Analysis of A Truck Suspension Database
Analysis of A Truck Suspension Database
Download as pdf or txt
You might also like
- 스미토모 카운터Document212 pages스미토모 카운터01033948385pjhNo ratings yet
- SRT Calculator User GuideDocument25 pagesSRT Calculator User GuideSPIN2018No ratings yet
- Interacting SubframeDocument11 pagesInteracting SubframePatricio G. ArrienNo ratings yet
- 8100-8400 SerieDocument1 page8100-8400 Serieinfo7879No ratings yet
- Klein Technical GuidelineDocument21 pagesKlein Technical GuidelinePeter100% (2)
- 2 Design ReportDocument10 pages2 Design ReportSanit BhatkarNo ratings yet
- Rollover7 131003172242 Phpapp02 PDFDocument42 pagesRollover7 131003172242 Phpapp02 PDFDark CenobiteNo ratings yet
- ClutchDocument11 pagesClutchMandeep Singh ChawlaNo ratings yet
- Me - 302 e Dynamics of Machines Sessional Theory Total DurationDocument10 pagesMe - 302 e Dynamics of Machines Sessional Theory Total Durationshrey_ecotechcars100% (2)
- Longer and Heavy VehiclesDocument49 pagesLonger and Heavy VehiclesMarcusHuynh88No ratings yet
- IITBadfDocument23 pagesIITBadftinkudhullNo ratings yet
- Hy Drau Lic Crawler Crane: Hoist Rope 26 MM 12t-Rated Line Pul LDocument52 pagesHy Drau Lic Crawler Crane: Hoist Rope 26 MM 12t-Rated Line Pul LChính HoàngNo ratings yet
- Steady State HandlingDocument24 pagesSteady State HandlingArjun H NambiarNo ratings yet
- Auto Full Vehicle NVH Analysis With Rolling Tires 11Document4 pagesAuto Full Vehicle NVH Analysis With Rolling Tires 11Dmitry GrenishenNo ratings yet
- Mercedes Tourismo RHD - 08.2019Document16 pagesMercedes Tourismo RHD - 08.2019Arkadiusz KowalskiNo ratings yet
- Center Mass of Vehicle Au-29Document9 pagesCenter Mass of Vehicle Au-29hamza najamNo ratings yet
- Torque Measurement With Speed SensorsDocument37 pagesTorque Measurement With Speed SensorsΠερικλής ΖυγούραςNo ratings yet
- Chapter 3 SuperchargingDocument16 pagesChapter 3 Superchargingmustafa1011100% (1)
- Drum Brake System Backing Plate: Braking PrincipleDocument3 pagesDrum Brake System Backing Plate: Braking PrincipleSamiullah QureshiNo ratings yet
- Hyundai Heavy Industries: Diesel Counterbalance TrucksDocument16 pagesHyundai Heavy Industries: Diesel Counterbalance TrucksLucasDiezNo ratings yet
- The Gear BoxDocument21 pagesThe Gear BoxRuwan ChandraNo ratings yet
- Smart Speed BumpsDocument20 pagesSmart Speed BumpsSerin babuNo ratings yet
- Giant MPH-3 Disc Brake System Model Year 2002: Owners ManualDocument24 pagesGiant MPH-3 Disc Brake System Model Year 2002: Owners Manuallock.offNo ratings yet
- Segway Final PowerpointDocument26 pagesSegway Final PowerpointApurv GoyalNo ratings yet
- Linkages: 2.1. FOUR - Bar LinkageDocument29 pagesLinkages: 2.1. FOUR - Bar LinkageaddisudagneNo ratings yet
- Calculation of Fuel Consumption of A Vehicle During European Certification CycleDocument4 pagesCalculation of Fuel Consumption of A Vehicle During European Certification CycleAnum YousafNo ratings yet
- IJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationDocument6 pagesIJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationIjrei JournalNo ratings yet
- How To Calculate Wheel Torque From Engine TorqueDocument7 pagesHow To Calculate Wheel Torque From Engine TorqueDevakumarNo ratings yet
- DAF Trucks Axle Configurations HQ enDocument2 pagesDAF Trucks Axle Configurations HQ enAnonymous N7BSLICXSd0% (1)
- Design Project 2 Auto TrannyDocument9 pagesDesign Project 2 Auto TrannyUnmil PatelNo ratings yet
- Power Assisted Gear ShiftingDocument25 pagesPower Assisted Gear ShiftingPramodPradhanNo ratings yet
- Method of Statement of CC1800 CraneDocument14 pagesMethod of Statement of CC1800 CraneABF ETSNo ratings yet
- Eddy Current Braking SystemDocument18 pagesEddy Current Braking SystemAPLCTNNo ratings yet
- Analysis of Automobile SuspensionDocument13 pagesAnalysis of Automobile SuspensionAfeez AzizNo ratings yet
- Geometric Progression of Gear RatiosDocument2 pagesGeometric Progression of Gear RatiosSelva Kumar0% (2)
- Ground PressureDocument7 pagesGround PressurenathansolaiNo ratings yet
- New Gearbox DesignDocument16 pagesNew Gearbox DesignIAN MIGOTNo ratings yet
- Roll StabilityDocument15 pagesRoll StabilityPatricio G. ArrienNo ratings yet
- Trucks and Hauling EquipmentDocument12 pagesTrucks and Hauling EquipmentGold Cube100% (1)
- Passive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeDocument6 pagesPassive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeChristian Mavarez0% (2)
- HOERBIGER DCT-Type SynchronizerDocument4 pagesHOERBIGER DCT-Type SynchronizermaheshmbelgaviNo ratings yet
- Trailing ArmDocument3 pagesTrailing Armtejashraj93No ratings yet
- Automobile Engineering: Steering SystemDocument50 pagesAutomobile Engineering: Steering SystemKarne Dheeraj KumarNo ratings yet
- Function of Steering SystemDocument19 pagesFunction of Steering SystemTeju LoveNo ratings yet
- A Guide To Basic 8D Problem Solving TechniquesDocument162 pagesA Guide To Basic 8D Problem Solving TechniquesHECTOR IBARRANo ratings yet
- Portal Axle Design PDFDocument5 pagesPortal Axle Design PDFUmesh JadhavNo ratings yet
- Storm BrakesDocument63 pagesStorm Brakesrochim_putech_126885No ratings yet
- Wheel Steering System PDFDocument6 pagesWheel Steering System PDFvivek ghoriNo ratings yet
- Chapter 01 Introduction To Servicing Heavy Duty TrucksDocument5 pagesChapter 01 Introduction To Servicing Heavy Duty TrucksRajvir GrewalNo ratings yet
- Performance ParametersDocument18 pagesPerformance ParametersChikeNo ratings yet
- 3902 Maintenance Instruction: Build-Up QF Traction Motor Mounting AssemblyDocument8 pages3902 Maintenance Instruction: Build-Up QF Traction Motor Mounting Assemblyemmsh71No ratings yet
- Caliper Brake PDFDocument1 pageCaliper Brake PDFJhun AquinoNo ratings yet
- 006 EUC 007 Magna SteyrDocument10 pages006 EUC 007 Magna SteyrEduardo ValdiviesoNo ratings yet
- The Damper Levels Influence On Vehicle Roll, Pitch, Bounce and Cornering Behaviour of Passenger Vehicles PDFDocument78 pagesThe Damper Levels Influence On Vehicle Roll, Pitch, Bounce and Cornering Behaviour of Passenger Vehicles PDFDebra JacksonNo ratings yet
- Fu&Cebon 2002Document17 pagesFu&Cebon 2002akseoluNo ratings yet
- Model-Based - Soil Trip Rollover PredictionDocument10 pagesModel-Based - Soil Trip Rollover PredictionKunheechoNo ratings yet
- Optimizing Planetary Gears PDFDocument7 pagesOptimizing Planetary Gears PDFyildyusuf100% (1)
- Tech Paper - Dynamic Analysis of Rotary MachineDocument11 pagesTech Paper - Dynamic Analysis of Rotary MachineSid ShendgeNo ratings yet
- 0279 Icnsc177Document6 pages0279 Icnsc177josa12No ratings yet
- Naf Ems 2013 RotorDocument12 pagesNaf Ems 2013 Rotorletter_ashish4444No ratings yet
- Rollover Stability Analysis of Commercial VehicleDocument6 pagesRollover Stability Analysis of Commercial VehicleInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- NATUECO Book PDFDocument112 pagesNATUECO Book PDFpuvichandranNo ratings yet
- Horticultural Society, Hyderabad - Diary 2022Document476 pagesHorticultural Society, Hyderabad - Diary 2022BharatiyulamNo ratings yet
- Sila Silpam NuvveDocument204 pagesSila Silpam NuvveBharatiyulamNo ratings yet
- Nature Book PDFDocument2 pagesNature Book PDFBharatiyulam100% (1)
- Okka Rupayee Chaalu BharatiyulamDocument2 pagesOkka Rupayee Chaalu BharatiyulamManindar KumarNo ratings yet
- Vaaradhi With SEVA OrgDocument10 pagesVaaradhi With SEVA OrgBharatiyulamNo ratings yet
- EPU of Bio-Pesticides PDFDocument170 pagesEPU of Bio-Pesticides PDFBharatiyulamNo ratings yet
- Kabeer Suktimuktavali Sankara Sreeramarao 1960Document76 pagesKabeer Suktimuktavali Sankara Sreeramarao 1960BharatiyulamNo ratings yet
- Welcome: SEVA Org. & BharatiyulamDocument20 pagesWelcome: SEVA Org. & BharatiyulamBharatiyulamNo ratings yet
- Online Seat Booking For ExaminationDocument6 pagesOnline Seat Booking For ExaminationBharatiyulam100% (1)
- Antioxidant SSR PDFDocument81 pagesAntioxidant SSR PDFBharatiyulamNo ratings yet
- Meo Examination Part-Check ListDocument2 pagesMeo Examination Part-Check ListArun PrasadNo ratings yet
- Bharatiyulam Invitation For You On Facebook Forward ItDocument1 pageBharatiyulam Invitation For You On Facebook Forward ItBharatiyulamNo ratings yet
- Oil SpillsDocument5 pagesOil SpillsBharatiyulamNo ratings yet
- Prevention of Static ElectricityDocument1 pagePrevention of Static ElectricityBharatiyulamNo ratings yet
- Power Train Components MJHDocument17 pagesPower Train Components MJHBharatiyulamNo ratings yet
- PRESTIGEDocument3 pagesPRESTIGEBharatiyulamNo ratings yet
- Petroleum OilDocument5 pagesPetroleum OilgunapalshettyNo ratings yet
- PollutionDocument12 pagesPollutionBharatiyulamNo ratings yet
- Mca Formula SheetDocument4 pagesMca Formula SheetBharatiyulamNo ratings yet
- Overseas Cadet ProgrammesDocument3 pagesOverseas Cadet ProgrammesBharatiyulamNo ratings yet
- MCA Stability BookletDocument19 pagesMCA Stability BookletBharatiyulam0% (1)
- MAM - I, Question BankDocument8 pagesMAM - I, Question BankBharatiyulamNo ratings yet
- Navigation FormulaeDocument1 pageNavigation FormulaeBharatiyulam100% (1)
- The M. S. (Load Line) Regulations 1998 (Amended 2000)Document4 pagesThe M. S. (Load Line) Regulations 1998 (Amended 2000)BharatiyulamNo ratings yet
- The Magnetic Compass CardDocument148 pagesThe Magnetic Compass CardBharatiyulamNo ratings yet
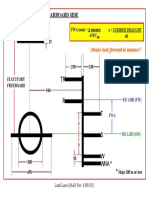
- Load Line DiagramDocument1 pageLoad Line DiagramBharatiyulamNo ratings yet
- TSP 6500 7000 enDocument8 pagesTSP 6500 7000 enMahmoud ElerakyNo ratings yet
- New Holland T4 LP I I I: T4.75 LP T4.85 LP T4.95 LP T4.105 LPDocument12 pagesNew Holland T4 LP I I I: T4.75 LP T4.85 LP T4.95 LP T4.105 LPGorazd100% (1)
- Pavement Design Spreadsheet - CCAA MethodDocument37 pagesPavement Design Spreadsheet - CCAA MethodShoyeeb Ahmed0% (1)
- Army TM 9 2320 361 20 Force To 36a12 1b 1094 2Document1,209 pagesArmy TM 9 2320 361 20 Force To 36a12 1b 1094 2wetfaceNo ratings yet
- Auto Week #2Document1 pageAuto Week #2Caseydb6No ratings yet
- Quarry Development Plan - Wuthrich Quarry: Site C Clean Energy ProjectDocument28 pagesQuarry Development Plan - Wuthrich Quarry: Site C Clean Energy ProjectWillie TumoeNo ratings yet
- Geotechnical Review of Low Wall Pit Xy - Case StudyDocument8 pagesGeotechnical Review of Low Wall Pit Xy - Case Study09devilNo ratings yet
- ZW 220casdeDocument11 pagesZW 220casdegaurav champawatNo ratings yet
- AC Cargo Tractor: Standard FeaturesDocument2 pagesAC Cargo Tractor: Standard FeaturesYakupovmmNo ratings yet
- Circle Check GuideDocument174 pagesCircle Check GuideRandy1313No ratings yet
- E45-70XN SERIES Technical GuideDocument12 pagesE45-70XN SERIES Technical GuideEmilio CortesNo ratings yet
- PC400LC 7Document16 pagesPC400LC 7Riama Mei A SitinjakNo ratings yet
- Stresses in Rigid PavementsDocument84 pagesStresses in Rigid PavementsCharl de Reuck100% (1)
- Elevador Rotary Lift OperacionDocument12 pagesElevador Rotary Lift OperacionMiguel Eliezer SequeiraNo ratings yet
- Undercutting and BackfillingDocument9 pagesUndercutting and BackfillingMohan ManickamNo ratings yet
- 795f Ac Flyer HRDocument1 page795f Ac Flyer HROscarNo ratings yet
- Dp1500i t3 Specification Sheet EnglishDocument4 pagesDp1500i t3 Specification Sheet Englishjean-pierre joubertNo ratings yet
- Repair Manual - TF22Document50 pagesRepair Manual - TF22jacques PerronNo ratings yet
- July 2014Document15 pagesJuly 2014Pumper TraderNo ratings yet
- LLR Test General Driving Principles EnglishDocument23 pagesLLR Test General Driving Principles Englishu2mailrahulNo ratings yet
- NH 6041351201 PreviewDocument31 pagesNH 6041351201 PreviewYesenia Gpe Vega100% (1)
- SI 50 U.operations - UkDocument445 pagesSI 50 U.operations - UkGaatje Echtniksaan100% (1)
- Training Manual For Risk Assessment in Cement Plants - Part4Document10 pagesTraining Manual For Risk Assessment in Cement Plants - Part4Kamran ZafarNo ratings yet
- Code of Practices/ Safe Operating Procedure For Dumper/tipper, Dump, Dozer, Shovel, Drill, Surface Miner, TrafficDocument30 pagesCode of Practices/ Safe Operating Procedure For Dumper/tipper, Dump, Dozer, Shovel, Drill, Surface Miner, TrafficBarjora BankuraNo ratings yet
- Actros 2031 SDocument13 pagesActros 2031 SrudiNo ratings yet
- Terex Gottwald Model 6 Harbour Crane: A Combination of Power and FunctionalityDocument43 pagesTerex Gottwald Model 6 Harbour Crane: A Combination of Power and Functionalitychelin33100% (1)
- Coverage 2Document6 pagesCoverage 2Сергей ХозяшевNo ratings yet
- Self-Propelled, Pallet Lift Truck: Operation Maintenance Repair Parts ListDocument92 pagesSelf-Propelled, Pallet Lift Truck: Operation Maintenance Repair Parts Listkirk sutherland100% (1)