Chapitre I Et II
Chapitre I Et II
Télécharger au format docx, pdf ou txt
Vous aimerez peut-être aussi
- Cours Controle ProcessusDocument339 pagesCours Controle ProcessusDayan Van RillaertPas encore d'évaluation
- Module 1 Chapitre 1 Schematisation Pneumatique A11Document32 pagesModule 1 Chapitre 1 Schematisation Pneumatique A11Brahim AmiatafaPas encore d'évaluation
- Dessiner Des Schemas Pneumatiques ProfessionnelsDocument7 pagesDessiner Des Schemas Pneumatiques ProfessionnelsprincePas encore d'évaluation
- ANNEXE TP Barrière AutomatiqueDocument4 pagesANNEXE TP Barrière Automatiqueantonin.duluc.smbPas encore d'évaluation
- Partie Commande Et OperativeDocument10 pagesPartie Commande Et OperativeHALAILIPas encore d'évaluation
- Chapitre IV - Cours - TEAI - 4Document10 pagesChapitre IV - Cours - TEAI - 4Wã Lïd SãådätPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1Dilekh AnisPas encore d'évaluation
- Chapitre1 ActionneurDocument7 pagesChapitre1 ActionneurabdousewagerPas encore d'évaluation
- Ressources AutomatismesDocument6 pagesRessources Automatismesmelina abderrahmanePas encore d'évaluation
- LET63 - Automatismes Industriels - Chapitre 1 Et TD1Document13 pagesLET63 - Automatismes Industriels - Chapitre 1 Et TD1adnanPas encore d'évaluation
- tp1 APIDocument13 pagestp1 APIYanis BakiriPas encore d'évaluation
- Unité 3. Les Systèmes AutomatisésDocument4 pagesUnité 3. Les Systèmes AutomatisésFouzia ElPas encore d'évaluation
- Chapitre1 Automatisme IndustrielleDocument24 pagesChapitre1 Automatisme Industrielleemanuel Munguakonkwa MigaboPas encore d'évaluation
- Chap2 APIDocument24 pagesChap2 APIFares ChetouhPas encore d'évaluation
- 2 - Les Systemes - AutomatisesDocument7 pages2 - Les Systemes - AutomatisesgafoualexandroPas encore d'évaluation
- 1 AutomatismeDocument16 pages1 AutomatismeAYMAN COUKIPas encore d'évaluation
- Cours 1 APIDocument5 pagesCours 1 APImohamedmessahel754Pas encore d'évaluation
- Chapitre I - Généralités Sur L Automatisme Et Les Systèmes de Production IndustrielsDocument26 pagesChapitre I - Généralités Sur L Automatisme Et Les Systèmes de Production IndustrielsBonhomie MikobiPas encore d'évaluation
- CommandeDocument25 pagesCommandewail abdelliPas encore d'évaluation
- Cours Chap1Document14 pagesCours Chap1Walid GhouliPas encore d'évaluation
- Système AutomatiséDocument5 pagesSystème AutomatiséAhmed EL ArfaouiPas encore d'évaluation
- Chap1 Lat64Document7 pagesChap1 Lat64riadbouhzila19Pas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1Yacine HidjaPas encore d'évaluation
- Copie de Cours-AutomatismeDocument80 pagesCopie de Cours-AutomatismeGaoussou CoulibalyPas encore d'évaluation
- Archi. Des Systemes AutomatisesDocument16 pagesArchi. Des Systemes AutomatisesBibo LovitchePas encore d'évaluation
- Système AutomatiséDocument3 pagesSystème Automatisémohamed aminePas encore d'évaluation
- RégulationDocument62 pagesRégulationaminakhalloutPas encore d'évaluation
- Cours Systemes AutomatisesDocument30 pagesCours Systemes Automatisessie Rachid TraorePas encore d'évaluation
- Cours 01 AutomatismeDocument20 pagesCours 01 AutomatismenadirPas encore d'évaluation
- Cours Api Complet 24Document45 pagesCours Api Complet 24anacer55100% (1)
- Sys AutoDocument3 pagesSys AutoMooh MouhPas encore d'évaluation
- Chapitre 1Document8 pagesChapitre 1haroun haPas encore d'évaluation
- Automatisme PDFDocument76 pagesAutomatisme PDFbbbbbPas encore d'évaluation
- Chapitre 1 FinalDocument23 pagesChapitre 1 Finalato ndongo fabricePas encore d'évaluation
- API - Chapter 1Document7 pagesAPI - Chapter 1Meriem SaadPas encore d'évaluation
- Les Installations Electriques IndustriellesDocument9 pagesLes Installations Electriques IndustriellesSiskoPas encore d'évaluation
- TPAPI1Document10 pagesTPAPI1rabie torkiPas encore d'évaluation
- Poste AssemblageDocument32 pagesPoste AssemblageOussama ObPas encore d'évaluation
- Cours AUTO INDUSTDocument17 pagesCours AUTO INDUSTEmma CalistePas encore d'évaluation
- 4.chap.4 Automatisme Et Informatique IndustrielleDocument8 pages4.chap.4 Automatisme Et Informatique IndustrielleHkbv GjvcPas encore d'évaluation
- 6 RegulationDocument14 pages6 RegulationfhamdiPas encore d'évaluation
- Compte Rendu de TP de Logique ProgrammableDocument23 pagesCompte Rendu de TP de Logique ProgrammableYayoune Kholio100% (1)
- Automatisé DifinitionDocument2 pagesAutomatisé DifinitionTS AUTOMATISATIONPas encore d'évaluation
- 6-Regulation CorrectionDocument14 pages6-Regulation CorrectionAla Edine BeroualPas encore d'évaluation
- Automatisme Et Circuit L2 Cours SONOU - 090200Document45 pagesAutomatisme Et Circuit L2 Cours SONOU - 090200Gildas HognonPas encore d'évaluation
- Cours 3 BT em A Cpmme TP API PDFDocument40 pagesCours 3 BT em A Cpmme TP API PDFkghislain9797Pas encore d'évaluation
- L'Automatique v4 Part1Document105 pagesL'Automatique v4 Part1MOHAMMEDPas encore d'évaluation
- Module Automatique Et Régulation IndustrielleDocument59 pagesModule Automatique Et Régulation IndustrielleYoussef MakmoulPas encore d'évaluation
- Chapitre II Matérialisation de Processus Industriels Par Les APIDocument4 pagesChapitre II Matérialisation de Processus Industriels Par Les APIأيمن ادريباتPas encore d'évaluation
- Technologie Des ComposantsDocument34 pagesTechnologie Des ComposantsSamuel LavenirPas encore d'évaluation
- Cours API - GRAFCETDocument31 pagesCours API - GRAFCETAnas YassinePas encore d'évaluation
- Ch1 Introduction AutomatiqueDocument10 pagesCh1 Introduction AutomatiqueAïcha KomaraPas encore d'évaluation
- Automatisation Et Supervision Par Api D'une Unite de Traitement Des EauDocument26 pagesAutomatisation Et Supervision Par Api D'une Unite de Traitement Des Eaukawtar elbirakiPas encore d'évaluation
- Chapitre 1Document78 pagesChapitre 1Anis YanisPas encore d'évaluation
- Cours I.S.I Chap 4 Doc ProfsDocument8 pagesCours I.S.I Chap 4 Doc ProfsNgari Junior KedjevaPas encore d'évaluation
- Chapitre 1 - Géneralités Sur Les SADocument7 pagesChapitre 1 - Géneralités Sur Les SAMohammed RhaiouzPas encore d'évaluation
- UntitledDocument64 pagesUntitledRedouane Chihabe100% (1)
- Generalite Bus TerrainDocument3 pagesGeneralite Bus Terrainsalwa.echalih-etuPas encore d'évaluation
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Maison Intelligente: Conception et réalisation d'une maison intelligenteD'EverandMaison Intelligente: Conception et réalisation d'une maison intelligenteÉvaluation : 4 sur 5 étoiles4/5 (5)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Vérifier la peseuse: Révolutionner le contrôle qualité avec la vision par ordinateurD'EverandVérifier la peseuse: Révolutionner le contrôle qualité avec la vision par ordinateurPas encore d'évaluation
- Préparation Du TP 4Document4 pagesPréparation Du TP 4BENYOUSSEF ANISPas encore d'évaluation
- Dossier D'homologationDocument31 pagesDossier D'homologationMohamed NasfiPas encore d'évaluation
- 01 IS 12 HydrauPneu Cours PDFDocument14 pages01 IS 12 HydrauPneu Cours PDFMohamed Omar33% (3)
- Cours de PneumatiqueDocument28 pagesCours de PneumatiqueRallphe EmanePas encore d'évaluation
- Projet AUTODocument14 pagesProjet AUTOAmir Na DzPas encore d'évaluation
- Introduction Aux Systèmes PneumatiquesDocument28 pagesIntroduction Aux Systèmes PneumatiquesSalma BelfallahPas encore d'évaluation
- 1ère TSI 15-16 (DOC ELEVE')Document154 pages1ère TSI 15-16 (DOC ELEVE')immane.imPas encore d'évaluation
- TP 1 Etude Pompe Piston PDFDocument11 pagesTP 1 Etude Pompe Piston PDFImen HammoudaPas encore d'évaluation
- Exercices RedressementDocument4 pagesExercices RedressementCheikh Sidya AidaraPas encore d'évaluation
- Gem 08802258Document92 pagesGem 08802258miloudkhalifPas encore d'évaluation
- Chapitre 4 5 Recepteurs LicenceDocument12 pagesChapitre 4 5 Recepteurs Licencea.zourkaleyniPas encore d'évaluation
- Cours Hydraulique Et Pneumatique2Document68 pagesCours Hydraulique Et Pneumatique2lotfi ben said100% (3)
- Mec 628Document6 pagesMec 628Aja YlPas encore d'évaluation
- Cours Actionneurs FluidiquesDocument45 pagesCours Actionneurs FluidiquesAnas Kerty100% (1)
- Pneumatique - Chapitre-I Partie-ADocument4 pagesPneumatique - Chapitre-I Partie-AAbdou Boulebnane BoulebnanePas encore d'évaluation
- Sécheur CD100-230 ManuelDocument9 pagesSécheur CD100-230 ManueltibPas encore d'évaluation
- Cours 00-Analyse FonctionnelleDocument14 pagesCours 00-Analyse Fonctionnellemaraghni_hassine7592Pas encore d'évaluation
- TP4 Pneumatique PDFDocument6 pagesTP4 Pneumatique PDFJoseph DamakoaPas encore d'évaluation
- Les Actionneur PneumatiqueDocument9 pagesLes Actionneur PneumatiqueNadir FellPas encore d'évaluation
- Verins Et ActionneursDocument23 pagesVerins Et ActionneursDésiré Ted100% (1)
- Actionneurs Pneumatiques++Document15 pagesActionneurs Pneumatiques++Sid Ahmed BenmamasPas encore d'évaluation
- Résumé Chapitre3 Systemes Hydrauliques Et PneumatiquesDocument4 pagesRésumé Chapitre3 Systemes Hydrauliques Et PneumatiquesMechmedPas encore d'évaluation
- Suspension Pneumatique Citroën C4 PicassoDocument29 pagesSuspension Pneumatique Citroën C4 Picassoaymendab100% (2)
- Comment Bien Choisir Son Distributeur HydrauliqueDocument4 pagesComment Bien Choisir Son Distributeur HydrauliqueHazar Moez SouissiPas encore d'évaluation
- TP 1 HydrauliqueDocument6 pagesTP 1 HydrauliqueHa DjerPas encore d'évaluation
- Megueddem Mohammed YazidDocument86 pagesMegueddem Mohammed YazidhalifPas encore d'évaluation
- Ep1 AfDocument3 pagesEp1 Afmahmoud rafikPas encore d'évaluation
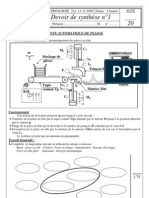
- Devoir de Synthèse N°1 - Technologie Poste de Pliage - 1ère AS (2009-2010) MR TANGOUR AliDocument4 pagesDevoir de Synthèse N°1 - Technologie Poste de Pliage - 1ère AS (2009-2010) MR TANGOUR Alintayoub100% (3)