Uno R3 Dengan Tampilan LCD: Pengaturan Kecepatan Putaran Motor DC Menggunakan Arduino
Uno R3 Dengan Tampilan LCD: Pengaturan Kecepatan Putaran Motor DC Menggunakan Arduino
Download as pdf or txt
You might also like
- Chapter 15Document71 pagesChapter 15Mogaka LucasNo ratings yet
- Motor, Electric Traction and Electrical Control Trainer YL-195Document41 pagesMotor, Electric Traction and Electrical Control Trainer YL-195jhgffdfdffNo ratings yet
- DC Motor Are of 3 Types They Are .Document12 pagesDC Motor Are of 3 Types They Are .Krishna100% (3)
- Conveyor Control Using Programmable Logic ControllerDocument7 pagesConveyor Control Using Programmable Logic ControllerdanwNo ratings yet
- Optical CouplerDocument28 pagesOptical CouplerHai Tạ LóNo ratings yet
- DC MotorDocument102 pagesDC MotorTestNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- DC Motor Modeling and Control Using Backstepping Technique p01 12Document12 pagesDC Motor Modeling and Control Using Backstepping Technique p01 12Ali AltahirNo ratings yet
- Implementation of Boost Converter Applied For DC Motor DriveDocument51 pagesImplementation of Boost Converter Applied For DC Motor DriveLeri FirdianNo ratings yet
- GeneratorsDocument95 pagesGeneratorsRaja RamachandranNo ratings yet
- DC Motors and TypesDocument13 pagesDC Motors and TypesLjubisa RaimovicNo ratings yet
- Generators: Working, Types and Advantages Principle of GeneratorDocument8 pagesGenerators: Working, Types and Advantages Principle of GeneratorReal IDNo ratings yet
- Analysis of Thyristor Controlled Induction Motors Based VVCFDocument4 pagesAnalysis of Thyristor Controlled Induction Motors Based VVCFDipti NagareNo ratings yet
- Projectreportmain PDFDocument36 pagesProjectreportmain PDFAnshul TailorNo ratings yet
- BLDC Motors: BY T.Vadivelan Ap/Eee SincetDocument23 pagesBLDC Motors: BY T.Vadivelan Ap/Eee Sincetvetri velNo ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- BLDC MotorsDocument5 pagesBLDC Motorskinngofdarrkness66No ratings yet
- Brushless DC MotorDocument24 pagesBrushless DC Motorpartha DasNo ratings yet
- 2653all - 5th Semester - Electrical EngineeringDocument64 pages2653all - 5th Semester - Electrical EngineeringTreeNo ratings yet
- Electric Drives - Brushless DC and Reluctance MotorsDocument5 pagesElectric Drives - Brushless DC and Reluctance Motorsfauzi endraNo ratings yet
- Module 3 - Shunt DC MotorDocument12 pagesModule 3 - Shunt DC MotorMARY JOY MAGAWAYNo ratings yet
- Photovoltaic Based Brushless DC Motor Closed Loop Drive For Electric VehicleDocument7 pagesPhotovoltaic Based Brushless DC Motor Closed Loop Drive For Electric VehicleMani KandanNo ratings yet
- ECEL LAB#3 AngeladaDocument19 pagesECEL LAB#3 AngeladaAlehamarie AngeladaNo ratings yet
- ed-c univ.solve paperDocument25 pagesed-c univ.solve paperBhavesh IngleNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- 098stut8489034 002Document94 pages098stut8489034 002bijalmehtaNo ratings yet
- DC Machine-1Document37 pagesDC Machine-1faqhrulNo ratings yet
- Bldcmotorsppt 160414054724Document23 pagesBldcmotorsppt 160414054724SwapnilMahajanNo ratings yet
- Control Lab Manual 01Document11 pagesControl Lab Manual 01doppler9effectNo ratings yet
- 4 Types of DC Motors&GeneratorsDocument8 pages4 Types of DC Motors&GeneratorsAbdulhakim TREKINo ratings yet
- LMH_chapter7_DC Machines_StudentsDocument84 pagesLMH_chapter7_DC Machines_Studentstc16112004No ratings yet
- DC Drives Basic Operation PrinciplesDocument3 pagesDC Drives Basic Operation Principleskadirov31No ratings yet
- EMS Lab Manual Ver 1.0 (Fall 2016)Document69 pagesEMS Lab Manual Ver 1.0 (Fall 2016)Fahad MahmoodNo ratings yet
- Be3251 Beee QBDocument3 pagesBe3251 Beee QBMr MovieNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- Robotics AnswersDocument3 pagesRobotics Answersshinde.siddharthNo ratings yet
- TarekDocument24 pagesTarekعبدالله نعمان آلزبيديNo ratings yet
- Electrical Machine 7-26-2016Document94 pagesElectrical Machine 7-26-2016Engr. Raheel khanNo ratings yet
- DC ServomotorDocument3 pagesDC ServomotorAshutosh Prakash MishraNo ratings yet
- ECNG-4010 Lecture 05Document37 pagesECNG-4010 Lecture 05Abel BatuNo ratings yet
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- Chopper Operation Using PsimDocument7 pagesChopper Operation Using Psimhussein100% (1)
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanysybaritzNo ratings yet
- Direct Torque Control in AC Drive TechnologyDocument4 pagesDirect Torque Control in AC Drive Technologyragab abulmagdNo ratings yet
- Salman Salu ElectricalDocument9 pagesSalman Salu ElectricalAzeem AsgharNo ratings yet
- Enercon-Experiment 1Document10 pagesEnercon-Experiment 1Aldrin QuiambaoNo ratings yet
- Electric MachinesDocument4 pagesElectric Machinesمحمد حسین فیض اللهیNo ratings yet
- Industrial Machines IiDocument26 pagesIndustrial Machines IiIsaac KimaruNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Jurnal Simetrik Vol.9, No.2, Desember 2019Document11 pagesJurnal Simetrik Vol.9, No.2, Desember 2019Aris SaputraNo ratings yet
- Basic of ElectricalDocument10 pagesBasic of ElectricalAbdul RazzakNo ratings yet
- Em I NotesDocument44 pagesEm I NotesNANDHAKUMAR ANo ratings yet
- Aiet 383 Plcs 04Document13 pagesAiet 383 Plcs 04talha 8byt TalhaNo ratings yet
- Universal Moto1Document12 pagesUniversal Moto1Saim MollahNo ratings yet
- Four QuadrantDocument45 pagesFour QuadrantAnonymous L96u5it0% (1)
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocument6 pagesReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoNo ratings yet
- AC Generator 22Document9 pagesAC Generator 22Hamisi MgetaNo ratings yet
- IELMO401 Operate Electrical MotorsDocument75 pagesIELMO401 Operate Electrical MotorsdoveemmyNo ratings yet
- Phillips 1972Document5 pagesPhillips 1972dimitris01spNo ratings yet
- AC Drives and Soft Starter Application GuideDocument5 pagesAC Drives and Soft Starter Application GuideMinh TranNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 7 Series Memory ControllersDocument36 pages7 Series Memory ControllersSrinivas Cheruku100% (1)
- Um MC96F6432 V13Document309 pagesUm MC96F6432 V13Сергей БрегедаNo ratings yet
- Multisim 10 Component Reference GuideDocument450 pagesMultisim 10 Component Reference Guideredoctober24100% (2)
- Electronic Position Transmitter: MIL 400LDocument2 pagesElectronic Position Transmitter: MIL 400Lsumit kumarNo ratings yet
- Ticketing SystemDocument21 pagesTicketing SystemKibrom HaftuNo ratings yet
- External Appointment - Copy To Home CollegeDocument4 pagesExternal Appointment - Copy To Home CollegeMAHENDRA COLLEGENo ratings yet
- RRU5301cw Description: Huawei Technologies Co., LTDDocument13 pagesRRU5301cw Description: Huawei Technologies Co., LTDFrank Saavedra ReyesNo ratings yet
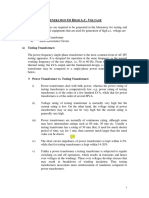
- Testing TransformerDocument14 pagesTesting TransformerBudhaditya GhoshNo ratings yet
- Thesis On Microstrip Patch Antenna DesignDocument6 pagesThesis On Microstrip Patch Antenna DesignBuyingPaperSterlingHeights100% (2)
- Anallysis and Design of Analog Integrated Circuits QuestionsDocument5 pagesAnallysis and Design of Analog Integrated Circuits QuestionsshankarNo ratings yet
- Intruder Products Catalogue 2007: Security & Custom ElectronicsDocument46 pagesIntruder Products Catalogue 2007: Security & Custom Electronicstbaines71No ratings yet
- 2G KPI & Parameter Mapping For MergerCo V - 2Document17 pages2G KPI & Parameter Mapping For MergerCo V - 2Muhammad Basharat Ali AwanNo ratings yet
- Current Transducer - DC SystemDocument2 pagesCurrent Transducer - DC SystemVictor HutahaeanNo ratings yet
- Pet 708Document32 pagesPet 708api-3702225100% (1)
- Magelis SCU Programming Guide PDFDocument142 pagesMagelis SCU Programming Guide PDFFabiano AlbuquerqueNo ratings yet
- Stability Analysis of Boost DC-DC Converter Using Z-TransformDocument7 pagesStability Analysis of Boost DC-DC Converter Using Z-TransformSuriya BaluNo ratings yet
- Brochure Intellix MO150 English Spec SheetDocument2 pagesBrochure Intellix MO150 English Spec SheetkjkljkljlkjljlkNo ratings yet
- Chua CircuitDocument11 pagesChua CircuitpapersaintNo ratings yet
- PS-M-0263 B PANFILE of TSM - 315 - PC14Document1 pagePS-M-0263 B PANFILE of TSM - 315 - PC14ankitNo ratings yet
- LCD TV Power SupplyDocument71 pagesLCD TV Power Supplymgloiop7327No ratings yet
- Transistor As A SwitchDocument8 pagesTransistor As A SwitchdhingrastoreNo ratings yet
- Quick Charge Device ListDocument20 pagesQuick Charge Device ListEstee FizNo ratings yet
- Codificação DesenhosDocument11 pagesCodificação DesenhosRafael PereiraNo ratings yet
- Configuring Xilinx Fpgas With Spi Serial FlashDocument26 pagesConfiguring Xilinx Fpgas With Spi Serial FlashShashikant KumarNo ratings yet
- Description of The Principle of The Digital Technology of The Built-In Processing of The Current Signal of The Arc-Fault Detection Device (AFCI)Document4 pagesDescription of The Principle of The Digital Technology of The Built-In Processing of The Current Signal of The Arc-Fault Detection Device (AFCI)vivian yulie Quintero BarreraNo ratings yet
- 2708232Document10 pages2708232diletanteNo ratings yet
- Yamaha Ysp 1Document68 pagesYamaha Ysp 1Saeid PourfarzibNo ratings yet
- DB222-A Product SpecificationsDocument2 pagesDB222-A Product SpecificationsDon AskmeNo ratings yet