Negative Sequence Transformation: W1 W2 W3 W4 W5 W6
Negative Sequence Transformation: W1 W2 W3 W4 W5 W6
Download as pdf or txt
You might also like
- Kirchhoffs Law Problems and SolutionsDocument3 pagesKirchhoffs Law Problems and SolutionsSpencer HayesNo ratings yet
- A Dozen Ways To Measure Fluid Level and How They Work - SensorsDocument14 pagesA Dozen Ways To Measure Fluid Level and How They Work - SensorsmeetsushelNo ratings yet
- Multi MachineDocument19 pagesMulti MachineAllen Siril NethalaNo ratings yet
- BJT Gibert MultiplierDocument5 pagesBJT Gibert MultiplierJyoti GoyalNo ratings yet
- Module 5: DC-AC Converters: Lecture 14: DC-AC Inverter For EV and HEV ApplicationsDocument34 pagesModule 5: DC-AC Converters: Lecture 14: DC-AC Inverter For EV and HEV ApplicationsNagarajanNo ratings yet
- PSCH 9 Load FlowDocument63 pagesPSCH 9 Load FlowPanagiotis Geor100% (1)
- Auto TransformerDocument5 pagesAuto TransformerAugy HaerudyNo ratings yet
- Experiment No.1Document6 pagesExperiment No.1vinoNo ratings yet
- EXPERIMENT 6 - Voltage and Current Divider Circuit Design ConsiderationsDocument5 pagesEXPERIMENT 6 - Voltage and Current Divider Circuit Design ConsiderationsLea VillafuerteNo ratings yet
- A.C. Circiuits NotesDocument38 pagesA.C. Circiuits NotesbenjadiditNo ratings yet
- Load FlowDocument770 pagesLoad FlowS K PrajapatNo ratings yet
- Woldia University: A Non Ideal TransformerDocument24 pagesWoldia University: A Non Ideal TransformerKANDEGAMA H.R. (BET18077)No ratings yet
- Unit 05: Single Phase DC-AC Converter (Transistor Based)Document20 pagesUnit 05: Single Phase DC-AC Converter (Transistor Based)vaibhav bodkheNo ratings yet
- EE2006D Topic 9Document9 pagesEE2006D Topic 9Athul RameshNo ratings yet
- TD TransMonoDocument11 pagesTD TransMonoRaouf OuazibNo ratings yet
- Anna University Examination Questions: EE6201-Circuit Theory May - 2015Document7 pagesAnna University Examination Questions: EE6201-Circuit Theory May - 2015Anonymous yO7rcec6vuNo ratings yet
- 1st Year - Basic Electrical EngineeringDocument182 pages1st Year - Basic Electrical EngineeringMurughesh MurughesanNo ratings yet
- Transformers PDFDocument6 pagesTransformers PDFOrlando CalderasNo ratings yet
- Lecture - 5 Electrical PowerDocument9 pagesLecture - 5 Electrical Powersuka baca bukuNo ratings yet
- Lecture 4Document30 pagesLecture 4uoaliyuNo ratings yet
- Alternating Current CircuitsDocument10 pagesAlternating Current CircuitsElvis ArguellesNo ratings yet
- Lecture 12 Per Unit Calculation and Modeling of ApparatusDocument8 pagesLecture 12 Per Unit Calculation and Modeling of ApparatusMir AamirNo ratings yet
- 1 PH Autotransformer Em1Document8 pages1 PH Autotransformer Em1Ahmed M H Al-YousifNo ratings yet
- Ee07lab Experiment AutotransformerDocument5 pagesEe07lab Experiment AutotransformerPido, Patricia LaineNo ratings yet
- Basic Electrical Engineering BEE1101Document101 pagesBasic Electrical Engineering BEE1101DimitriNo ratings yet
- NETWORK ANALYSIS Chap.8 TWO PORT NETWORK & NETWORK FUNCTIONS PDFDocument34 pagesNETWORK ANALYSIS Chap.8 TWO PORT NETWORK & NETWORK FUNCTIONS PDFsudarshan poojaryNo ratings yet
- Network Analysis-Two Port Network & Network FunctionsDocument34 pagesNetwork Analysis-Two Port Network & Network Functionsanjugadu100% (2)
- Chapter 8 Two Port Network & Network Functions: Learning OutcomesDocument34 pagesChapter 8 Two Port Network & Network Functions: Learning OutcomesKarim Ullah PW ELE BATCH 22No ratings yet
- 1 TransformerDocument4 pages1 TransformerFarhan MasudNo ratings yet
- Method of (Circuit) AnalysisDocument36 pagesMethod of (Circuit) AnalysisA.K.M.TOUHIDUR RAHMANNo ratings yet
- Ladores Report-5Document12 pagesLadores Report-5Andrea Jane SalamatNo ratings yet
- Notes - TransformersDocument7 pagesNotes - TransformersGabrielle Mc LeanNo ratings yet
- Single Phase TransformerDocument10 pagesSingle Phase Transformerঅন্বেষা সেনগুপ্তNo ratings yet
- Elect MC 1 Chap-2 Lecture-5Document18 pagesElect MC 1 Chap-2 Lecture-5gopal sapkotaNo ratings yet
- 5 Kirchhoff's LawsDocument13 pages5 Kirchhoff's LawsMohamed AhmedNo ratings yet
- Experiment 6: Kirchhoff's Law Rachel Perry Lab Partners: N/A Date Performed: 14 July 2018 1635 Hours PHY 112 C11Document19 pagesExperiment 6: Kirchhoff's Law Rachel Perry Lab Partners: N/A Date Performed: 14 July 2018 1635 Hours PHY 112 C11Samira Viloria OchoaNo ratings yet
- Network Theorems ExperimentDocument3 pagesNetwork Theorems ExperimentReddyvari Venugopal100% (1)
- Chapter11 - Electricity WorkshopDocument12 pagesChapter11 - Electricity Workshopazyad8246No ratings yet
- Definition of Terms: 1. Node 2. Junction 3. Branch 4. Loop 5. Mesh 6. Voltage DropDocument26 pagesDefinition of Terms: 1. Node 2. Junction 3. Branch 4. Loop 5. Mesh 6. Voltage DropYuan MoralesNo ratings yet
- Lec - 1 - FEE 2Document28 pagesLec - 1 - FEE 2RUSLANNo ratings yet
- Elect MC 1 Chap-2 Lecture-8Document12 pagesElect MC 1 Chap-2 Lecture-8gopal sapkotaNo ratings yet
- Basic Electrical DiscussionDocument157 pagesBasic Electrical Discussionseul jichuNo ratings yet
- Transmission: SystemsDocument48 pagesTransmission: SystemsAlain JimeneaNo ratings yet
- UNIT-1 DC Circuit Analysis Concept of NetworkDocument13 pagesUNIT-1 DC Circuit Analysis Concept of NetworkVikash TiwariNo ratings yet
- Ex3-1 AnswersDocument3 pagesEx3-1 AnswersLeila ShahverdiyevaNo ratings yet
- DC PrinciplesDocument18 pagesDC PrinciplesJOSPHAT YEGONNo ratings yet
- Single-Phase Transformers: 6. Insulating DC Circuits From AC CircuitsDocument21 pagesSingle-Phase Transformers: 6. Insulating DC Circuits From AC CircuitsLin ChongNo ratings yet
- HW2 SolutionDocument10 pagesHW2 Solution劉德信No ratings yet
- RCC Institute of Information Technology Continuous Assessment - 1 (CA1) Academic Session: 2023-24 (Odd Sem)Document8 pagesRCC Institute of Information Technology Continuous Assessment - 1 (CA1) Academic Session: 2023-24 (Odd Sem)sreejitmondal1No ratings yet
- 2 B PV Cell 2Document12 pages2 B PV Cell 2Tahsin IbtidaNo ratings yet
- Lecture 08Document29 pagesLecture 08amitNo ratings yet
- Extracted IDocument14 pagesExtracted ImohibharNo ratings yet
- Three Phase Circuits-1p PDFDocument30 pagesThree Phase Circuits-1p PDFBuse YakınNo ratings yet
- Current TransformersDocument24 pagesCurrent TransformersArif KhanNo ratings yet
- Im 2Document36 pagesIm 2divya.babuNo ratings yet
- Bee Lab ManualDocument43 pagesBee Lab ManualShivansh SahuNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- 14.12 Protection of Transformers: Protective RelaysDocument1 page14.12 Protection of Transformers: Protective RelaysragupaNo ratings yet
- Automatic Bathroom Light With Back-Up Lamp - Full Project AvailableDocument2 pagesAutomatic Bathroom Light With Back-Up Lamp - Full Project AvailableragupaNo ratings yet
- Ug Table 2017Document2 pagesUg Table 2017ragupaNo ratings yet
- Extracted Pages From Electrical - UG Core Course SyllabiDocument1 pageExtracted Pages From Electrical - UG Core Course SyllabiragupaNo ratings yet
- Electrical Power Systems Wadhwa 15Document1 pageElectrical Power Systems Wadhwa 15ragupaNo ratings yet
- Electrical Power Systems Wadhwa 16Document1 pageElectrical Power Systems Wadhwa 16ragupaNo ratings yet
- Electrical Power Systems Wadhwa 13Document1 pageElectrical Power Systems Wadhwa 13ragupaNo ratings yet
- Electrical Power Systems Wadhwa 12Document1 pageElectrical Power Systems Wadhwa 12ragupaNo ratings yet
- Electrical Power Systems Wadhwa 3Document1 pageElectrical Power Systems Wadhwa 3ragupaNo ratings yet
- Electrical Power Systems Wadhwa 9Document1 pageElectrical Power Systems Wadhwa 9ragupaNo ratings yet
- Electrical Power Systems Wadhwa 6Document1 pageElectrical Power Systems Wadhwa 6ragupaNo ratings yet
- Electrical Power Systems Wadhwa 6Document1 pageElectrical Power Systems Wadhwa 6ragupaNo ratings yet
- 2Document1 page2ragupaNo ratings yet
- 2Document1 page2ragupaNo ratings yet
- 1Document1 page1ragupaNo ratings yet
- Electrical Power Systems Wadhwa 8Document1 pageElectrical Power Systems Wadhwa 8ragupaNo ratings yet
- Performance of Lines: Definition: by Performance of Lines Is Meant The Determination of Efficiency and Regulation ofDocument1 pagePerformance of Lines: Definition: by Performance of Lines Is Meant The Determination of Efficiency and Regulation ofragupaNo ratings yet
- F HG I KJ: Performance of LinesDocument1 pageF HG I KJ: Performance of LinesragupaNo ratings yet
- ZIF dsPIC30Fxxx PDFDocument1 pageZIF dsPIC30Fxxx PDFjbrunobNo ratings yet
- LCD TV Plasma TV: Owner'S ManualDocument100 pagesLCD TV Plasma TV: Owner'S ManualAdir SantosNo ratings yet
- Physics ProjectDocument22 pagesPhysics ProjectllamaNo ratings yet
- LG 65UF6800-UA Chassis LA5ZYDocument58 pagesLG 65UF6800-UA Chassis LA5ZYJafisson Joanas De AmorimNo ratings yet
- STM32 H103 ManualDocument17 pagesSTM32 H103 ManualviniciusmoritaNo ratings yet
- Valves and Actuators Catalog North America F 27855 7 PDFDocument444 pagesValves and Actuators Catalog North America F 27855 7 PDFAlvaro YépezNo ratings yet
- Please Find These O/pDocument29 pagesPlease Find These O/pInder ChauhanNo ratings yet
- Modeling and Parameter Estimation of Synchronous Machine - GR LekhemaDocument33 pagesModeling and Parameter Estimation of Synchronous Machine - GR LekhemaRatoka LekhemaNo ratings yet
- Papaers Solution OF Power System Analysis & SimulationDocument14 pagesPapaers Solution OF Power System Analysis & Simulationmsthacker0% (1)
- CV - Juan Dela Cruz (Sample CV For CEA)Document2 pagesCV - Juan Dela Cruz (Sample CV For CEA)Bea Vanette DuranteNo ratings yet
- Microprocessors Mid ExamDocument3 pagesMicroprocessors Mid Examkinfe_teka100% (3)
- HOCHIKI UL CatalogueDocument16 pagesHOCHIKI UL Cataloguearyan sharmaNo ratings yet
- CONTACTORDocument6 pagesCONTACTORGenrry EchaccayaNo ratings yet
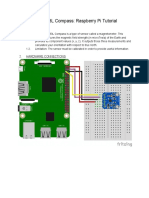
- hmc5883l Compass TutorialDocument7 pageshmc5883l Compass Tutorialapi-248437787No ratings yet
- IPC P01 Z02 SCH 2022Document17 pagesIPC P01 Z02 SCH 2022Rostislav NikitinNo ratings yet
- DL1 User Manual - Ver 3Document36 pagesDL1 User Manual - Ver 3chusolNo ratings yet
- Parts List: RADIUS P110 SeriesDocument10 pagesParts List: RADIUS P110 Seriesjulio76pyNo ratings yet
- Ofdma: LTE Air Interface CourseDocument63 pagesOfdma: LTE Air Interface CourseAkhtar KhanNo ratings yet
- Sirius Eng Web Rev07.08.2014Document8 pagesSirius Eng Web Rev07.08.2014keyurNo ratings yet
- Service Manual: Power AmplifierDocument24 pagesService Manual: Power AmplifierbuchebrNo ratings yet
- E12686-0000-9002-01-09 Consumer List PDFDocument67 pagesE12686-0000-9002-01-09 Consumer List PDFthanh100% (1)
- Alignment & AdjustmentDocument12 pagesAlignment & Adjustmentfalco2010No ratings yet
- 4 - Half Wave RectifierDocument3 pages4 - Half Wave RectifiertesfayNo ratings yet
- Pioneer Sc-07 Sc-05 SMDocument227 pagesPioneer Sc-07 Sc-05 SMClaudio PereiraNo ratings yet
- An Improved Valley-Fill Passive Power-Factor-CorrectionDocument8 pagesAn Improved Valley-Fill Passive Power-Factor-Correctionpdseetharam009No ratings yet
- LYNX Audio Amplifier 275W 4 OhmiDocument11 pagesLYNX Audio Amplifier 275W 4 OhmiDanut777750% (2)
- Aa 120Document28 pagesAa 120Sergio Dal Dosso100% (1)
- Von Duprin PS914 Power Supply Installation Instructions 106443Document4 pagesVon Duprin PS914 Power Supply Installation Instructions 106443DedyTo'tedongNo ratings yet