
Basics of Process Control
Uploaded by
Amirah Suhaila ZakariaBasics of Process Control
Uploaded by
Amirah Suhaila ZakariaB–1
Fundamentals
Part B
Fundamentals
Chapter 1 Fundamentals of closed-loop control technology
1.1 What is closed-loop control technology? . . . . . . . . . B1-2
1.2 What is a system? . . . . . . . . . . . . . . . . . . . . . B1-4
1.3 Open-loop and closed-loop control . . . . . . . . . . . . B1-6
1.4 Basic terminology . . . . . . . . . . . . . . . . . . . . . B1-9
1.5 Controlled system . . . . . . . . . . . . . . . . . . . . B1-12
1.5.1 Description of the dynamic response
of a controlled system . . . . . . . . . . . . . . . . . . B1-14
1.6 Controllers . . . . . . . . . . . . . . . . . . . . . . . . B1-16
1.6.1 Control response . . . . . . . . . . . . . . . . . . . . B1-17
1.6.2 Time response of a controller . . . . . . . . . . . . . . B1-18
1.6.3 Technical details of controllers . . . . . . . . . . . . . B1-20
1.7 Mode of operation of various controller types . . . . . B1-21
1.7.1 The proportional controller . . . . . . . . . . . . . . . . B1-21
1.7.2 The integral-action controller . . . . . . . . . . . . . . B1-23
1.7.3 The PI controller . . . . . . . . . . . . . . . . . . . . . B1-24
1.7.4 The PD controller . . . . . . . . . . . . . . . . . . . . B1-25
1.7.5 The PID controller . . . . . . . . . . . . . . . . . . . . B1-26
1.8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . B1-27
Chapter 2 Projecting of automated systems
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . B2-2
2.1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . B2-2
2.1.2 Configuration of small-scale experimental system . . . . B2-2
2.1.3 Overview of project design process . . . . . . . . . . . . B2-4
2.2 Core project design – Fundamental methodology for
the project design of automation systems . . . . . . . . B2-7
2.2.1 Comments regarding project configuration . . . . . . . . B2-7
2.2.2 Tender specification - Performance specification . . . . . B2-9
2.2.3 PI flow diagram . . . . . . . . . . . . . . . . . . . . . B2-11
2.2.4 EMCS block diagrams . . . . . . . . . . . . . . . . . . B2-19
2.2.5 Notes regarding the project design of auxiliary power . B2-38
2.2.6 Notes regarding assembly project design . . . . . . . . B2-42
Festo Didactic • Process Control System
B–2
Fundamentals
2.3 Closed control loop synthesis . . . . . . . . . . . . . . . B2-43
2.3.1 Introductory comments . . . . . . . . . . . . . . . . . . B2-43
2.3.2 Process analysis / Model configuration . . . . . . . . . . B2-43
2.3.3 Controller configuration and parameterisation . . . . . . B2-73
2.4 Selection of automation devices . . . . . . . . . . . . . . B2-83
2.4.1 Introductory comments . . . . . . . . . . . . . . . . . . B2-83
2.4.2 Essential fundamentals . . . . . . . . . . . . . . . . . . B2-85
2.5 Process protection measures . . . . . . . . . . . . . . B2-102
Chapter 3 Commissioning and maintenance
3.1 Commissioning of
process and automation system . . . . . . . . . . . . . B3-2
3.1.1 Introductory comments – Commissioning strategy . . . . B3-2
3.1.2 Connection of auxiliary power (Part 1 and Part 2) . . . . B3-4
3.1.3 Testing of closed control loops, binary control systems
and safety devices . . . . . . . . . . . . . . . . . . . . . B3-10
3.1.4 Establishing the stand-by mode
of the technical process . . . . . . . . . . . . . . . . . . B3-11
3.2 Upkeep of technical process systems
(small-scale experimental system) . . . . . . . . . . . . B3-12
3.3 Fault finding and error handling
– Damage prevention training . . . . . . . . . . . . . . B3-13
Chapter 4 Fault finding
4.1 What is meant by maintenance? . . . . . . . . . . . . . B4-2
4.1.1 Service . . . . . . . . . . . . . . . . . . . . . . . . . . . B4-3
4.1.2 Inspection . . . . . . . . . . . . . . . . . . . . . . . . . B4-3
4.1.3 Repairs . . . . . . . . . . . . . . . . . . . . . . . . . . . B4-4
4.2 Systematic repairs in the event of malfunction . . . . . . B4-5
4.2.1 Prerequisite for systematic repairs . . . . . . . . . . . . B4-5
4.2.2 Procedure . . . . . . . . . . . . . . . . . . . . . . . . . B4-7
4.3 Fault finding . . . . . . . . . . . . . . . . . . . . . . . . B4-7
4.3.1 Systematic fault finding . . . . . . . . . . . . . . . . . . B4-8
4.3.2 Fault documentation . . . . . . . . . . . . . . . . . . . . B4-9
4.3.3 Fault analysis . . . . . . . . . . . . . . . . . . . . . . . B4-11
4.4 Final analysis . . . . . . . . . . . . . . . . . . . . . . . B4-12
Process Control System • Festo Didactic
B1 – 1
Closed-loop control
Chapter 1
Fundamentals of closed-loop
control technology
Festo Didactic • Process Control System
B1 – 2
Closed-loop control
This chapter outlines the differences between closed-loop and open-
loop control and gives an introduction to closed-loop control technology.
The control loop is explained, enabling you to carry out the following:
Recognize closed-loop control systems
Analyze a control loop
Understand the interaction of the individual systems
Set a controller
Evaluate control response
1.1 What is closed-loop control technology?
Variables such as pressure, temperature or flow-rate often have to be
set on large machines or systems. This setting should not change when
faults occur. Such tasks are undertaken by a closed-loop controller.
Control engineering deals with all problems that occur in this connec-
tion.
The controlled variable is first measured and an electrical signal is crea-
ted to allow an independent closed-loop controller to control the vari-
able.
The measured value in the controller must then be compared with the
desired value or the desired-value curve. The result of this comparison
determines any action that needs to be taken.
Finally a suitable location must be found in the system where the con-
trolled variable can be influenced (for example the actuator of a heating
system). This requires knowledge of how the system behaves.
Closed-loop control technology attempts to be generic – that is, to be
applicable to various technologies. Most text books describe this with
the aid of higher mathematics. This chapter describes the fundamentals
of closed-loop control technology with minimum use of mathematics.
Process Control System • Festo Didactic
B1 – 3
Closed-loop control
Reference variable
In closed-loop control the task is to keep the controlled variable at the
desired value or to follow the desired-value curve. This desired value is
known as the reference variable.
Controlled variable
This problem occurs in many systems and machines in various techno-
logies. The variable that is subject to control is called the controlled
variable. Examples of controlled variables are:
Pressure in a pneumatic accumulator
Pressure of a hydraulic press
Temperature in a galvanizing bath
Flow-rate of coolant in a heat exchanger
Concentration of a chemical in a mixing vessel
Feed speed of a machine tool with electrical drive
Manipulated variable
The controlled variable in any system can be influenced. This influence
allows the controlled variable to be changed to match the reference
variable (desired value). The variable influenced in this way is called
the manipulated variable. Examples of manipulated variable are:
Position of the venting control valve of a air reservoir
Position of a pneumatic pressure-control valve
Voltage applied to the electrical heater of a galvanizing bath
Position of the control valve in the coolant feed line
Position of a valve in a chemical feed line
Voltage on the armature of a DC motor
Controlled system
There are complex relationships between the manipulated variable and
the controlled variable. These relationships result from the physical in-
terdependence of the two variables. The part of the control that descri-
bes the physical processes is called the controlled system.
Festo Didactic • Process Control System
B1 – 4
Closed-loop control
1.2 What is a system?
System
The controlled system has an input variable and an output variable. Its
response is described in terms of dependence of the output variable on
the input variable. These responses between one or several variables
can normally be described using mathematical equations based on phy-
sical laws. Such physical relationships can be determined by experi-
mentation.
Controlled systems are shown as a block with the appropriate input and
output variables (see Fig. B1-1).
Input variable Output variable
System
Fig. B1-1:
Block diagram of a
controlled system
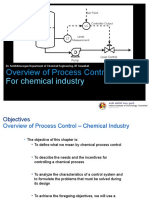
Example
A water bath is to be maintained at a constant temperature. The water
bath is heated by a helical pipe through which steam flows. The flow
rate of steam can be set by means of a control valve. Here the control
system consists of positioning of the control valve and the temperature
of the water bath. This result in a controlled system with the input vari-
able "temperature of water bath" and the output variable "position of
control valve" (see Fig. B1-2).
Water
Steam
Control valve
Fig. B1-2:
Water bath Helical heating pipe
controlled system
Process Control System • Festo Didactic
B1 – 5
Closed-loop control
The following sequences take place within the controlled system:
The position of the control valve affects the flow rate of steam through
the helical pipe.
The steam flow-rate determines the amount of heat passed to the
water bath.
The temperature of the bath increases if the heat input is greater
than the heat loss and drops if the heat input is less than the heat
loss.
These sequences give the relationship between the input and output
variables.
Advantage of creating a system
The advantage of creating a system with input and output variables and
representing the system as a block is that this representation separates
the problem from the specific equipment used and allows a generic
view. You will soon see that all sorts of controlled systems demonstrate
the same response and can therefore be treated in the same way.
Section B 1.4 contains more information on the behaviour of controlled
systems and their description.
Festo Didactic • Process Control System
B1 – 6
Closed-loop control
1.3 Open-loop and closed-loop control
Having defined the term "controlled system" it only remains to give defi-
nitions of closed-loop control as contained in standards. First it is useful
to fully understand the difference between open-loop control and
closed-loop control.
Open-loop control
German standard DIN 19 226 defines open-loop control as a process
taking place in a system where by one or more variables in the form of
input variables exert influence on other variables in the form of output
variables by reason of the laws which characterize the system.
The distinguishing feature of open-loop control is the open nature of its
action, that is, the output variable does not have any influence on the
input variable.
Example
Volumetric flow is set by adjusting a control valve. At constant applied
pressure, the volumetric flow is directly influenced by the position of the
control valve. This relationship between control valve setting and volu-
metric flow can be determined either by means of physical equation or
by experiment. This results in the definition of a system consisting of
the "valve" with the output variable "volumetric flow" and the input vari-
able "control valve setting" (see Fig. B1.3).
l/h
Applied pressure
p [bar]
Measuring
device
Control valve
Fig B1-3: Volumeric flow
3
Open-loop control of V [m /s]
volumetric flow setting
Process Control System • Festo Didactic
B1 – 7
Closed-loop control
This system can be controlled by adjusting the control valve. This al-
lows the desired volumetric flow to be set.
However, if the applied pressure fluctuates, the volumetric flow will also
fluctuate. In this open system, adjustment must be made manually. If
this adjustment is to take place automatically, the system must have
closed-loop control.
Closed-loop control
DIN 19 226 defines closed-loop control as a process where the control-
led variable is continuously monitored and compared with the reference
variable. Depending on the result of this comparison, the input variable
for the system is influenced to adjust the output variable to the desired
value despite any disturbing influences. This feedback results in a
closed-loop action.
This theoretical definition can be clarified using the example of volume-
tric flow control.
Deviation
Example
The volumetric flow (the output variable) is to be maintained at the pre-
determined value of the reference variable. First a measurement is
made and this measurement is converted into an electrical signal. This
signal is passed to the controller and compared with the desired value.
Comparison takes place by subtracting the measured value from the
desired value. The result is the deviation.
Manipulating element
In order to automatically control the control valve with the aid of the
deviation, an electrical actuating motor or proportional solenoid is requi-
red. This allows adjustment of the controlled variable. This part is called
the manipulating element (see Fig. B1-4).
Festo Didactic • Process Control System
B1 – 8 google search ===images===valve "flow rate"
Closed-loop control
Measuring element
Applied pressure Control valve Volumetric flow
3
p [bar] V [m /s]
Manipulated variable
Fig. B1-4: Reference variable
Closed-loop control
of volumetric flow
The controller now passes a signal to the manipulating element de-
pendent on the deviation. If there is a large negative deviation, that is
the measured value of the volumetric flow is greater than the desired
value (reference variable) the valve is closed further. If there is a large
positive deviation, that is the measured value is smaller than the desi-
red value, the valve is opened further.
Setting of the output variable is normally not ideal:
If the intervention is too fast and too great, influence at the input end
Describe some of the of the system is too large. This results in great fluctuations at the
control engineering output.
problems faced by
closed-loop control
If influence is slow and small, the output variable will only approxi-
engineer mate to the desired value.
In addition, different types of systems (control system) require different
control strategy. Systems that respond slowly must be adjusted careful-
ly and with forethought. This describes some of the control engineering
problems faced by the closed-loop control engineer.
Design of a closed-loop control requires the following steps:
Briefly describe the
Determine manipulated variable (thus defining the controlled system)
steps required in the Determine the behaviour of the controlled system
design of a closed-
Determine control strategy for the controlled system (behaviour of
loop control system .
the "controller" system)
Select suitable measuring and manipulating elements.
Process Control System • Festo Didactic
B1 – 9
Closed-loop control
1.4 Basic terminology
In Section B 1.3 we look at the difference between open-loop and
closed-loop control using the example of volumetric flow for a control
valve. In addition we look at the basic principle of closed-loop control
and basic terminology. Using this example, let’s take a closer look at
closed-loop control terminology.
Controlled variable x
The aim of any closed-loop control is to maintain a variable at a desired volumetric flow
value or on a desired-value curve. The variable to be controlled is
known as the controlled variable x. In our example it is the volumetric
flow.
Manipulated variable y
Automatic closed-loop control can only take place if the machine or
drive current for
system offers a possibility for influencing the controlled variable. The solenoid positioning
variable which can be changed to influence the controlled variable is
called the manipulated variable y. In our example of volumetric flow, the
manipulated variable is the drive current for the positioning solenoid.
Disturbance variable z
Disturbances occur in any controlled system. Indeed, disturbances are applied pressure
often the reason why a closed-loop control is required. In our example, changes
volumetric flow
the applied pressure changes the volumetric flow and thus requires a
which in turn
change in the control valve setting. Such influences are called distur- changes
bance variables z. valve setting
The controlled system is the part of a controlled machine or plant in control
which the controlled variable is to be maintained at the value of the
reference variable. The controlled system can be represented as a
system with the controlled variable as the output variable and the mani-
pulated variable as the input variable. In the example of the volumetric
flow control, the pipe system through which gas flows and the control
valve formed the control system.
Festo Didactic • Process Control System
B1 – 10
Closed-loop control
Reference variable w
The reference variable is also known as the set point. It represents the
desired value of the controlled variable. The reference variable can be
constant or may vary with time. The instantaneous real value of the
controlled variable is called the actual value w.
Deviation xd
The result of a comparison of reference variable and controlled variable
is the deviation xd:
xd = w - x
Control response
Control response indicates how the controlled system reacts to changes
to the input variable. Determination of the control response is one of the
aims of closed-loop control technology.
Controller
What are the main The controller has the task of holding the controlled variable as near as
functions of a controller in possible to the reference variable. The controller constantly compares
a controlled system? the value of the controlled variable with the value of the reference vari-
able. From this comparison and the control response, the controller de-
termines and changes the value of the manipulating variable (see Fig.
B1-5).
Manipulated
Controlled variable x - Deviation xd Control variable y
response
(actual value) (algorithm)
+
Fig. B1-5: Reference variable w
Functional principle of (desired value)
a closed-loop control
Process Control System • Festo Didactic
B1 – 11
Closed-loop control
Manipulating element and servo-drive
The manipulating element adjusts the controlled variable. The manipu-
lating element is normally actuated by a special servo drive. A servo
drive is required if it is not possible for the controller to actuate the
manipulating element directly. In our example of volumetric flow control,
the manipulating element is the control valve.
Measuring element
In order to make the controlled variable accessible to the controller, it
must be measured by a measuring element (sensor, transducer) and
converted into a physical variable that can be processed by the control-
ler is an input.
Closed loop
The closed loop contains all components necessary for automatic clo-
sed-loop control (see Fig. B1-6).
Controlled Controlled variable x
system (actual value)
Manipulated
variable y
Controller Reference variable w
(desired value) Fig. B1-6:
Block diagram
of a control loop
Festo Didactic • Process Control System
B1 – 12
Closed-loop control
1.5 Controlled system
The controlled system is the part of a machine or plant in which the
controlled variable is to be maintained at the desired value and in which
manipulated variables compensate for disturbance variables. Input va-
riables to the controlled system include not only the manipulated vari-
able, but also disturbance variables.
Before a controller can be defined for a controlled system, the behav-
iour of the controlled system must be known. The control engineer is
not interested in technical processes within the controlled system, but
only in system behaviour.
Dynamic response of a system
The dynamic response of a system (also called time response) is an
important aspect. It is the time characteristic of the output variable (con-
trolled variable) for changes in the input variable. Particularly important
is behaviour when the manipulated variable is changed.
The control engineer must understand that nearly every system has a
characteristic dynamic response.
Example
In the example of the water bath in Section B1.2, a change in the
steam valve setting will not immediately change the output variable
temperature. Rather, the heat capacity of the entire water bath will
cause the temperature to slowly "creep" to the new equilibrium (see
Fig. B1-7).
Valve Temperature
setting water bath
Water bath
Valve
setting [%]
100
50
Time t
Temperature
water bath [°C] dynamic response===time response
80
70
60
Fig. B1-7: 50
Time response of 40
the controlled system Time t
"water bath"
Process Control System • Festo Didactic
B1 – 13
Closed-loop control
Example
In the example of a valve for volumetric flow control, the dynamic re-
sponse is rapid. Here, a change in the valve setting has an immediate
effect on flow rate so that the change in the volumetric flow rate output
signal almost immediately follows the input signal for the change of the
valve setting (see B1-8).
Valve Volumetric
Valve
setting flow
Valve
setting [%]
100
50
Time t
Volumetric
3
flow [m /s] dynamic response===time response
80
70
60
50
40
Fig. B1-8:
Time t
Time response of the
controlled system "valve"
Festo Didactic • Process Control System
B1 – 14
Closed-loop control
1.5.1 Description of the dynamic response of a
controlled system
In the examples shown in Fig. B1-7 and Fig. B1-8, the time response
was shown assuming a sudden change in input variable. This is a com-
monly used method of establishing the time response of system.
Step response
The response of a system to a sudden change of the input variable is
called the step response. Every system can be characterized by its step
response. The step response also allows a system to be described with
mathematical formulas.
Dynamic response
This description of a system is also known as dynamic response. Fig.
B1-9 demonstrates this. Here the manipulated variable y is suddenly
increased (see left diagram). The step response of the controlled vari-
able x is a settling process with transient overshoot.
y x
t t
Manipulated variable y Controlled Controlled variable x
system
Fig. B1-9:
Step response
Process Control System • Festo Didactic
B1 – 15
Closed-loop control
Equilibrium
Another characteristic of a system is its behaviour in equilibrium, the
static behaviour.
Static behaviour
Static behaviour of a system is reached when none of the variables
change with time. Equilibrium is reached when the system has settled.
This state can be maintained for an unlimited time.
The output variable is still dependent on the input variable – this de-
pendence is shown by the characteristic of a system.
Example
The characteristic of the "valve" system from our water bath example
shows the relationship between volumetric flow and valve position (see
Fig. B1-10).
3
Volumetric flow [m /s]
3
at applied pressure p
Fig. B1-10:
1 2 Valve setting y [mm] Characteristic curve of
the "valve" system
The characteristic shows whether the system is a linear or non-linear
system. If the characteristic is a straight line, the system is linear. In our
"valve" system, the characteristic is non-linear.
Many controlled systems that occur in practice are non-linear. However,
they can often be approximated by a linear characteristic in the range in
which they are operated.
Festo Didactic • Process Control System
B1 – 16
Closed-loop control
1.6 Controllers
The previous section dealt with the controlled system - the part of the
system which is controlled by a controller. This section looks at the
controller.
The controller is the device in a closed-loop control that compares the
measured value (actual value) with the desired value, and then calcu-
lates and outputs the manipulated variable. The above section showed
that controlled systems can have very different responses. There are
systems which respond quickly, systems that respond very slowly and
systems with storage property.
For each of these controlled systems, changes to the manipulated
variable y must take place in a different way. For this reason there are
various types of controller each with its own control response. The con-
trol engineer has the task of selecting the controller with the most suit-
able control response for the controlled system.
Process Control System • Festo Didactic
B1 – 17
Closed-loop control
1.6.1 Control response
Control response is the way in which the controller derives the manipu-
lated variable from the system deviation. There are two broad catego-
ries: continuous-action controllers and non-continuous-action control-
lers.
Continous-action controller
The manipulated variable of the continuous-
action controller changes continuously de-
pendent on the system deviation. Controllers
of this type give the value of the system de-
viation as a direct actuating signal to the
manipulating element. An example of this
type of controller is the centrifugal governor.
It changes its moment of inertia dependent
on speed, and thus has a direct influence on
speed.
Non-continous-action controller
The manipulated variable of a non-continuous-action controller can only
be changed in set steps. The best-known non-continuous-action con-
troller is the two-step control that can only assume the conditions "on"
or "off".
An example is the thermostat of an iron. It switches the electric current
for the heating element on or off depending on the temperature.
Temperature
Bi-metallic switch
Heating
element
This section only deals with continuous-action controllers as these are
more commonly used in automation technology. Further, the fundamen-
tals of closed-loop control technology can be better explained using the
continuous-action controller as an example.
Festo Didactic • Process Control System
B1 – 18
Closed-loop control
1.6.2 Time response of a controller
Every controlled system has its own time response. This time response
depends on the design of the machine or system and cannot be influ-
enced by the control engineer. The time response of the controlled
system must be established through experiment or theoretical analysis.
The controller is also a system and has its own time response. This
time response is specified by the control engineer in order to achieve
good control performance.
The time response of a continuous-action controller is determined by
three components:
Proportional component (P component)
Integral component (I component)
Differential component (D component)
The above designations indicate how the manipulated variable is calcu-
lated from the system deviation.
Proportional controller
In the proportional controller, the ma-
nipulated variable output is proportio- Input system deviation
nal to the system deviation. If the
system deviation is large, the value t
of the manipulated variable is large.
If the system deviation is small, the manipulated variable
value of the manipulated variable is Output
small. As the manipulated variable is
proportional to the system deviation,
the manipulated variable is only pre- t
sent if there is a system deviation.
For this reason, a proportional controller alone cannot achieve a system
deviation of zero. In this case no manipulated variable will be present
and there would therefore be no control.
Process Control System • Festo Didactic
B1 – 19
Closed-loop control
Integral-action controller
An integral-action controller adds the
system deviation over time, that is it
is integrated. For example, if a
Input system deviation system deviation is constantly
present, the value of the manipulated
variable continues to increase as it is
t dependent on summation over time.
However, as the value of the mani-
manipulated variable pulated variable continues to increa-
Output
se, the system deviation decreases.
This process continues until the sy-
t stem deviation is zero. Integral-action
controllers or integral components in
controllers are therefor used to avoid
permanent system deviation.
Differential-action controller
The differential component evaluates
the speed of change of the system
system deviation
Input deviation. This is also called differen-
tiation of the system deviation. If the
system deviation is changing fast,
t the manipulated variable is large. If
the system deviation is small, the va-
manipulated variable lue of manipulated variable is small.
Output
A controller with D component alone
does not make any sense, as a ma-
t nipulated variable would only be pre-
sent during change in the system de-
viation.
A controller can consist of a single component, for example a P control-
ler or an I controller. A controller can also be a combination of several
components - the most common form of continuous-action controller is
the PID controller.
Festo Didactic • Process Control System
B1 – 20
Closed-loop control
1.6.3 Technical details of controllers
In automation technology controllers are almost exclusively electrical or
electronic. Although mechanical and pneumatic controllers are often
shown as examples in text books, they are hardly ever found in modern
systems.
for voltage 0 ... 10V -10 ... +10V
for current 0 ... 20mA 4 ... 20mA
Electrical and electronic controllers work with electrical input and output
signals. The transducers are sensors which convert physical variables
into voltage or current. The manipulating elements and servo drives are
operated by current or voltage outputs. Theoretically, there is no limit to
the range of these signals. In practice, however, standard ranges have
become established for controllers:
Internal processing of signals in the controller is either analog with ope-
rational amplifier circuits or digital with microprocessor systems
In circuits with operational amplifiers, voltages and currents are pro-
cessed directly in the appropriate modules.
In digital processing, analog signals are first converted into digital
signals. After calculation of the manipulated variable in the micropro-
cessor, the digital value is converted back into an analog value.
Although theoretically these two types of processing have to be dealt
with very differently, there is no difference in the practical application of
classical controllers.
Process Control System • Festo Didactic
B1 – 21
Closed-loop control
1.7 Mode of operation of various controller types
This section explains the control response of various controller types
and the significance of parameters. As in the explanation of controlled
systems, the step response is used for this description. The input vari-
able to the controller is the system deviation – that is, the difference
between the desired value and the actual value of the controlled vari-
able.
1.7.1 The proportional controller
Proportional controller
In the case of the proportional controller, the actuation signal is propor-
tional to the system deviation. If the system deviation is large, the value
of the manipulated variable is large. If the system deviation is small, the
value of the manipulated variable is small. The time response of the P
controller in the ideal state is exactly the same as the input variable
(see Fig. B1-11).
xd y
y0
x0
t t
System deviation xd Manipulated variable y
Controller
Fig. B1-11:
Time response of
the P controller
The relationship of the manipulated variable to the system deviation is
the proportional coefficient or the proportional gain. These are designa-
ted by xp, Kp or similar. These values can be set on a P controller. It
determines how the manipulated variable is calculated from the system
deviation. The proportional gain is calculated as:
Kp = y0 / x0
Festo Didactic • Process Control System
B1 – 22
Closed-loop control
If the proportional gain is too high, the controller will undertake large
changes of the manipulating element for slight deviations of the control-
led variable. If the proportional gain is too small, the response of the
controller will be too weak resulting in unsatisfactory control.
A step in the system deviation will also result in a step in the output
variable. The size of this step is dependent on the proportional gain. In
practice, controllers often have a delay time, that is a change in the
manipulated variable is not undertaken until a certain time has elapsed
after a change in the system deviation. On electrical controllers, this
delay time can normally be set.
An important property of the P controller is that as a result of the rigid
relationship between system deviation and manipulated variable, some
system deviation always remains. The P controller cannot compensate
this remaining system deviation.
Process Control System • Festo Didactic
B1 – 23
Closed-loop control
1.7.2 The I controller
Integral-action controller
The I controller adds the system deviation over time. It integrates the
system deviation. As a result, the rate of change (and not the value) of
the manipulated variable is proportional to the system deviation. This is
demonstrated by the step response of the I controller: if the system
deviation suddenly increases, the manipulated variable increases conti-
nuously. The greater the system deviation, the steeper the increase in
the manipulated variable (see Fig. B1-12).
xd y
t t
System deviation xd Manipulated variable y
Controller
Fig. B1-12:
Time response of
the I controller
For this reason the I controller is not suitable for totally compensating
remaining system deviation. If the system deviation is large, the mani-
pulated variable changes quickly. As a result, the system deviation be-
comes smaller and the manipulated variable changes more slowly until
equilibrium is reached.
Nonetheless, a pure I controller is unsuitable for most controlled
systems, as it either causes oscillation of the closed loop or it responds
too slowly to system deviation in systems with a long time response. In
practice there are hardly any pure I controllers.
Festo Didactic • Process Control System
B1 – 24
Closed-loop control
1.7.3 The PI controller
PI controller
The PI controller combines the behaviour of the I controller and P con-
troller. This allows the advantages of both controller types to be combi-
ned: fast reaction and compensation of remaining system deviation. For
this reason, the PI controller can be used for a large number of control-
led systems. In addition to proportional gain, the PI controller has a
further characteristic value that indicates the behaviour of the I compo-
nent: the reset time (integral-action time).
Reset time
The reset time is a measure for how fast the controller resets the mani-
pulated variable (in addition to the manipulated variable generated by
the P component) to compensate for a remaining system deviation. In
other words: the reset time is the period by which the PI controller is
faster than the pure I controller. Behaviour is shown by the time re-
sponse curve of the PI controller (see Fig. B1-13).
xd y
t t
Tr
Tr = reset time
System deviation xd Manipulated variable y
Fig. B1-13: Controller
Time response of
the PI controller
The reset time is a function of proportional gain Kp as the rate of
change of the manipulated variable is faster for a greater gain. In the
case of a long reset time, the effect of the integral component is small
as the summation of the system deviation is slow. The effect of the
integral component is large if the reset time is short.
The effectiveness of the PI controller increases with increase in gain Kp
and increase in the I-component (i.e., decrease in reset time). However,
if these two values are too extreme, the controller’s intervention is too
coarse and the entire control loop starts to oscillate. Response is then
not stable. The point at which the oscillation begins is different for every
controlled system and must be determined during commissioning.
Process Control System • Festo Didactic
B1 – 25
Closed-loop control
1.7.4 The PD controller
PD controller
The PD controller consists of a combination of proportional action and
differential action. The differential action describes the rate of change of
the system deviation.
The greater this rate of change – that is the size of the system devia-
tion over a certain period – the greater the differential component. In
addition to the control response of the pure P controller, large system
deviations are met with very short but large responses. This is expres-
sed by the derivative-action time (rate time).
Derivative-action time
The derivative-action time Td is a measure for how much faster a PD
controller compensates a change in the controlled variable than a pure
P controller. A jump in the manipulated variable compensates a large
part of the system deviation before a pure P controller would have
reached this value. The P component therefore appears to respond
earlier by a period equal to the rate time (see Fig. B1-14).
xd y
t t
Td
Td = derivative-action time
System deviation xd Manipulated variable y
Controller Fig. B1-14:
Time response of
the PD controller
Two disadvantages result in the PD controller seldom being used. First-
ly, it cannot completely compensate remaining system deviations.
Secondly, a slightly excessive D component leads quickly to instability
of the control loop. The controlled system then tends to oscillate.
Festo Didactic • Process Control System
B1 – 26
Closed-loop control
1.7.5 PID controller
PID controller
In addition to the properties of the PI controller, the PID controller is
complemented by the D component. This takes the rate of change of
the system deviation into account.
If the system deviation is large, the D component ensures a momentary
extremely high change in the manipulated variable. While the influence
of the D component falls of immediately, the influence of the I compo-
nent increases slowly. If the change in system deviation is slight, the
behaviour of the D component is negligible (see Section B1.6.2).
This behaviour has the advantage of faster response and quicker com-
pensation of system deviation in the event of changes or disturbance
variables. The disadvantage is that the control loop is much more prone
to oscillation and that setting is therefore more difficult.
Fig. B1-15 shows the time response of a PID controller.
xd y
t t
Tr Td Tr = reset time
Td = derivative-action time
System deviation xd Manipulated variable y
Fig. B1-15: Controller
Time response of
the PID controller
Derivative-action time
As a result of the D component, this controller type is faster than a P
controller or a PI controller. This manifests itself in the derivative-action
time Td. The derivative-action time is the period by which a PID control-
ler is faster than the PI controller.
Process Control System • Festo Didactic
B1 – 27
Closed-loop control
1.8 Summary
Here is a summary of the most important points to be taken into ac-
count when solving control problems.
1. Assignment of controlled variables
Which machine or plant variable is the controlled variable, reference
variable, manipulated variable etc. Where and how do disturbance
variables occur? The selection of sensors and actuators is based on
these factors.
2. Division of the control problem into systems
Where is the controlled variable measured? Where can the system
be influenced? What is the nature of the individual systems?
3. Controlled system
Where is the controlled variable to be adjusted to the desired value?
What is the time response of the controlled system (slow or fast)?
The choice of controller response is based on these factors.
4. Controller
What type of control response is required? What time response must
the controller have, particularly with regard to fault conditions? What
values must the controller parameters have?
5. Controller type
What type of controller must be implemented? Does the time re-
sponse and controlled system require a P, I, PI or PID controller?
Festo Didactic • Process Control System
B1 – 28
Closed-loop control
Process Control System • Festo Didactic
You might also like
- MRC Controller Data Communications ManualNo ratings yetMRC Controller Data Communications Manual104 pages
- Centaur XP Interface Specification ManualNo ratings yetCentaur XP Interface Specification Manual292 pages
- Process Control Fundamentals ISA Standards100% (1)Process Control Fundamentals ISA Standards84 pages
- So Many Tuning Rules, So Little Time: Control Talk ColumnsNo ratings yetSo Many Tuning Rules, So Little Time: Control Talk Columns36 pages
- Practical Process Control Textbook 20060612100% (1)Practical Process Control Textbook 20060612296 pages
- Process Control Instrumentation, Troubleshooting and Problem SolvingNo ratings yetProcess Control Instrumentation, Troubleshooting and Problem Solving4 pages
- Process Control Fundamentals: Revision Date: January 2020100% (1)Process Control Fundamentals: Revision Date: January 2020202 pages
- 4-20 MA Process Control Loops - DCS Control Loop - Inst ToolsNo ratings yet4-20 MA Process Control Loops - DCS Control Loop - Inst Tools8 pages
- Siemens Equipment Usage Guide Imdl: 1/28/2004 Last Updated: 9/13/04No ratings yetSiemens Equipment Usage Guide Imdl: 1/28/2004 Last Updated: 9/13/0429 pages
- Part 5: Advanced Control + Case StudiesNo ratings yetPart 5: Advanced Control + Case Studies52 pages
- PLC Motor Operation Based On Time Cycle SequenceNo ratings yetPLC Motor Operation Based On Time Cycle Sequence6 pages
- Industrial Communications: - by Rajeshkumar Modi100% (2)Industrial Communications: - by Rajeshkumar Modi74 pages
- L1 - 2 - Types of Industrial Automation Systems100% (2)L1 - 2 - Types of Industrial Automation Systems31 pages
- .Process Instrument and Control (Week1 - 2) - 1681659856000No ratings yet.Process Instrument and Control (Week1 - 2) - 1681659856000230 pages
- M. Tech. Process Control and Instrumentation EngineeringNo ratings yetM. Tech. Process Control and Instrumentation Engineering31 pages
- Advanced Surface Movement Guidance and Control Systems (A-SMGCS) ManualNo ratings yetAdvanced Surface Movement Guidance and Control Systems (A-SMGCS) Manual83 pages
- CS2302 Computer Networks Anna University Engineering Question Bank 4 UNo ratings yetCS2302 Computer Networks Anna University Engineering Question Bank 4 U48 pages
- IEC 60870-5-103 Master Protocol Profile 2No ratings yetIEC 60870-5-103 Master Protocol Profile 222 pages
- Network Performance Definitions AnalysisNo ratings yetNetwork Performance Definitions Analysis61 pages
- How Hard Can It Be? Designing and Implementing A Deployable Multipath TCPNo ratings yetHow Hard Can It Be? Designing and Implementing A Deployable Multipath TCP14 pages
- CS601 Short Notes (Handouts) For Final by AmirNo ratings yetCS601 Short Notes (Handouts) For Final by Amir76 pages
- Application of BSM370 Communication Protocol: SerialNo ratings yetApplication of BSM370 Communication Protocol: Serial2 pages
- Understanding Carrier Ethernet Throughput - V14No ratings yetUnderstanding Carrier Ethernet Throughput - V1422 pages

























































































- So Many Tuning Rules, So Little Time: Control Talk ColumnsSo Many Tuning Rules, So Little Time: Control Talk Columns
- Process Control Instrumentation, Troubleshooting and Problem SolvingProcess Control Instrumentation, Troubleshooting and Problem Solving
- Process Control Fundamentals: Revision Date: January 2020Process Control Fundamentals: Revision Date: January 2020
- 4-20 MA Process Control Loops - DCS Control Loop - Inst Tools4-20 MA Process Control Loops - DCS Control Loop - Inst Tools
- Siemens Equipment Usage Guide Imdl: 1/28/2004 Last Updated: 9/13/04Siemens Equipment Usage Guide Imdl: 1/28/2004 Last Updated: 9/13/04
- .Process Instrument and Control (Week1 - 2) - 1681659856000.Process Instrument and Control (Week1 - 2) - 1681659856000
- M. Tech. Process Control and Instrumentation EngineeringM. Tech. Process Control and Instrumentation Engineering
- Advanced Surface Movement Guidance and Control Systems (A-SMGCS) ManualAdvanced Surface Movement Guidance and Control Systems (A-SMGCS) Manual
- CS2302 Computer Networks Anna University Engineering Question Bank 4 UCS2302 Computer Networks Anna University Engineering Question Bank 4 U
- How Hard Can It Be? Designing and Implementing A Deployable Multipath TCPHow Hard Can It Be? Designing and Implementing A Deployable Multipath TCP
- Application of BSM370 Communication Protocol: SerialApplication of BSM370 Communication Protocol: Serial