Traffic Light Control
Traffic Light Control
Download as doc, pdf, or txt
You might also like
- Unit-5 PIC18 Architecture PDFDocument26 pagesUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (4)
- Substation SafetyDocument7 pagesSubstation Safetysandeep_chauhan3770100% (2)
- Nidaqmx PythonDocument303 pagesNidaqmx PythonmgiovanardiNo ratings yet
- PIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byDocument7 pagesPIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byNeeraj KarnaniNo ratings yet
- Micro-Controller 1. Pic Controller Pin DiagramDocument8 pagesMicro-Controller 1. Pic Controller Pin DiagramAyachitula Sharath KumarNo ratings yet
- PIC MicrocontrollerDocument21 pagesPIC Microcontrollerdoddo16100% (2)
- PIC Microcontroller EncyclopediaDocument27 pagesPIC Microcontroller EncyclopediaTol Man Shrestha100% (1)
- Embedded System LEC #04: © Dr. Ahmed MahrousDocument24 pagesEmbedded System LEC #04: © Dr. Ahmed MahrousThafer MajeedNo ratings yet
- PicDocument71 pagesPicSanthosh SachithananthamNo ratings yet
- EE6008 Unit 1Document12 pagesEE6008 Unit 1TakeItEasyDude TIEDNo ratings yet
- A4 Led Moving Message Display PDFDocument49 pagesA4 Led Moving Message Display PDFBhupati MakupallyNo ratings yet
- Amc Unit-2Document133 pagesAmc Unit-2Sasi BhushanNo ratings yet
- Unit Ii: PIC MicrocontrollersDocument59 pagesUnit Ii: PIC MicrocontrollersbalaNo ratings yet
- City". We Implemented Using PIC Microcontroller and RF ModuleDocument56 pagesCity". We Implemented Using PIC Microcontroller and RF ModuleSai RakeshNo ratings yet
- Micro Unit 3 NotesDocument16 pagesMicro Unit 3 Notesmohammadsajid1015No ratings yet
- PicDocument94 pagesPicKamal Chopra100% (1)
- Pic Micro ControllersDocument3 pagesPic Micro ControllersSaurabh RastogiNo ratings yet
- EE6008 MBSDDocument34 pagesEE6008 MBSDHans John D'cruzNo ratings yet
- ARM7 - LPC 2148 ProcessorDocument50 pagesARM7 - LPC 2148 ProcessorHong ShaeNo ratings yet
- Pic Micro ControllersDocument18 pagesPic Micro ControllersKrishna BoreddyNo ratings yet
- 2 MarksDocument30 pages2 MarksAnitha Kumari SivathanuNo ratings yet
- PIC Microcontroller IntroductionDocument81 pagesPIC Microcontroller Introductionpnlinh2850% (2)
- PIC 16F877 Microcontroller: Submitted by Anamika Gupta Me Regular (E.C.E)Document44 pagesPIC 16F877 Microcontroller: Submitted by Anamika Gupta Me Regular (E.C.E)Anamika GuptaNo ratings yet
- CA231-Microprocessors and Its Applications Short AnswersDocument15 pagesCA231-Microprocessors and Its Applications Short Answersapi-3770232100% (3)
- Ref Manual Microprocessor - Microcontroller by Krishna GaihreDocument91 pagesRef Manual Microprocessor - Microcontroller by Krishna GaihreEr SarbeshNo ratings yet
- Unit 1Document44 pagesUnit 1TakeItEasyDude TIEDNo ratings yet
- Unit 1&2Document97 pagesUnit 1&2manoj3e9329No ratings yet
- PIC MicrocontrollersDocument8 pagesPIC MicrocontrollersKarri Amarnath100% (1)
- Lec 02 - 05 PIC ModifiedDocument72 pagesLec 02 - 05 PIC ModifiedMaddy Fool100% (1)
- EE6008 Notes RejinpaulDocument234 pagesEE6008 Notes RejinpaulB.S. Mothika sriNo ratings yet
- Question With Answer MP & MCDocument13 pagesQuestion With Answer MP & MCMATHANKUMAR.S100% (1)
- Unit 1 Architecture of Pic 16cXXDocument41 pagesUnit 1 Architecture of Pic 16cXXKapilachander Thangavel100% (1)
- Introduction To Arm ProcessorDocument10 pagesIntroduction To Arm Processorkeerthidhoni100% (1)
- Pic Microcontroller - Class NotesDocument26 pagesPic Microcontroller - Class NotesNarasimha Murthy Yayavaram81% (26)
- Chapter 1: PIC16F887 Microcontroller - Device Overview: In-Circuit Serial Programming OptionDocument12 pagesChapter 1: PIC16F887 Microcontroller - Device Overview: In-Circuit Serial Programming OptionCataNo ratings yet
- Advanced RISC Machine-ARM Notes BhurchandiDocument8 pagesAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariNo ratings yet
- Computer Orgn 230428 235533Document10 pagesComputer Orgn 230428 235533Arathi SuryaramananNo ratings yet
- PIC MicrocontrollersDocument35 pagesPIC Microcontrollersanbuelectrical100% (1)
- CONTENT BEYOND THE SYLLABUSDocument2 pagesCONTENT BEYOND THE SYLLABUSAbiNo ratings yet
- Unit 3 AdvancedMCDocument108 pagesUnit 3 AdvancedMCSubramaniam GnanasekaranNo ratings yet
- TO Pic MicrocontrollersDocument66 pagesTO Pic MicrocontrollersDhananjay Sargar100% (1)
- PIC16F84XDocument33 pagesPIC16F84XSofi Caballero MestraNo ratings yet
- Pic 23Document15 pagesPic 23girush100% (1)
- Microcontroller:: Chapter-8: MicrocontrollersDocument20 pagesMicrocontroller:: Chapter-8: MicrocontrollersMd Raton AliNo ratings yet
- Processor Realization For Application of Convolution: Prashant D Bhirange, V. G. Nasre, M. A. GaikwadDocument5 pagesProcessor Realization For Application of Convolution: Prashant D Bhirange, V. G. Nasre, M. A. GaikwadIJERDNo ratings yet
- SPARCDocument16 pagesSPARCpvt.dhairyaprajapatiNo ratings yet
- Microcontroller (PIC 16F84)Document30 pagesMicrocontroller (PIC 16F84)Ilan KumarNo ratings yet
- Fingur+gsm Based Locker SystemDocument48 pagesFingur+gsm Based Locker SystemGaus PatelNo ratings yet
- PIC Practical Project0470694610Document54 pagesPIC Practical Project0470694610Alex MassNo ratings yet
- Microprocessor Basics and Related TermsDocument27 pagesMicroprocessor Basics and Related TermsJai Sai RamNo ratings yet
- An Introduction To PIC Microcontrollers: Unit 2: Microcontroller ArchitectureDocument40 pagesAn Introduction To PIC Microcontrollers: Unit 2: Microcontroller Architecturehimanshumal100% (2)
- Pic - TPT IeteDocument69 pagesPic - TPT IeteyayavaramNo ratings yet
- DC Unit OneDocument33 pagesDC Unit OneYekanth Kola100% (1)
- Unit 2 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument9 pagesUnit 2 - Microcontroller & Embedded System - WWW - Rgpvnotes.inYash raiNo ratings yet
- 2 16 1350130228 7. Flexible Wireless DataDocument6 pages2 16 1350130228 7. Flexible Wireless DataSumeet SauravNo ratings yet
- Oral Question Bank MC - Nov 2024Document10 pagesOral Question Bank MC - Nov 2024abhijithingmire78No ratings yet
- MPMC (10 6)Document107 pagesMPMC (10 6)hari.yagami.lightNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Lesson Plan Ee6651 CeDocument5 pagesLesson Plan Ee6651 CeSridhar JayaramanNo ratings yet
- Questions On ECE LawsDocument5 pagesQuestions On ECE LawsEdechel CambarihanNo ratings yet
- Logic Symbols and Truth TablesDocument11 pagesLogic Symbols and Truth Tableskeynote76No ratings yet
- ACA NotesDocument60 pagesACA NotesSHIVANI NANDANo ratings yet
- Vlsi Design StylesDocument61 pagesVlsi Design Stylesrakeshluddu042No ratings yet
- 2007 Schuster - Circuit Quantum ElectrodynamicsDocument255 pages2007 Schuster - Circuit Quantum ElectrodynamicsGustavo Moreto PimentaNo ratings yet
- EE1211 Electrical Machines Apr May2008Document3 pagesEE1211 Electrical Machines Apr May2008Priya Nka0% (1)
- Stepper Motor InterfacingDocument5 pagesStepper Motor InterfacingShobanraj Letchumanan100% (1)
- Nodal AnalysisDocument33 pagesNodal AnalysisJamiza shenningNo ratings yet
- Static Electricity ExamplesDocument6 pagesStatic Electricity ExamplesMarina Lopez MuñozNo ratings yet
- DC Motor Speed ControllerDocument22 pagesDC Motor Speed ControllerShafqt MbrkNo ratings yet
- CO Unit 5Document12 pagesCO Unit 5yadavsandeep84841No ratings yet
- Manual de Programação PowerFlex 755 PDFDocument116 pagesManual de Programação PowerFlex 755 PDFFABIO MOACIR KORNDOERFERNo ratings yet
- ContinueDocument2 pagesContinueArdianNo ratings yet
- SRM IST, Kattankulathur - 603 203: Sub Code & Name: 18EES102L WORKSHOP LABDocument7 pagesSRM IST, Kattankulathur - 603 203: Sub Code & Name: 18EES102L WORKSHOP LABgautam KrishnaNo ratings yet
- Se Single Phase Energy Hub Prism Technology Installation Guide AusDocument73 pagesSe Single Phase Energy Hub Prism Technology Installation Guide AusMohammad KhurshidNo ratings yet
- NUS EE TracksDocument2 pagesNUS EE TracksSalman GaditNo ratings yet
- Upgrading ESP Controls, Part 1, by Paul Ford, RedkohDocument18 pagesUpgrading ESP Controls, Part 1, by Paul Ford, RedkohJay Rameshbhai ParikhNo ratings yet
- Daikin VRV IV S Brochure EngDocument28 pagesDaikin VRV IV S Brochure Engsergio.anacletoNo ratings yet
- Sps 500 (STD) ProgramDocument164 pagesSps 500 (STD) Programwahyu100% (1)
- Advanced HVDC Systems at 800 KV and AboveDocument120 pagesAdvanced HVDC Systems at 800 KV and AboveThiyagarjan100% (1)
- V96 en M A008Document110 pagesV96 en M A008Irfan AshrafNo ratings yet
- Ford 5R110W 060: SOLENOID TEST: (Engine Off)Document2 pagesFord 5R110W 060: SOLENOID TEST: (Engine Off)SEANNo ratings yet
- Electrical Test ToolsDocument1 pageElectrical Test ToolsJosé Luis Morán HernándezNo ratings yet
- Abit NF-M2S ManualDocument40 pagesAbit NF-M2S ManualnicknuckNo ratings yet
- Rectangular Dielectric Resonator AntennasDocument5 pagesRectangular Dielectric Resonator AntennasVishwanath VishwanathNo ratings yet
- 29F400Document35 pages29F400AhmadNo ratings yet
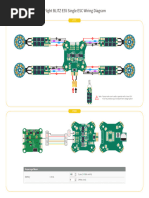
- BLITZ E55 Single ESC Wiring DiagramDocument1 pageBLITZ E55 Single ESC Wiring Diagramredado6990No ratings yet