The Jordan Loudspeaker Manual Chapter 6
The Jordan Loudspeaker Manual Chapter 6
Download as pdf or txt
You might also like
- Essential Mathematics For The Australian Curriculum Year 8Document17 pagesEssential Mathematics For The Australian Curriculum Year 8iapps0% (1)
- Duncan VCAs Part 3Document8 pagesDuncan VCAs Part 3Ian PressNo ratings yet
- EC2255-Solved Problems in Control Systems PDFDocument182 pagesEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (3)
- Tetra Sans PS - Glassware / Tubecad - by John BroskieDocument17 pagesTetra Sans PS - Glassware / Tubecad - by John BroskieRafael Frederico TeixeiraNo ratings yet
- Yamaha YST SW515 Subwoofer Review Lo-ResDocument4 pagesYamaha YST SW515 Subwoofer Review Lo-ResLeBackNo ratings yet
- Radiotron Designer's HandbookDocument1,539 pagesRadiotron Designer's HandbookAdam Paul100% (2)
- 1223 Usp 33 MicrobiologyvalidationDocument19 pages1223 Usp 33 Microbiologyvalidationعبدالعزيز بدرNo ratings yet
- Final Report On Op-Amp To OTA ConversionDocument41 pagesFinal Report On Op-Amp To OTA ConversionAman VatsNo ratings yet
- Analysis of Opamp Using PspiceDocument19 pagesAnalysis of Opamp Using PspiceKarThiNo ratings yet
- Vented. Box Loudspeaker Systems Part I1: Large-Signal AnalysisDocument7 pagesVented. Box Loudspeaker Systems Part I1: Large-Signal AnalysisEclys MontenegroNo ratings yet
- Yamaha Rx-V3067 Rx-A3010 SCHDocument89 pagesYamaha Rx-V3067 Rx-A3010 SCHCleber MouraNo ratings yet
- The Jordan Loudspeaker Manual Chapter 2Document4 pagesThe Jordan Loudspeaker Manual Chapter 2Adam PaulNo ratings yet
- ESE 568: Mixed Signal Design and Modeling Basic 2-Stage OpampDocument13 pagesESE 568: Mixed Signal Design and Modeling Basic 2-Stage OpampchandanaNo ratings yet
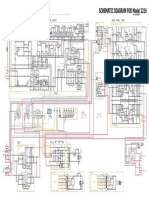
- Schematic Diagram For Model 2216: All VersionsDocument1 pageSchematic Diagram For Model 2216: All VersionsZa RacsoNo ratings yet
- Pro Co Rat AnalysisDocument16 pagesPro Co Rat AnalysisgianmarcoNo ratings yet
- Tda 2005 DatasheetDocument25 pagesTda 2005 DatasheetRuben NinaNo ratings yet
- Electronic Projects: 18W Audio AmplifierDocument2 pagesElectronic Projects: 18W Audio AmplifierLaurentiu DraganNo ratings yet
- Amplifier Frequecny ResponseDocument63 pagesAmplifier Frequecny ResponseNuman khanNo ratings yet
- 1308 - 12297 A New Class-D Stereo Audio Amplifier Using Direct Speaker Current ControlDocument3 pages1308 - 12297 A New Class-D Stereo Audio Amplifier Using Direct Speaker Current Controlrodales56No ratings yet
- Audio Transformer InductanceDocument8 pagesAudio Transformer InductanceCharles AustinNo ratings yet
- Analisis de Circuito Big MuffDocument10 pagesAnalisis de Circuito Big MuffNacho ConsolaniNo ratings yet
- Class D Tutorial 2Document74 pagesClass D Tutorial 2Gerardo Mendez CamarilloNo ratings yet
- Baxandall Tone ControlDocument7 pagesBaxandall Tone ControlSheeNo ratings yet
- Hfe Krell Kav-300i SchematicsDocument3 pagesHfe Krell Kav-300i SchematicsDRF254No ratings yet
- Basic VLSI SlidesDocument91 pagesBasic VLSI SlidesDivya AhujaNo ratings yet
- Nad 310 Integrated Amplifier SchematicDocument2 pagesNad 310 Integrated Amplifier SchematicRosevereNo ratings yet
- Sample Submissions For Test Bench: ND RDDocument7 pagesSample Submissions For Test Bench: ND RDfb79No ratings yet
- Baxandall Tone Controls - Elliott Sound (Org)Document13 pagesBaxandall Tone Controls - Elliott Sound (Org)nui338100% (1)
- HotFET Pre J-FET Audio Preamplifier SchematicsDocument6 pagesHotFET Pre J-FET Audio Preamplifier SchematicsJefri ErlanggaNo ratings yet
- GQX 3102Document2 pagesGQX 3102yohanaNo ratings yet
- Borbely On Line AmpsDocument26 pagesBorbely On Line Ampsehsannemesis6No ratings yet
- New Application of Evanescent Mode Waveguide To Filter DesignDocument9 pagesNew Application of Evanescent Mode Waveguide To Filter DesignhazardasssNo ratings yet
- Transistor Active High Pass Filter Electronics NotesDocument2 pagesTransistor Active High Pass Filter Electronics NotesRenato DeákNo ratings yet
- Lecture 6 - 7 Power - AmplifiersDocument77 pagesLecture 6 - 7 Power - AmplifierssunilsheelavantNo ratings yet
- LT Spice - Transformers - (By Mike Engelhardt)Document2 pagesLT Spice - Transformers - (By Mike Engelhardt)kimbalsummers801No ratings yet
- DB ConceptsDocument29 pagesDB ConceptsSasanka Sekhar PaniNo ratings yet
- Descrete Op Amp PapadopouDocument8 pagesDescrete Op Amp PapadopoupapadopouNo ratings yet
- Lecture 5: Transformers (Continued)Document16 pagesLecture 5: Transformers (Continued)Aldiansyah dtsNo ratings yet
- Matlab 8Document12 pagesMatlab 8M Azeem100% (1)
- Emg FiltersDocument48 pagesEmg FiltersTeheranNo ratings yet
- BJT IC Design: Rochester Institute of Technology Microelectronic EngineeringDocument41 pagesBJT IC Design: Rochester Institute of Technology Microelectronic EngineeringPauloConstantinoNo ratings yet
- Unit V - Active FiltersDocument14 pagesUnit V - Active Filterseshwar_worldNo ratings yet
- VSX-407RDS, - 607RDSDocument58 pagesVSX-407RDS, - 607RDSmichal_lysyNo ratings yet
- AmplifierDocument68 pagesAmplifierशुभम तिवारीNo ratings yet
- Simple Understanding DecibelsDocument2 pagesSimple Understanding DecibelsffortisimoNo ratings yet
- Opamp Desiging Project ReportDocument6 pagesOpamp Desiging Project ReportTarun PrakashNo ratings yet
- A Class-A Amplifier For Home Constructors: PART ONE - Design Considerations and A Circuit DescriptionDocument7 pagesA Class-A Amplifier For Home Constructors: PART ONE - Design Considerations and A Circuit DescriptionisaijhabinNo ratings yet
- Mike HarwoodDocument26 pagesMike HarwoodPraveen AndrewNo ratings yet
- Advanced Current Mirrors and Opamps: Hossein ShamsiDocument45 pagesAdvanced Current Mirrors and Opamps: Hossein ShamsiChristian Montano GalvezNo ratings yet
- Atcl 3 PDFDocument8 pagesAtcl 3 PDFgheo23No ratings yet
- ADC DAC DiscreteDocument4 pagesADC DAC Discretegersonymayer100% (1)
- VX-2100 2200 VHF EuDocument68 pagesVX-2100 2200 VHF EudenariraNo ratings yet
- Analog Filter Design Demystified: The Theory of Analog ElectronicsDocument11 pagesAnalog Filter Design Demystified: The Theory of Analog ElectronicsSanjay Parelkar100% (1)
- A Biblia Do P.A. - Sonorizacao - The P.A. Bible - em Ingles PDFDocument79 pagesA Biblia Do P.A. - Sonorizacao - The P.A. Bible - em Ingles PDFCarlos Henrique Otoni FerrerNo ratings yet
- Active Hi-Fi LoudspeakersDocument17 pagesActive Hi-Fi LoudspeakersCarioquenhoNo ratings yet
- EE609 Lect-6-2023 Horn ReflectorDocument25 pagesEE609 Lect-6-2023 Horn Reflectorgargbansalpulkit100% (1)
- Danley TappedDocument8 pagesDanley TappedmenombreesdanielNo ratings yet
- Main Article: FM Broadcast BandDocument22 pagesMain Article: FM Broadcast BandKristian MamarilNo ratings yet
- WCDMA: Requirements and Practical DesignFrom EverandWCDMA: Requirements and Practical DesignRudolf TannerNo ratings yet
- Transmission Lines in Digital Systems for EMC PractitionersFrom EverandTransmission Lines in Digital Systems for EMC PractitionersNo ratings yet
- Microwave Filters for Communication Systems: Fundamentals, Design, and ApplicationsFrom EverandMicrowave Filters for Communication Systems: Fundamentals, Design, and ApplicationsNo ratings yet
- The Jordan Loudspeaker Manual Chapter 5Document2 pagesThe Jordan Loudspeaker Manual Chapter 5Adam PaulNo ratings yet
- The Jordan Loudspeaker Manual Chapter 2Document4 pagesThe Jordan Loudspeaker Manual Chapter 2Adam PaulNo ratings yet
- The Jordan Loudspeaker Manual Chapter 1Document4 pagesThe Jordan Loudspeaker Manual Chapter 1Adam Paul100% (1)
- Interdisciplinary Unit PlanDocument6 pagesInterdisciplinary Unit Planapi-276580201No ratings yet
- Facile and Low Cost Temperature Compensated Humidity Sensor and Signal Conditioning SystemDocument9 pagesFacile and Low Cost Temperature Compensated Humidity Sensor and Signal Conditioning SystembackupzalfaaNo ratings yet
- 346 Lab ManualDocument26 pages346 Lab ManualsazinaNo ratings yet
- Chapter 4 - Additional Analysis Techniques SlidesDocument52 pagesChapter 4 - Additional Analysis Techniques SlidesDouglas OngomNo ratings yet
- Navdeep Gill, Patrick Hall - An Introduction To Machine Learning Interpretability (2018, O'Reilly Media, Inc.) PDFDocument45 pagesNavdeep Gill, Patrick Hall - An Introduction To Machine Learning Interpretability (2018, O'Reilly Media, Inc.) PDFWirawan SetialaksanaNo ratings yet
- ME Math 8 Q1 0303 SGDocument22 pagesME Math 8 Q1 0303 SGHarvey BacudNo ratings yet
- What Is Geometric Nonlinearity - COMSOLDocument15 pagesWhat Is Geometric Nonlinearity - COMSOLLakshman ReddyNo ratings yet
- DLL Math 8 Quarter 2 Week 4Document6 pagesDLL Math 8 Quarter 2 Week 4Jay Paul T. Badenas100% (1)
- Lecture-5 - Nonlinear Systems - 1Document17 pagesLecture-5 - Nonlinear Systems - 1Everly NNo ratings yet
- MPX2010 PDFDocument17 pagesMPX2010 PDFEnte Bliss OnixNo ratings yet
- Domain and Range Functions Worksheets With AnswersDocument12 pagesDomain and Range Functions Worksheets With AnswersChristine Niña Agdeppa0% (1)
- Grade 10 Mathematics ReviewerDocument3 pagesGrade 10 Mathematics ReviewerPhillip GabaynoNo ratings yet
- 5.7 Interpreting Graphs of Linear Functions 2Document3 pages5.7 Interpreting Graphs of Linear Functions 2Angel LawsonNo ratings yet
- Linearity and Sensitivity Error in The Use of Single Strain Gages With Voltage-Fed and Current-Fed CircuitsDocument7 pagesLinearity and Sensitivity Error in The Use of Single Strain Gages With Voltage-Fed and Current-Fed CircuitsGilbertoAndresDuarteNo ratings yet
- Semi-Detailed Lesson PlanDocument5 pagesSemi-Detailed Lesson PlanGERLYN GULLOSNo ratings yet
- E317-94 UT Evaluating Equip Performance PDFDocument11 pagesE317-94 UT Evaluating Equip Performance PDFjalcazar77100% (1)
- MPX10DPDocument8 pagesMPX10DPsuperpuma86No ratings yet
- Math 531 - Partial Differential Equations: Separation of VariablesDocument32 pagesMath 531 - Partial Differential Equations: Separation of VariablesVideo Editing TimeNo ratings yet
- InstrumentationDocument34 pagesInstrumentationAmr AliNo ratings yet
- 8th Grade Study Island Pathway RecordingsDocument3 pages8th Grade Study Island Pathway Recordingsapi-293256153No ratings yet
- Uji LinieritasDocument3 pagesUji LinieritasIda Surtiana20No ratings yet
- Lecure-1 Introduction To Biomedical Instrumentation System - 4Document41 pagesLecure-1 Introduction To Biomedical Instrumentation System - 4Noor Ahmed80% (5)
- BASIC InstrumentationDocument13 pagesBASIC InstrumentationVignesh RajanNo ratings yet
- 2.3 Linear Approximation of Physical SystemsDocument3 pages2.3 Linear Approximation of Physical SystemsramNo ratings yet
- Current Transducer LF 510-S 500 ADocument7 pagesCurrent Transducer LF 510-S 500 AAhmad Fahmi AriefNo ratings yet
- UT Chapter 11Document70 pagesUT Chapter 11knizam1971100% (1)