MCT Question Bank
MCT Question Bank
Download as docx, pdf, or txt
You might also like
- Sundial Bridge AnalysisDocument10 pagesSundial Bridge Analysiss4120146No ratings yet
- Exercises AnalysismethodsDocument12 pagesExercises AnalysismethodsMaan Hinolan50% (2)
- Linear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemDocument8 pagesLinear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemMuhammad Saad AbdullahNo ratings yet
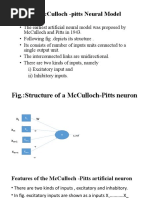
- Mcculloch-Pitts Neural Model and Pattern Classification.Document13 pagesMcculloch-Pitts Neural Model and Pattern Classification.MercyNo ratings yet
- Unit-5 Part C 1) Explain The Q Function and Q Learning Algorithm Assuming Deterministic Rewards and Actions With Example. Ans)Document11 pagesUnit-5 Part C 1) Explain The Q Function and Q Learning Algorithm Assuming Deterministic Rewards and Actions With Example. Ans)QUARREL CREATIONSNo ratings yet
- Dica Question BankDocument4 pagesDica Question BankOmprakash KuswahaNo ratings yet
- Complex Engineering Problem DCS 2020Document1 pageComplex Engineering Problem DCS 2020tasibkhanNo ratings yet
- CH - 12 MACDocument55 pagesCH - 12 MACsonyNo ratings yet
- NCIIT 12 ProceedingsDocument86 pagesNCIIT 12 ProceedingsBritto Ebrington Ajay100% (1)
- DSP Chapter 2 Part 1Document45 pagesDSP Chapter 2 Part 1api-26581966100% (1)
- Neural Network Two Mark Q.BDocument19 pagesNeural Network Two Mark Q.BMohanvel2106No ratings yet
- Sample Exam Questions With AnswersDocument5 pagesSample Exam Questions With AnswersMauricio PresotoNo ratings yet
- Expt 3 Generation of Continous Signal CañeteDocument4 pagesExpt 3 Generation of Continous Signal CañeteJHUSTINE CAÑETENo ratings yet
- Neurofuzzy ControllerDocument15 pagesNeurofuzzy ControllerFredy Giovany Osorio GutiérrezNo ratings yet
- Systems For Digital Signal Processing: 1 - IntroductionDocument21 pagesSystems For Digital Signal Processing: 1 - IntroductionBomber KillerNo ratings yet
- Advanced DSPDocument2 pagesAdvanced DSPAshar Wahid Hashmi50% (2)
- Ec8552-Cao Unit 5Document72 pagesEc8552-Cao Unit 5Anonymous c75J3yX33No ratings yet
- Robot DH FKSDocument38 pagesRobot DH FKSengrodeNo ratings yet
- Final Exam - High VoltageDocument5 pagesFinal Exam - High VoltageAdel El-NahasNo ratings yet
- Ad Hoc and Wireless Sensor Networks - Ec8702: Session byDocument28 pagesAd Hoc and Wireless Sensor Networks - Ec8702: Session byRaja MadhuvanthiNo ratings yet
- Jntuh Previous Year PaperDocument2 pagesJntuh Previous Year Paper20BA693 Kmit0% (1)
- Digital Transmission TechniquesDocument85 pagesDigital Transmission TechniquesTafadzwa MurwiraNo ratings yet
- Assignment 3Document19 pagesAssignment 3Sure AvinashNo ratings yet
- Assignments - NOC - MATLAB Programming For Numerical ComputationDocument9 pagesAssignments - NOC - MATLAB Programming For Numerical ComputationPraghashrajaNo ratings yet
- Evaluation Metrics For Regression: Dr. Jasmeet Singh Assistant Professor, Csed Tiet, PatialaDocument13 pagesEvaluation Metrics For Regression: Dr. Jasmeet Singh Assistant Professor, Csed Tiet, PatialaDhananjay ChhabraNo ratings yet
- 9 - Neural Modelling and ControlDocument17 pages9 - Neural Modelling and ControlIsmael EspinozaNo ratings yet
- Multirate Signal Processing 1.4Document45 pagesMultirate Signal Processing 1.4criharshaNo ratings yet
- Microcontroller and PLCDocument3 pagesMicrocontroller and PLCsivaeeinfo0% (1)
- Signals Systems Question PaperDocument14 pagesSignals Systems Question PaperCoeus Apollo100% (1)
- Bci Unit 3Document28 pagesBci Unit 3personaluses3289No ratings yet
- EE 340: Control Systems Lab 4 Manual Introduction To SimulinkDocument13 pagesEE 340: Control Systems Lab 4 Manual Introduction To SimulinkAnsar NiaziNo ratings yet
- 3 - ANN Part One PDFDocument30 pages3 - ANN Part One PDFIsmael EspinozaNo ratings yet
- MPMC Lab Manual To PrintDocument138 pagesMPMC Lab Manual To PrintKasthuri SelvamNo ratings yet
- Aim: To Convert CD To DVD Data Software: Matlab 2013A TheoryDocument2 pagesAim: To Convert CD To DVD Data Software: Matlab 2013A TheoryHabeeb AliNo ratings yet
- Experiment No. 2 Control System Simulation Using MATLAB and SIMULINKDocument11 pagesExperiment No. 2 Control System Simulation Using MATLAB and SIMULINKSom Pratap SinghNo ratings yet
- تشييكDocument30 pagesتشييكAbdullah zxNo ratings yet
- Experiment - 6 Four-Quadrant Operation of DC MotorDocument12 pagesExperiment - 6 Four-Quadrant Operation of DC Motoreng_abdelghany1979No ratings yet
- U L D R: Nsupervised Earning and Imensionality EductionDocument58 pagesU L D R: Nsupervised Earning and Imensionality EductionSanaullahSunnyNo ratings yet
- Modern Control Systems (MCS) : Lecture-41-42 Design of Control Systems in Sate SpaceDocument21 pagesModern Control Systems (MCS) : Lecture-41-42 Design of Control Systems in Sate SpaceVeena Divya KrishnappaNo ratings yet
- Cellular and Mobile Communications: Subject Code: A70434 Ece - Iv-I Sem Jntuh-R15Document306 pagesCellular and Mobile Communications: Subject Code: A70434 Ece - Iv-I Sem Jntuh-R15YashwantSaiKishoreNo ratings yet
- Introduction To Communication System Course OutlineDocument3 pagesIntroduction To Communication System Course OutlineBirhanu MelsNo ratings yet
- Embedded Systems SRSDocument4 pagesEmbedded Systems SRSkingloky100% (1)
- ADHOC UNIT-1 Applications PDFDocument32 pagesADHOC UNIT-1 Applications PDFNithish Kumar0% (1)
- Tutorial I Basics of State Variable ModelingDocument11 pagesTutorial I Basics of State Variable ModelingRebecca GrayNo ratings yet
- Discrete-Time Signals and Systems - GDLCDocument111 pagesDiscrete-Time Signals and Systems - GDLCRavi BankNo ratings yet
- Lab 3 QUBE-Servo First Principles Modeling Workbook (Student)Document6 pagesLab 3 QUBE-Servo First Principles Modeling Workbook (Student)Luis EnriquezNo ratings yet
- Lab Requirements Ece University Inspection Reg 2017Document12 pagesLab Requirements Ece University Inspection Reg 2017sukirthanrajasreesweNo ratings yet
- Content Beyond SyllabusDocument3 pagesContent Beyond SyllabusSasithar JaisankaranNo ratings yet
- Unit V Peripheral InterfacingDocument38 pagesUnit V Peripheral Interfacingsuperkan61950% (2)
- Full State Feedback ControlDocument8 pagesFull State Feedback ControlGabriel RodriguesNo ratings yet
- Lesson Plan - Signals & Systems 2012Document3 pagesLesson Plan - Signals & Systems 2012KALAIMATHINo ratings yet
- Iare Ece Vi-Emi Emi-Lecture Notes-Word NewDocument185 pagesIare Ece Vi-Emi Emi-Lecture Notes-Word NewSiva KumarNo ratings yet
- JNTUH Signals and Systems NotesDocument67 pagesJNTUH Signals and Systems Notesq1213jNo ratings yet
- BM304 Biomedical Signal Processing PDFDocument2 pagesBM304 Biomedical Signal Processing PDFsethuNo ratings yet
- ECE4007 Information-Theory-And-Coding ETH 1 AC40Document3 pagesECE4007 Information-Theory-And-Coding ETH 1 AC40harshitNo ratings yet
- Exam2005 2Document19 pagesExam2005 2kib67070% (1)
- Channel Assignment Strategies, Handoff Strategies Improvement inDocument37 pagesChannel Assignment Strategies, Handoff Strategies Improvement inHarpuneet SinghNo ratings yet
- ECL333 - Ktu QbankDocument7 pagesECL333 - Ktu QbankRoshith KNo ratings yet
- R07 Set No. 2Document8 pagesR07 Set No. 2chenumallaNo ratings yet
- 4364 540 DigitalControlDocument2 pages4364 540 DigitalControlyogesh_b_kNo ratings yet
- Control SystemsDocument8 pagesControl Systemsvasantha_btechNo ratings yet
- Microstructure, Mechanical Properties and Non-Destructive Test On Dissimilar AA5083-AA7075 Aluminium Alloys Using GTAWDocument14 pagesMicrostructure, Mechanical Properties and Non-Destructive Test On Dissimilar AA5083-AA7075 Aluminium Alloys Using GTAWKalamchety Ravikumar SrinivasaNo ratings yet
- Batch5supercapacitor 150808131503 Lva1 App6892Document54 pagesBatch5supercapacitor 150808131503 Lva1 App6892Kalamchety Ravikumar SrinivasaNo ratings yet
- 2017-2019 Batch PanelDocument2 pages2017-2019 Batch PanelKalamchety Ravikumar SrinivasaNo ratings yet
- RECOMMENDATIONS OF PROJECT REVIEW COMMITTEE Format EeeDocument1 pageRECOMMENDATIONS OF PROJECT REVIEW COMMITTEE Format EeeKalamchety Ravikumar SrinivasaNo ratings yet
- Students Details Sar 2016-17Document39 pagesStudents Details Sar 2016-17Kalamchety Ravikumar SrinivasaNo ratings yet
- SION InHouse Product DevelopmentsDocument1 pageSION InHouse Product DevelopmentsKalamchety Ravikumar SrinivasaNo ratings yet
- Fundamentals of Digital Signal Processing: Dr. D. K. MohantaDocument48 pagesFundamentals of Digital Signal Processing: Dr. D. K. MohantaKalamchety Ravikumar Srinivasa100% (1)
- Digital Control Systems - 2Document5 pagesDigital Control Systems - 2Kalamchety Ravikumar SrinivasaNo ratings yet
- Es Transforum 10-3Document24 pagesEs Transforum 10-3Kalamchety Ravikumar SrinivasaNo ratings yet
- A Bellman-Ford Approach To Energy Efficient Routing of EvDocument4 pagesA Bellman-Ford Approach To Energy Efficient Routing of EvKalamchety Ravikumar SrinivasaNo ratings yet
- Dr. R. Gowri Sankara Rao: Professor and Head of The Dept. Dept. of EEE MVGR College of Engineering, VizianagaramDocument17 pagesDr. R. Gowri Sankara Rao: Professor and Head of The Dept. Dept. of EEE MVGR College of Engineering, VizianagaramKalamchety Ravikumar SrinivasaNo ratings yet
- Lab Op5 Pid Oct10Document15 pagesLab Op5 Pid Oct10Kalamchety Ravikumar SrinivasaNo ratings yet
- FT110 FT210Document2 pagesFT110 FT210mikadahlNo ratings yet
- 1.017/1.010 Class 11 Multivariate Probability: Multiple Random VariablesDocument3 pages1.017/1.010 Class 11 Multivariate Probability: Multiple Random VariablesDr. Ir. R. Didin Kusdian, MT.No ratings yet
- Study of Rayleigh-B Enard-Brinkman Convection Using LTNE Model and Coupled, Real Ginzburg-Landau EquationsDocument8 pagesStudy of Rayleigh-B Enard-Brinkman Convection Using LTNE Model and Coupled, Real Ginzburg-Landau EquationsDebuNo ratings yet
- Compositional Analysis of Foods - Food Analysis - S.S. NielsenDocument2 pagesCompositional Analysis of Foods - Food Analysis - S.S. NielsenSyed Asim BachaNo ratings yet
- Test Schedule Summary.1709Document116 pagesTest Schedule Summary.1709Sharath ChandraNo ratings yet
- 066 LW Tensile Tester v2.0 PDFDocument4 pages066 LW Tensile Tester v2.0 PDFMarkusNo ratings yet
- 6.water Treatment and Make-Up Water SystemDocument18 pages6.water Treatment and Make-Up Water Systempepenapao1217100% (1)
- Automatic Sorting Machine Using Conveyor Belt: June 2015Document6 pagesAutomatic Sorting Machine Using Conveyor Belt: June 2015Vikashini GNo ratings yet
- Lecture Notes-1 - Physical and Mechanical Properties of Materials-2020Document11 pagesLecture Notes-1 - Physical and Mechanical Properties of Materials-2020Jesh KeerawellaNo ratings yet
- Effect of Core Materials On Stress Distribution of PostsDocument5 pagesEffect of Core Materials On Stress Distribution of PostsVikas DeepNo ratings yet
- Virtual Lab #2Document3 pagesVirtual Lab #2yumnakhalil11111No ratings yet
- Demagnetizing A Tape RecorderDocument3 pagesDemagnetizing A Tape RecorderSzilvester SzilvesterNo ratings yet
- Conversion Factors For Oilfield UnitsDocument12 pagesConversion Factors For Oilfield UnitsAfzal AktharNo ratings yet
- Asme B31.4Document130 pagesAsme B31.4chavico113No ratings yet
- Kemrex Pile Calculation: Hmc-Pp4 ProjectDocument15 pagesKemrex Pile Calculation: Hmc-Pp4 ProjectSurat WaritNo ratings yet
- Symmetry Relationships Between Crystal StructuresDocument349 pagesSymmetry Relationships Between Crystal StructuresRocio Iribarren VargasNo ratings yet
- Dynamic Stability of Thin-Walled Structures: A Semi-AnalyticalDocument244 pagesDynamic Stability of Thin-Walled Structures: A Semi-Analyticalnjm00175% (4)
- 05 Task Performance 1Document3 pages05 Task Performance 1human beingNo ratings yet
- A Machine Learning Approach To Facies Classification Using Well LogsDocument6 pagesA Machine Learning Approach To Facies Classification Using Well Logsherdissam1No ratings yet
- Schedule For Theory Examination (Even Sem.) - 2011-2012 B.Tech., First Year-Ii SemesterDocument66 pagesSchedule For Theory Examination (Even Sem.) - 2011-2012 B.Tech., First Year-Ii SemesterSheetal P. ManiNo ratings yet
- Learning GoalsDocument15 pagesLearning GoalsIir Mnemonis0% (7)
- Geology Lab 1Document5 pagesGeology Lab 1TufailAhmadNo ratings yet
- ProCam XL User Guide EnglishDocument17 pagesProCam XL User Guide EnglishApolloGRNo ratings yet
- Wire RopesDocument4 pagesWire RopesEjNo ratings yet
- E-Catalog For Butyl Adhesive Waterproof Tape SaDocument10 pagesE-Catalog For Butyl Adhesive Waterproof Tape SaVasilis EvangelidisNo ratings yet
- Dis ConnectorsDocument4 pagesDis ConnectorssaravanakumartbNo ratings yet
- Precious Metals Recovery From Cyanide Solution Using EMEW Technology V3 ...Document18 pagesPrecious Metals Recovery From Cyanide Solution Using EMEW Technology V3 ...Agung W. WidodoNo ratings yet
- Runout Mecanico y ElectricoDocument6 pagesRunout Mecanico y ElectricoJuan Pablo Chumba LaraNo ratings yet