0% found this document useful (0 votes)
197 viewsAsynchronous and Synchronous Assignment
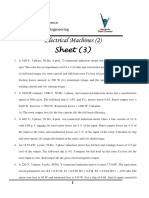
This document contains 17 multi-part problems related to analyzing induction motors. The problems cover topics like determining motor parameters from test data, calculating torque, current and slip under various operating conditions, designing induction motor specifications, and analyzing induction machines for traction applications.
Uploaded by
KaranCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
197 viewsAsynchronous and Synchronous Assignment
This document contains 17 multi-part problems related to analyzing induction motors. The problems cover topics like determining motor parameters from test data, calculating torque, current and slip under various operating conditions, designing induction motor specifications, and analyzing induction machines for traction applications.
Uploaded by
KaranCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 3