Download as pdf or txt
You might also like
- Iso 10816 Vibration GuidelineDocument2 pagesIso 10816 Vibration GuidelineSPIREASIA100% (10)
- 2019 TASEA Two-Layer Adaptive Surrogate-Assisted Evolutionary Algorithm For High-Dimensional Computationally Expensive ProblemsDocument33 pages2019 TASEA Two-Layer Adaptive Surrogate-Assisted Evolutionary Algorithm For High-Dimensional Computationally Expensive ProblemsZhangming WuNo ratings yet
- Content ServerDocument22 pagesContent ServerIgnacius Garridum ContulianoNo ratings yet
- Li 2013 - SPSA - Well Placement and Control (Robust)Document22 pagesLi 2013 - SPSA - Well Placement and Control (Robust)jamal manssourNo ratings yet
- Response Surface Approximation of Pareto Optimal Front in Multi-Objective OptimizationDocument15 pagesResponse Surface Approximation of Pareto Optimal Front in Multi-Objective OptimizationspuzzarNo ratings yet
- StASaER MOODocument14 pagesStASaER MOOAuref RostamianNo ratings yet
- An Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling ProblemDocument13 pagesAn Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling Problemzrdasma01No ratings yet
- A Study On The Convergence of Multiobjective Evolutionary AlgorithmsDocument18 pagesA Study On The Convergence of Multiobjective Evolutionary AlgorithmsSarvesh GantalaNo ratings yet
- Determining The Optimal Cross Section of BeamsDocument55 pagesDetermining The Optimal Cross Section of BeamsMalik AtikNo ratings yet
- A Differential Evolution Algorithm Based On Multi-Population For Economic Dispatch Problems With Valve-Point EffectsDocument25 pagesA Differential Evolution Algorithm Based On Multi-Population For Economic Dispatch Problems With Valve-Point EffectssvasandNo ratings yet
- Design Optimization of The Lines of The Bulbous BowDocument12 pagesDesign Optimization of The Lines of The Bulbous BowFernando Raúl LADINONo ratings yet
- An Enhanced Sample Average Approximation Method For Stochastic Optimization - 2016 - International Journal of Production Economics PDFDocument23 pagesAn Enhanced Sample Average Approximation Method For Stochastic Optimization - 2016 - International Journal of Production Economics PDFAntonio Carlos RodriguesNo ratings yet
- Textfor OperationDocument15 pagesTextfor Operationiman MHNavehNo ratings yet
- Ijiec 2019 19Document22 pagesIjiec 2019 19b4rtm4nNo ratings yet
- Optimization of Field Development Using Particle Swarm Optimization and New Well Pattern Descriptions Literature ReviewDocument7 pagesOptimization of Field Development Using Particle Swarm Optimization and New Well Pattern Descriptions Literature ReviewPrecious OluwadahunsiNo ratings yet
- An Efficient Multiobjective Differential EvolutionDocument19 pagesAn Efficient Multiobjective Differential Evolutionkmewar981No ratings yet
- 1-S2.0-S1568494610000773-Main RUTEO PDFDocument12 pages1-S2.0-S1568494610000773-Main RUTEO PDFCESARPINEDANo ratings yet
- Application Methods For Genetic Algorithms For The Search of Feed Positions in The Design of A Reactive Distillation ProcessDocument10 pagesApplication Methods For Genetic Algorithms For The Search of Feed Positions in The Design of A Reactive Distillation ProcessAdam BuchananNo ratings yet
- Single-Step Deep Reinforcement Learning For Two-And Three-Dimensional Optimal Shape DesignDocument22 pagesSingle-Step Deep Reinforcement Learning For Two-And Three-Dimensional Optimal Shape DesignbuntarNo ratings yet
- Belief Networks in Construction SimulationDocument8 pagesBelief Networks in Construction SimulationaeroacademicNo ratings yet
- A Parallel Dynamic Programming Algorithm For Multi-Reservoir SystemDocument15 pagesA Parallel Dynamic Programming Algorithm For Multi-Reservoir SystemMariana MarselinaNo ratings yet
- Kotrljajuci Horizont U Planiranju ProizvodnjeDocument14 pagesKotrljajuci Horizont U Planiranju Proizvodnjezaki83No ratings yet
- A Review On The Numerical Inversion Methods of Relative Permeability CurvesDocument6 pagesA Review On The Numerical Inversion Methods of Relative Permeability Curvesjsotofmet4918No ratings yet
- An Enhanced Surrogate-Assisted Differential EvolutDocument34 pagesAn Enhanced Surrogate-Assisted Differential EvolutJ Pedro CarvalhoNo ratings yet
- Multi-Objective Design of Advanced Power Distribution Networks Using Restrictedpopulation-Based Multi-Objective Seekeroptimisation-Algorithm and Fuzzy-OperatorDocument21 pagesMulti-Objective Design of Advanced Power Distribution Networks Using Restrictedpopulation-Based Multi-Objective Seekeroptimisation-Algorithm and Fuzzy-OperatorApikShafieeNo ratings yet
- Genetic Algorithm For Integrated Models of Continuous Berth Allocation Problem and Quay Crane Scheduling With Non Crossing ConstraintDocument6 pagesGenetic Algorithm For Integrated Models of Continuous Berth Allocation Problem and Quay Crane Scheduling With Non Crossing ConstraintImane TorbiNo ratings yet
- MainDocument26 pagesMaingabrielNo ratings yet
- Kashif 2019Document15 pagesKashif 2019jamal manssourNo ratings yet
- Computers & Operations Research: Su Nguyen, Mengjie Zhang, Mark Johnston, Kay Chen TanDocument11 pagesComputers & Operations Research: Su Nguyen, Mengjie Zhang, Mark Johnston, Kay Chen TanImane TorbiNo ratings yet
- A Practical, Gradient-Based Approach For Parameter Selection in History MatchingDocument8 pagesA Practical, Gradient-Based Approach For Parameter Selection in History Matchingalberto_cominelliNo ratings yet
- Optimizing The Vehicle Routing Problem With Time Windows: A Discrete Particle Swarm Optimization ApproachDocument14 pagesOptimizing The Vehicle Routing Problem With Time Windows: A Discrete Particle Swarm Optimization ApproachKasuri AbilashiniNo ratings yet
- Model Reduction High DimensionDocument20 pagesModel Reduction High DimensionLei TuNo ratings yet
- Search-Based Planning For Manipulation With Motion PrimitivesDocument7 pagesSearch-Based Planning For Manipulation With Motion PrimitivesTales MarquesNo ratings yet
- Application of Coal Price Prediction Method BasedDocument22 pagesApplication of Coal Price Prediction Method BasedGbenga AdewumiNo ratings yet
- C. Christober Asir Rajan2007Document11 pagesC. Christober Asir Rajan2007avishekkgecNo ratings yet
- Hydro-Thermal Generation Scheduling Using Integrated Gravitational Search Algorithm and Predator-Prey Optimization TechniqueDocument20 pagesHydro-Thermal Generation Scheduling Using Integrated Gravitational Search Algorithm and Predator-Prey Optimization Techniquehassan499No ratings yet
- Surogate ModelingDocument11 pagesSurogate ModelingGamini SureshNo ratings yet
- Pareto OptimizationDocument7 pagesPareto OptimizationeandreimariusNo ratings yet
- Andrew Ning Using Blade Element Momentum Methods With Gradient Based OptimisationDocument25 pagesAndrew Ning Using Blade Element Momentum Methods With Gradient Based OptimisationSubhenduNo ratings yet
- Simulation Optimization For A Flexible Jobshop Scheduling Problem Using An Estimation of Distribution AlgorithmDocument20 pagesSimulation Optimization For A Flexible Jobshop Scheduling Problem Using An Estimation of Distribution Algorithmjuan ardilaNo ratings yet
- Adaptive Chaotic Marine Predators Hill Climbing Algorithm For Large-Scale Design OptimizationsDocument26 pagesAdaptive Chaotic Marine Predators Hill Climbing Algorithm For Large-Scale Design OptimizationsSagar BhargavaNo ratings yet
- Transaction HTS2012Document11 pagesTransaction HTS2012Sujoy DasNo ratings yet
- Generating Variational Geometry of A Hole With Composite TolerancesDocument16 pagesGenerating Variational Geometry of A Hole With Composite TolerancesChetan GaonkarNo ratings yet
- Miguel 2013Document15 pagesMiguel 2013Rober Waldir Quispe UlloaNo ratings yet
- Automation in Construction: Zhenyuan Liu, Liu Yang, Raoyi Deng, Jing TianDocument9 pagesAutomation in Construction: Zhenyuan Liu, Liu Yang, Raoyi Deng, Jing TianCESARPINEDANo ratings yet
- An Assembly Line Balancing Problem Autom20160420-4084-164o0p5 PDFDocument8 pagesAn Assembly Line Balancing Problem Autom20160420-4084-164o0p5 PDFAuraNo ratings yet
- Constrained Dynamic Economic Dispatch Solution Using Particle Swarm OptimizationDocument6 pagesConstrained Dynamic Economic Dispatch Solution Using Particle Swarm OptimizationChiko KheruNo ratings yet
- ARPN JournalDocument12 pagesARPN JournalbaalaajeeNo ratings yet
- VNSADocument26 pagesVNSAAbdulrahman HashemyNo ratings yet
- Shape Optimization in Ship Hydrodynamics Using ComputationalDocument18 pagesShape Optimization in Ship Hydrodynamics Using ComputationalFatwa AzamNo ratings yet
- Urtec 2659996 MsDocument17 pagesUrtec 2659996 MsSanjay singhNo ratings yet
- ModeFrontier For The Optimal Design of Electrical MachinesDocument8 pagesModeFrontier For The Optimal Design of Electrical MachinesAmir MosaviNo ratings yet
- Hydropower Optimization Using Deep Learning: (Ole - Granmo, Jivitesh - Sharma) @uia - NoDocument13 pagesHydropower Optimization Using Deep Learning: (Ole - Granmo, Jivitesh - Sharma) @uia - Nojorge jorgeNo ratings yet
- Ik 4Document17 pagesIk 4AQEEL ANWARNo ratings yet
- Optimal Cost Design of Water Distribution NetworksDocument49 pagesOptimal Cost Design of Water Distribution NetworksYoussefNo ratings yet
- Dynamics and Design Genetic by Algorithm Optimization Coupling Computational Fluid Dynamics and Genetic AlgorithmDocument14 pagesDynamics and Design Genetic by Algorithm Optimization Coupling Computational Fluid Dynamics and Genetic AlgorithmBrian Quintero ArboledaNo ratings yet
- Li Chen Et Al. Advances in Water Resoures 30 (2007) 1082-1093Document12 pagesLi Chen Et Al. Advances in Water Resoures 30 (2007) 1082-1093Jl SuanhaNo ratings yet
- A Multi-Objective Resource-Constrained Optimization of Time-Cost Trade-Off Problems in Scheduling ProjectDocument33 pagesA Multi-Objective Resource-Constrained Optimization of Time-Cost Trade-Off Problems in Scheduling Projectalbert.csdnNo ratings yet
- 1 s2.0 S096599781400091X MainDocument13 pages1 s2.0 S096599781400091X MainRogério FernandesNo ratings yet
- Well Spacing ProjectDocument4 pagesWell Spacing ProjectPrecious OluwadahunsiNo ratings yet
- Load EqualisationDocument4 pagesLoad EqualisationLaxmikant BagaleNo ratings yet
- Coordination of Movement-Lecture Notes 20201Document47 pagesCoordination of Movement-Lecture Notes 20201Zobayer AhmedNo ratings yet
- FDD-Sand Replacement MethodDocument5 pagesFDD-Sand Replacement MethodRitesh Kumar100% (2)
- Gcho Annual Report 2019-2020Document93 pagesGcho Annual Report 2019-2020Kemuel Bagsit100% (1)
- 32-42-27-000-001-A - Removal of The BrakeDocument11 pages32-42-27-000-001-A - Removal of The BrakeYaser SahiboleNo ratings yet
- Combinations and PermutationsDocument15 pagesCombinations and PermutationsGetor SenaNo ratings yet
- Application of Duality For Derivation of Current Converter TopologiesDocument29 pagesApplication of Duality For Derivation of Current Converter Topologiestinhmaixatoi2006No ratings yet
- Unit I - Module 2 - ENS181Document28 pagesUnit I - Module 2 - ENS181Anyanna MunderNo ratings yet
- Consider The Following Reaction: 2al + 6Hbr 2albr + 3H A. When 4.63 Moles of Al React With 7.82 Moles of HBR, How Many Moles of H Are Formed? B. What Is The Limiting Reactant?Document10 pagesConsider The Following Reaction: 2al + 6Hbr 2albr + 3H A. When 4.63 Moles of Al React With 7.82 Moles of HBR, How Many Moles of H Are Formed? B. What Is The Limiting Reactant?StevenNo ratings yet
- Physics Coursework Youngs ModulusDocument5 pagesPhysics Coursework Youngs Modulusafjzdonobiowee100% (2)
- DLL ENG8 2NDQ 7th Week EditedDocument4 pagesDLL ENG8 2NDQ 7th Week EditedMichael Manipon SegundoNo ratings yet
- Danish Suri Updated ResumeDocument2 pagesDanish Suri Updated ResumeabhishekNo ratings yet
- Behavioral Finance Topic 6Document16 pagesBehavioral Finance Topic 6Tolfu FutolNo ratings yet
- Doppler RadarDocument38 pagesDoppler RadarBhumika KansalNo ratings yet
- CH 8: Steady - State Non-Isothermal Reactor Design: BalanceDocument96 pagesCH 8: Steady - State Non-Isothermal Reactor Design: BalanceRaja RamNo ratings yet
- 03.conduction Part1Document35 pages03.conduction Part1Nana TweneboahNo ratings yet
- ZnO Bi2Te3 Jaing2017Document5 pagesZnO Bi2Te3 Jaing2017Dira AzusaNo ratings yet
- Communication Letter - JudgesDocument5 pagesCommunication Letter - JudgesNathanielNo ratings yet
- 21st Century Lit Lesson 2Document15 pages21st Century Lit Lesson 2mark padernalNo ratings yet
- RegressionDocument25 pagesRegressionABY MOTTY RMCAA20-23No ratings yet
- TGM - Petrochemical Complexes - 160910 - NK PDFDocument240 pagesTGM - Petrochemical Complexes - 160910 - NK PDFChristina george babyNo ratings yet
- Corrosion Por H2s-Co2 en DuctosDocument8 pagesCorrosion Por H2s-Co2 en DuctosJuan Roberto López BetanzosNo ratings yet
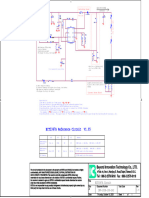
- BIT3367A Reference Circuit V1.05: Vin 12V-28V LED 48V/300mA OVP 56VDocument1 pageBIT3367A Reference Circuit V1.05: Vin 12V-28V LED 48V/300mA OVP 56VSyeikh KeyderNo ratings yet
- Suraku Academy - CT DS - 301Document1 pageSuraku Academy - CT DS - 301Arjun BhargavaNo ratings yet
- UNEP Handbook Climate Change AssesmentDocument464 pagesUNEP Handbook Climate Change AssesmentvthiseasNo ratings yet
- Heidegger On Inception (GA70)Document9 pagesHeidegger On Inception (GA70)Sardanapal ben Esarhaddon100% (1)
- LCCA AnalysisDocument101 pagesLCCA AnalysisVivek VermaNo ratings yet
- Tutorial Chapter 2Document5 pagesTutorial Chapter 2Naasir SheekeyeNo ratings yet
- Summarisingkelpiesheet 2Document2 pagesSummarisingkelpiesheet 2Fatma SelimNo ratings yet