0% found this document useful (0 votes)
4 viewsMicroprocessor
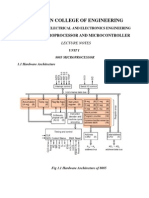
The document provides an overview of the structure and function of a microcomputer's CPU, explaining its components such as the microprocessor, registers, arithmetic and logic unit (ALU), and control unit. It details the roles of various registers, the organization of the CPU, and the processes involved in instruction execution, including the instruction cycle and data flow. Additionally, it highlights the importance of microcomputers in dedicated applications due to their low cost and size compared to mini and mainframe computers.
Uploaded by
yanndjoko1Copyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
4 viewsMicroprocessor
The document provides an overview of the structure and function of a microcomputer's CPU, explaining its components such as the microprocessor, registers, arithmetic and logic unit (ALU), and control unit. It details the roles of various registers, the organization of the CPU, and the processes involved in instruction execution, including the instruction cycle and data flow. Additionally, it highlights the importance of microcomputers in dedicated applications due to their low cost and size compared to mini and mainframe computers.
Uploaded by
yanndjoko1Copyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 9