Compensators For The Buck Converter: Design and Analysis
Compensators For The Buck Converter: Design and Analysis
Download as pdf or txt
You might also like
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- Average Current Mode Control For LLC SeriesDocument8 pagesAverage Current Mode Control For LLC SeriesKrishnaveni Subramani SNo ratings yet
- Buck Boost ConverterDocument13 pagesBuck Boost ConverterJithin Parappallichira ManiNo ratings yet
- Optimizing The Load Transient Response of The Buck ConverterDocument7 pagesOptimizing The Load Transient Response of The Buck ConverterNéstor BernalNo ratings yet
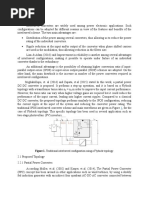
- Figure 1. Traditional Interleaved Configuration Using A Flyback TopologyDocument7 pagesFigure 1. Traditional Interleaved Configuration Using A Flyback TopologyaldyNo ratings yet
- Expt No. 03 - To Design and Test Op Amp Integrator For Given FrequenciesDocument7 pagesExpt No. 03 - To Design and Test Op Amp Integrator For Given FrequenciesPrakash Narkhede100% (1)
- Minimization The Current Ripple of A Three-Phase Buck+Boost PWM Unity Power Factor RectifierDocument6 pagesMinimization The Current Ripple of A Three-Phase Buck+Boost PWM Unity Power Factor RectifierHugo LeónNo ratings yet
- Current Mode Slope CompensationDocument11 pagesCurrent Mode Slope CompensationDaniel BiasiNo ratings yet
- Comparative AnalysisDocument6 pagesComparative AnalysisDrVikas Singh BhadoriaNo ratings yet
- RP P9788770229630C28Document10 pagesRP P9788770229630C28lokireddi kiran kumarNo ratings yet
- Digital Current Limiting Techniques For Switching Power Supplies PDFDocument9 pagesDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraNo ratings yet
- Internal and External Op-Amp Compensation - A Control-Centric TutorialDocument15 pagesInternal and External Op-Amp Compensation - A Control-Centric TutorialengsysNo ratings yet
- A Novel Switch Mode Dc-To-Ac Converter With Nonlinear Robust ControlDocument21 pagesA Novel Switch Mode Dc-To-Ac Converter With Nonlinear Robust Controlapi-19799369No ratings yet
- Conv DC-DC Paper ENglishDocument5 pagesConv DC-DC Paper ENglishpepe890305No ratings yet
- DC-DC Converter Tutorial: Application Note 2031Document10 pagesDC-DC Converter Tutorial: Application Note 2031Mou LaliNo ratings yet
- U-97 Application Note: Modelling, Analysis and Compensation of The Current-Mode ConverterDocument7 pagesU-97 Application Note: Modelling, Analysis and Compensation of The Current-Mode ConverterPowerranger2.0No ratings yet
- Ieee Current ModeDocument7 pagesIeee Current ModepqqpNo ratings yet
- A High Efficiency Boost Converter For TFT-LCD Bias SupplyDocument4 pagesA High Efficiency Boost Converter For TFT-LCD Bias SupplyHamid BoualiNo ratings yet
- Modelado DC DCDocument8 pagesModelado DC DCAndrés Vanegas GuillénNo ratings yet
- High Efficiency and High Power Factor Single-Stage Balanced Forward-Flyback ConverterDocument6 pagesHigh Efficiency and High Power Factor Single-Stage Balanced Forward-Flyback ConverterKarthik KumarNo ratings yet
- Solution KEE601Document36 pagesSolution KEE601ky708090100No ratings yet
- Flyback ConverterDocument19 pagesFlyback Convertergpalencia_1No ratings yet
- Simulation of Upqc FileDocument11 pagesSimulation of Upqc FiledineshprocksNo ratings yet
- A Space Vector-Based Rectifier Regulator For AC DC AC ConvertersDocument7 pagesA Space Vector-Based Rectifier Regulator For AC DC AC ConvertersSofia FrlNo ratings yet
- Factor KDocument10 pagesFactor Kmeaaa770822No ratings yet
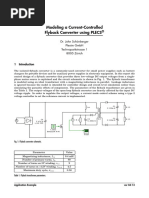
- Plecs FlybackDocument4 pagesPlecs FlybackBhargavNo ratings yet
- ThesisDocument75 pagesThesishodeegits9526No ratings yet
- A Stabilizing, High-Performance Controller For Input Series-Output Parallel ConvertersDocument12 pagesA Stabilizing, High-Performance Controller For Input Series-Output Parallel ConvertersDipanjan DasNo ratings yet
- Dynamic Modeling and Analysis of The Bidirectional DCDC Boost-Buck ConverterDocument40 pagesDynamic Modeling and Analysis of The Bidirectional DCDC Boost-Buck ConverterAndresSs NineNo ratings yet
- A Novel Control Method For Direct Interface Converters Used For DC and AC Power SuppliesDocument10 pagesA Novel Control Method For Direct Interface Converters Used For DC and AC Power SuppliesSherif M. DabourNo ratings yet
- Single-Inductor Multiple-Output DC-DC ConvertersDocument22 pagesSingle-Inductor Multiple-Output DC-DC Convertersvietanh_askNo ratings yet
- Definition of Power Converters: F. Bordry and D. AgugliaDocument29 pagesDefinition of Power Converters: F. Bordry and D. AgugliaL CHNo ratings yet
- A Unity Power Factor Converter Using HalfDocument14 pagesA Unity Power Factor Converter Using HalfLivia Faria PeresNo ratings yet
- Slidin Mode Research PaperDocument33 pagesSlidin Mode Research PaperAnimesh JainNo ratings yet
- A Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM StrategyDocument2 pagesA Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM Strategyskumar_61719No ratings yet
- Load Flow StudiesDocument30 pagesLoad Flow StudiesMary Morse100% (2)
- One Cycle ControlDocument9 pagesOne Cycle ControlNithin SebastianNo ratings yet
- Analysis of The Performance of A Flying-Capacitor Three Level Buck Converter TopologyDocument5 pagesAnalysis of The Performance of A Flying-Capacitor Three Level Buck Converter TopologyInternational Organization of Scientific Research (IOSR)No ratings yet
- Boost PDFDocument12 pagesBoost PDFchicotec1No ratings yet
- Ridley 1991Document10 pagesRidley 1991mounicapaluru_351524No ratings yet
- An Improved Distributed Control Strategy For Parallel InvertersDocument6 pagesAn Improved Distributed Control Strategy For Parallel InvertersMohamed BerririNo ratings yet
- Boost Converter BasicsDocument5 pagesBoost Converter BasicsRaja Sekhar BatchuNo ratings yet
- A Voltage-Mode PWM Buck Regulator With End-Point PredictionDocument5 pagesA Voltage-Mode PWM Buck Regulator With End-Point PredictionWen DwenNo ratings yet
- Input Impedance Analysis of Single-Phase PFC ConvertersDocument7 pagesInput Impedance Analysis of Single-Phase PFC ConvertersCem CanerenNo ratings yet
- Buck BoostDocument3 pagesBuck BoostVigneshwaran MuruganNo ratings yet
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Buck BoostDocument11 pagesBuck Boostkima lachgarNo ratings yet
- Interleaving Technique in Multiphase Buck & Boost ConverterDocument5 pagesInterleaving Technique in Multiphase Buck & Boost ConverterIDESNo ratings yet
- A Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitDocument10 pagesA Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitVeeraiah BodduNo ratings yet
- Very Wide Input Voltage Range-Flyback (90V To 600V AC)Document12 pagesVery Wide Input Voltage Range-Flyback (90V To 600V AC)senkum812002No ratings yet
- An Active Input Current Waveshaping With Zero Switching Losses For Three-Phase Circuit Using Power DiodeDocument3 pagesAn Active Input Current Waveshaping With Zero Switching Losses For Three-Phase Circuit Using Power DiodeIDESNo ratings yet
- Simulation and Experimental Results of 7-Level Inverter SystemDocument8 pagesSimulation and Experimental Results of 7-Level Inverter Systembacuoc.nguyen356No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- An 6104Document23 pagesAn 6104Özgür YılmazNo ratings yet
- Vissim/Opc: Application SheetDocument1 pageVissim/Opc: Application SheetÖzgür YılmazNo ratings yet
- Vissim/Knobs & Gauges: Application SheetDocument1 pageVissim/Knobs & Gauges: Application SheetÖzgür YılmazNo ratings yet
- RD 573Document30 pagesRD 573Özgür YılmazNo ratings yet
- Vissim/Analyze: Application SheetDocument1 pageVissim/Analyze: Application SheetÖzgür YılmazNo ratings yet
- Vissim/Motion: Application SheetDocument1 pageVissim/Motion: Application SheetÖzgür YılmazNo ratings yet
- Vissim/Real-Timepro: Application SheetDocument1 pageVissim/Real-Timepro: Application SheetÖzgür YılmazNo ratings yet
- Matlab 8Document6 pagesMatlab 8Robert RoigNo ratings yet
- 2015 - Hertjees - Variable Gain Motion Control of Wafer Scanners PDFDocument11 pages2015 - Hertjees - Variable Gain Motion Control of Wafer Scanners PDFAyman IsmailNo ratings yet
- Bode Plot UpdatedDocument43 pagesBode Plot UpdatedBen TinNo ratings yet
- EEE 324 - Lecture Note 4Document5 pagesEEE 324 - Lecture Note 4Jerry MashmanNo ratings yet
- Control SystemsDocument25 pagesControl Systemskakaka12No ratings yet
- Dytran Documentation TheoryDocument35 pagesDytran Documentation TheoryGeorges KouroussisNo ratings yet
- 30 Transfer Function and Frequency ResponseDocument54 pages30 Transfer Function and Frequency ResponseKARTHIK S SNo ratings yet
- Chapter 5 Part 2 Bode PlotDocument45 pagesChapter 5 Part 2 Bode PlotumarNo ratings yet
- 10ME82 16-17 (Control Engg.)Document30 pages10ME82 16-17 (Control Engg.)Sharanabasappa SajjanNo ratings yet
- Unit-3 Part-1 Cs Notes-MinDocument26 pagesUnit-3 Part-1 Cs Notes-MinSriram MekhaNo ratings yet
- Design of EMG SensorDocument12 pagesDesign of EMG SensorHannia MedinaNo ratings yet
- S2A Transfer Functions RLC and Filters v3BDocument78 pagesS2A Transfer Functions RLC and Filters v3BRamenKing12No ratings yet
- Control Systems Lab 4: Jayasinghe H. B. C. EN17409056Document16 pagesControl Systems Lab 4: Jayasinghe H. B. C. EN17409056BuddhiNo ratings yet
- Sistemas de Control para El Desarrollo de IngenieríaDocument23 pagesSistemas de Control para El Desarrollo de IngenieríajesusNo ratings yet
- Saini 2015Document6 pagesSaini 2015SaduMunisekharNo ratings yet
- Bode Plot RulesDocument5 pagesBode Plot RulesreporterrajiniNo ratings yet
- Experiment 6 Sinusoidal Steady State: ObjectiveDocument5 pagesExperiment 6 Sinusoidal Steady State: Objectiveahmed shahNo ratings yet
- Lecture - 2 - Digital Control SystemDocument77 pagesLecture - 2 - Digital Control Systemtadepeace23No ratings yet
- Homework 7 - SolutionsDocument13 pagesHomework 7 - SolutionsMuhamad ArifNo ratings yet
- IC6501 SCAD MSM by WWW - Learnengineering.inDocument223 pagesIC6501 SCAD MSM by WWW - Learnengineering.inKarthi BENo ratings yet
- Noc19 De04 Assignment Week 9Document4 pagesNoc19 De04 Assignment Week 9Sweta DashNo ratings yet
- Ltspice Sweep TutorialDocument8 pagesLtspice Sweep Tutorialrj_duffy0% (1)
- Hewlett-Packard JournalDocument16 pagesHewlett-Packard Journaldanilo espinozaNo ratings yet
- 2&3. Digital Controller DesignDocument75 pages2&3. Digital Controller Design243942821No ratings yet
- Rohini 46875836765Document2 pagesRohini 46875836765Shivam RaiNo ratings yet
- Eee4093 QFTDocument43 pagesEee4093 QFTJames GillardNo ratings yet
- Lab Report Lab # 10 Bode Plots: by Charles Browne Keddy Emmanuel Raynold LewisDocument5 pagesLab Report Lab # 10 Bode Plots: by Charles Browne Keddy Emmanuel Raynold LewisspiderhuntNo ratings yet
- AssignmentDocument12 pagesAssignmentSamuel TanNo ratings yet
- Electrical Most Important 150 MCQ PDF For Vizag MT ExamDocument43 pagesElectrical Most Important 150 MCQ PDF For Vizag MT ExamNaveen KumarNo ratings yet