SiDocument10 pagesDynamique Siamo norPas encore d'évaluation
- Décrire Un Système Par Une Chaîne Fonctionnelle: Exercice 1: Prothèse Transtubiale ActiveDocument8 pagesDécrire Un Système Par Une Chaîne Fonctionnelle: Exercice 1: Prothèse Transtubiale Activebijhou mcPas encore d'évaluation
- TD (Graphe de Liaisons)Document3 pagesTD (Graphe de Liaisons)Saad JebbariPas encore d'évaluation
- Concate Exam ECADocument28 pagesConcate Exam ECASam SamPas encore d'évaluation
- TD 09 Corrigé - Cinématique Analytique - Dérivation Vectorielle PDFDocument8 pagesTD 09 Corrigé - Cinématique Analytique - Dérivation Vectorielle PDFDon Yassine100% (2)
- TD Cinematique CHARIOT FILOGUIDE PDFDocument4 pagesTD Cinematique CHARIOT FILOGUIDE PDFanassPas encore d'évaluation
- 01 Dynamique - Des - SolidesDocument14 pages01 Dynamique - Des - Solidesradu70Pas encore d'évaluation
- Cours 12Document5 pagesCours 12BalalaŇaŖîfPas encore d'évaluation
- A 1 Correction Des ExercicesDocument17 pagesA 1 Correction Des Exercicesrebeccaeakins818Pas encore d'évaluation
- 02.4 - Outils Mathématiques Calcul Vectoriel PDFDocument11 pages02.4 - Outils Mathématiques Calcul Vectoriel PDFAlaealeaPas encore d'évaluation
- ProjMMD1 BarrageTamiseSujet PDFDocument22 pagesProjMMD1 BarrageTamiseSujet PDFclara supiotPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Le Big Bang: Une Théorie Basée sur une Physique Invalide et des Mathématiques Erronées.D'EverandLe Big Bang: Une Théorie Basée sur une Physique Invalide et des Mathématiques Erronées.Pas encore d'évaluation
- Armes Électromagnétiques: La prochaine génération de la marine va micro-ondes l'électronique ennemieD'EverandArmes Électromagnétiques: La prochaine génération de la marine va micro-ondes l'électronique ennemiePas encore d'évaluation
- Chap 04 1Document23 pagesChap 04 1rayamPas encore d'évaluation
- Chapitre III: L'analyse Push OverDocument20 pagesChapitre III: L'analyse Push OverskylarshinePas encore d'évaluation
- Cours Acoustique ImedDocument61 pagesCours Acoustique ImedNesrine ZOUBEIDIPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Coulibaly DavidPas encore d'évaluation
- Si Psi DR 2o2oDocument8 pagesSi Psi DR 2o2omalik saadounPas encore d'évaluation
- Résumés Des Cours de Physique PCSIDocument122 pagesRésumés Des Cours de Physique PCSIMelsophos100% (13)
- Exercice ConvoyeurDocument6 pagesExercice ConvoyeurHajar AmalouPas encore d'évaluation
- Le Logiciel Alizé-LcpcDocument14 pagesLe Logiciel Alizé-LcpcRidha AbdallahPas encore d'évaluation
- Electricite Cours Et Exercices PDFDocument3 pagesElectricite Cours Et Exercices PDFAbdelhay Khyi0% (1)
- 08-La Puissance Électrique Cours Prof - FlyhDocument4 pages08-La Puissance Électrique Cours Prof - FlyhMohamed FLPas encore d'évaluation
- 94 - Calcul Des PoteauxDocument11 pages94 - Calcul Des PoteauxMohamud LhafPas encore d'évaluation
- BP 2Document2 pagesBP 2Macrem MacremPas encore d'évaluation
- DS 8 2016Document8 pagesDS 8 2016Abderrahman MamouniPas encore d'évaluation
- Solution TD N°3 Notion de ForceDocument3 pagesSolution TD N°3 Notion de ForceffitouirPas encore d'évaluation
- Solution TD2Document10 pagesSolution TD2AymanMilanoPas encore d'évaluation
- Colle - 1 - CorrectionDocument7 pagesColle - 1 - CorrectionMarieme BoutraihPas encore d'évaluation
- Lecon2v2 PapierDocument22 pagesLecon2v2 PapierAlex Yvan SadiaPas encore d'évaluation
- TD 2Document2 pagesTD 2Younes AabaibouPas encore d'évaluation
- Gravitation Universelle 2Document1 pageGravitation Universelle 2JAWAD EL KHALLADIPas encore d'évaluation
- 1-Modelisation Et Parametrage Des Mecanismes - Assemble - OdtDocument12 pages1-Modelisation Et Parametrage Des Mecanismes - Assemble - Odtyassinebouazzi100% (1)
- TD1-Corr EssaiMéca-LGSIP Janv19Document2 pagesTD1-Corr EssaiMéca-LGSIP Janv19Mouhamed GUEYEPas encore d'évaluation
- ToupieDocument13 pagesToupieYOUNES KABBAJPas encore d'évaluation
- Disposition Optimale Du Ferraillage Dans Les Voiles en Beton ArmeDocument3 pagesDisposition Optimale Du Ferraillage Dans Les Voiles en Beton ArmeNani YouranPas encore d'évaluation
- SJT Bac Blanc 2Document11 pagesSJT Bac Blanc 2Axel SaidPas encore d'évaluation
- Wa0006.Document5 pagesWa0006.Ahmed ElhammadiPas encore d'évaluation
- Cours RDM Traction CompressionDocument2 pagesCours RDM Traction CompressionNzaou LucreshPas encore d'évaluation
- Cour 1 Transfert ThermiqueDocument79 pagesCour 1 Transfert ThermiqueyssouffahPas encore d'évaluation