World's Largest Science, Technology & Medicine Open Access Book Publisher
World's Largest Science, Technology & Medicine Open Access Book Publisher
Download as pdf or txt
You might also like
- Echo Cancellation in Audio Signal Using LMS AlgorithmDocument6 pagesEcho Cancellation in Audio Signal Using LMS AlgorithmVa SuNo ratings yet
- Applications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezDocument19 pagesApplications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezguyoaserNo ratings yet
- Version 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering AlgorithmsDocument7 pagesVersion 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering Algorithmstayyabkhan00No ratings yet
- Echo Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BDocument5 pagesEcho Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BPrabira Kumar SethyNo ratings yet
- Adaptive Filtering ApplicationsDocument410 pagesAdaptive Filtering Applications花玉良100% (1)
- Chameli Devi Institute of Technology & Management, IndoreDocument15 pagesChameli Devi Institute of Technology & Management, IndoreNazsh AslamNo ratings yet
- Active Noise Control Systems With The TMS320 Family: January 1998Document10 pagesActive Noise Control Systems With The TMS320 Family: January 1998Vasanth RajaNo ratings yet
- A Low Frequency Noise Cancellation Vlsi Circuit Design Using Lms Adaptive Filter For In-Ear Headphones.Document7 pagesA Low Frequency Noise Cancellation Vlsi Circuit Design Using Lms Adaptive Filter For In-Ear Headphones.ijire publicationNo ratings yet
- Active Noise Reduction Using LMS and FXLMS AlgoritDocument12 pagesActive Noise Reduction Using LMS and FXLMS AlgoritSahitya YadavNo ratings yet
- Noise Canceling in Audio Signal With Adaptive FilterDocument6 pagesNoise Canceling in Audio Signal With Adaptive FilterDiệp Xuân NamNo ratings yet
- Design and Analysis of A Digital Active Noise Control System For Headphones Implemented in An Arduino Compatible MicrocontrollerDocument5 pagesDesign and Analysis of A Digital Active Noise Control System For Headphones Implemented in An Arduino Compatible MicrocontrollerLeul SeyfuNo ratings yet
- Echo Cancellation Algorithms Using Adaptive Filters: A Comparative StudyDocument8 pagesEcho Cancellation Algorithms Using Adaptive Filters: A Comparative StudyidescitationNo ratings yet
- Echo Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoDocument25 pagesEcho Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoÈmøñ AlesandЯo KhanNo ratings yet
- ANC Based On Fuzzy Models, CA Silva, (7p)Document14 pagesANC Based On Fuzzy Models, CA Silva, (7p)hbambillNo ratings yet
- Adaptive Filter Application in Echo Cancellation System and Implementation Using FPGADocument13 pagesAdaptive Filter Application in Echo Cancellation System and Implementation Using FPGAZeyad Tareq Al SaroriNo ratings yet
- Real Time DSP: Professors: Eng. Julian Bruno Eng. Mariano Llamedo SoriaDocument29 pagesReal Time DSP: Professors: Eng. Julian Bruno Eng. Mariano Llamedo SoriaAli AkbarNo ratings yet
- E. M K. K. & & &Document4 pagesE. M K. K. & & &suryaNo ratings yet
- A F A E: Daptive Iltering Pplications XplainedDocument15 pagesA F A E: Daptive Iltering Pplications XplainedbermanNo ratings yet
- Active Noise Control: Open Problems and Challenges: July 2010Document7 pagesActive Noise Control: Open Problems and Challenges: July 2010Neamu ValentinNo ratings yet
- Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDocument9 pagesAcoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNo ratings yet
- Design and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDocument9 pagesDesign and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNo ratings yet
- SYSC5603 Project Report: Real-Time Acoustic Echo CancellationDocument15 pagesSYSC5603 Project Report: Real-Time Acoustic Echo CancellationqasimalikNo ratings yet
- Adaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethDocument7 pagesAdaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethIJERDNo ratings yet
- A Novel Method For The Application of Adaptive Filters For Active Noise Control SystemDocument5 pagesA Novel Method For The Application of Adaptive Filters For Active Noise Control SystemEditor IJRITCCNo ratings yet
- HIGH PRECISION FM DSPDocument20 pagesHIGH PRECISION FM DSPTamanatao Hadji AliNo ratings yet
- Anexo 2 - Plantilla IEEEDocument7 pagesAnexo 2 - Plantilla IEEEeduar Martelo SierraNo ratings yet
- Morales L.G. (Ed.) Adaptive Filtering ApplicationsDocument410 pagesMorales L.G. (Ed.) Adaptive Filtering ApplicationsArash TorkamanNo ratings yet
- A Review of Active Noise Control AlgorithmsDocument5 pagesA Review of Active Noise Control AlgorithmsPiper OntuNo ratings yet
- ANCDocument24 pagesANCManish GaurNo ratings yet
- Adaptive Noise CancellerDocument9 pagesAdaptive Noise CancellerThomas mortonNo ratings yet
- Adaptive Digital FiltersDocument10 pagesAdaptive Digital Filtersfantastic05No ratings yet
- Echo Cancellation Using The Lms AlgorithmDocument8 pagesEcho Cancellation Using The Lms AlgorithmVương Công ĐịnhNo ratings yet
- FULLTEXT01Document66 pagesFULLTEXT01Vishnu PriyaNo ratings yet
- BhgyuiDocument5 pagesBhgyuiRup JoshiNo ratings yet
- Springer 1Document7 pagesSpringer 1Dimple BansalNo ratings yet
- Noise Canceling in Audio Signal With Adaptive Filter: 2 Problem FormulationDocument4 pagesNoise Canceling in Audio Signal With Adaptive Filter: 2 Problem Formulationgoogle_chrome1No ratings yet
- Average FilteringDocument22 pagesAverage Filtering7204263474No ratings yet
- Progress ReportDocument17 pagesProgress Reportkavita gangwarNo ratings yet
- ANC System For Noisy SpeechDocument9 pagesANC System For Noisy SpeechsipijNo ratings yet
- Gcet Ec Maa 20 44 48Document40 pagesGcet Ec Maa 20 44 48Krupesh ShahNo ratings yet
- Virtual Harmonic Analyser in LabVIEWDocument6 pagesVirtual Harmonic Analyser in LabVIEWBiljana RisteskaNo ratings yet
- Noise Cancellation Using Adaptive Filter"Document5 pagesNoise Cancellation Using Adaptive Filter"kavita gangwarNo ratings yet
- IntroductionDocument31 pagesIntroductionwhizkidNo ratings yet
- Documention TheoryDocument72 pagesDocumention TheorySaNtosh KomakulaNo ratings yet
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDocument7 pagesDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokNo ratings yet
- VHDL Noise CancellerDocument8 pagesVHDL Noise Cancellert.sin48100% (1)
- Efficient Active Noise Cancellation ForDocument5 pagesEfficient Active Noise Cancellation ForSubham BeheraNo ratings yet
- A Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingDocument5 pagesA Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingArash TorkamanNo ratings yet
- Adaptive FFiltering With Averaging-Based Algorithmfor Feedforward ANC Systems, MT Akhtar, 2004, (4p)Document4 pagesAdaptive FFiltering With Averaging-Based Algorithmfor Feedforward ANC Systems, MT Akhtar, 2004, (4p)hbambillNo ratings yet
- Adaptive Clutter Cancellation Techniques For PassiDocument29 pagesAdaptive Clutter Cancellation Techniques For PassinethraNo ratings yet
- Biomedical Time Series Processing and Analysis Methods - The Case of EMDDocument21 pagesBiomedical Time Series Processing and Analysis Methods - The Case of EMDlucianbejanNo ratings yet
- IEEE PAPER FXLMS OptDocument6 pagesIEEE PAPER FXLMS Optedwinsuarez1404No ratings yet
- Fpga Implementation of Noise Cancellatio PDFDocument8 pagesFpga Implementation of Noise Cancellatio PDFLuis Oliveira SilvaNo ratings yet
- Hardware Implementation of Adaptive Noise Cancellation Over DSP Kit TMS320C6713Document12 pagesHardware Implementation of Adaptive Noise Cancellation Over DSP Kit TMS320C6713AI Coordinator - CSC JournalsNo ratings yet
- Kalman Filters For Parameter Estimation of Nonstationary SignalsDocument21 pagesKalman Filters For Parameter Estimation of Nonstationary Signalshendra lamNo ratings yet
- Shiroishi - Bearing Condition Diagnostics Via Vibration and Acoustic Emission MeasurementsDocument13 pagesShiroishi - Bearing Condition Diagnostics Via Vibration and Acoustic Emission MeasurementsTudor CostinNo ratings yet
- Weiner FilterDocument35 pagesWeiner FilterSreekanth PagadapalliNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Emerson Field Tools Quick Start GuideDocument88 pagesEmerson Field Tools Quick Start GuideSanti AgoNo ratings yet
- Dräger Polytron 5000 Junction Box: Assembly InstructionsDocument12 pagesDräger Polytron 5000 Junction Box: Assembly InstructionsSanti AgoNo ratings yet
- Fisher R FIELDVUE™ DVC6000 SIS Digital Valve Controllers For Safety Instrumented System (SIS) Solutions Instruction Manual (Supported)Document176 pagesFisher R FIELDVUE™ DVC6000 SIS Digital Valve Controllers For Safety Instrumented System (SIS) Solutions Instruction Manual (Supported)Jhofre OjedaNo ratings yet
- 8085 Instruction SetDocument12 pages8085 Instruction SetSanti AgoNo ratings yet
- Performing Active Noise Control and Acoustic Experiments RemotelyDocument10 pagesPerforming Active Noise Control and Acoustic Experiments RemotelySanti AgoNo ratings yet
- Djendi 2012Document16 pagesDjendi 2012Santi AgoNo ratings yet
- Active Noise Control Systems Algorithms PDFDocument7 pagesActive Noise Control Systems Algorithms PDFSanti Ago0% (1)
- Active Noise ControlDocument21 pagesActive Noise ControlSanti AgoNo ratings yet
- Study Master Technology Grade 9 Teacher S GuideDocument184 pagesStudy Master Technology Grade 9 Teacher S Guidetheod4059No ratings yet
- Components ListDocument1 pageComponents Listvenugopalan srinivasanNo ratings yet
- Antenna Lab#3Document12 pagesAntenna Lab#3Naveed SultanNo ratings yet
- Bloomberg 27-Inch Flat Panel Display BFP200-27 FixedDocument6 pagesBloomberg 27-Inch Flat Panel Display BFP200-27 Fixedanon_45433537No ratings yet
- Microprocessor and Interfacing - Question Paper May 2016 - Electronics & Telecomm (Semester 4) - Gujarat Technological University (GTU)Document4 pagesMicroprocessor and Interfacing - Question Paper May 2016 - Electronics & Telecomm (Semester 4) - Gujarat Technological University (GTU)YESHUDAS MUTTUNo ratings yet
- Modicon M251 Logic Controller: Hardware GuideDocument108 pagesModicon M251 Logic Controller: Hardware GuidekubikNo ratings yet
- PDF Datasheet T5833 8.5x11Document2 pagesPDF Datasheet T5833 8.5x11Alan OtoniNo ratings yet
- Solution of Tutorial 2 - Uncontrolled Rectifier CircuitsDocument15 pagesSolution of Tutorial 2 - Uncontrolled Rectifier CircuitsBalestier HillNo ratings yet
- Module 1.Ppt NetworkDocument55 pagesModule 1.Ppt NetworkbijukumargNo ratings yet
- Acer Aspire 5737Z Service-ManualDocument188 pagesAcer Aspire 5737Z Service-ManualGuilherme MartinsNo ratings yet
- DIGIEVER NVR User Manual ENG PDFDocument281 pagesDIGIEVER NVR User Manual ENG PDFManolo Fernandez CarrilloNo ratings yet
- IES - Electronics Engineering - Control SystemDocument66 pagesIES - Electronics Engineering - Control SystemWaliullah Panhwar100% (1)
- TransformerDocument2 pagesTransformerabuzar12533No ratings yet
- Dual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument2 pagesDual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltRobertNo ratings yet
- Parallax Control&Protocolo PS2Document15 pagesParallax Control&Protocolo PS2Cristian EcheniqueNo ratings yet
- Quiz2-ECE209 F09 SolnsDocument1 pageQuiz2-ECE209 F09 SolnsrosediodesNo ratings yet
- 006-2-EE 330 Digital Signal ProcessingDocument2 pages006-2-EE 330 Digital Signal Processingbilal nagoriNo ratings yet
- 60 TOP MOST NETWORK THEOREMS - Electrical Engineering Multiple Choice Questions and AnswersDocument6 pages60 TOP MOST NETWORK THEOREMS - Electrical Engineering Multiple Choice Questions and Answersrose maryNo ratings yet
- Nte 312Document3 pagesNte 312Fernando AndersNo ratings yet
- Gas Gauge IC With Alarm Output: ApplicationsDocument28 pagesGas Gauge IC With Alarm Output: Applications123No ratings yet
- Test 2 SolutionsDocument5 pagesTest 2 Solutionselvin 2wordsNo ratings yet
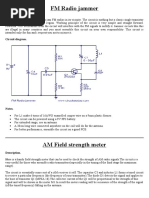
- FM Radio Jammer: DescriptionDocument4 pagesFM Radio Jammer: DescriptionnickususNo ratings yet
- P-N JunctionDocument9 pagesP-N Junctionhemnphysic91No ratings yet
- DVR 2000eDocument101 pagesDVR 2000eDavid GoldenNo ratings yet
- STATCOMDocument3 pagesSTATCOMViraj Viduranga MuthugalaNo ratings yet
- Lag 665Document6 pagesLag 665Radu PaulNo ratings yet
- Simple PLL, Including The MATLAB Code For PLL and Its TheoryDocument4 pagesSimple PLL, Including The MATLAB Code For PLL and Its TheoryFabio FabozziNo ratings yet
- Surface Mount Device IdentificationDocument8 pagesSurface Mount Device Identificationbill1022No ratings yet
- MB N2 DatasheetDocument12 pagesMB N2 Datasheettebeica2No ratings yet
- 74LS112Document4 pages74LS112Rick CastilloNo ratings yet