Unit 4
Unit 4
Download as pptx, pdf, or txt
You might also like
- Carestation 620 - Manual Técnico - InglêsDocument530 pagesCarestation 620 - Manual Técnico - InglêsDaniel Silva Nascimento100% (7)
- Cblm-Hydraulic ExcavatorDocument111 pagesCblm-Hydraulic Excavatorjoan dela cruz83% (6)
- Protect Critical Iot Devices With Vxworks Secure Boot and Secure LoadingDocument7 pagesProtect Critical Iot Devices With Vxworks Secure Boot and Secure LoadingDouglas Galetti RibeiroNo ratings yet
- ENEA OSE Epsilon ARM Kernel Reference ManualDocument40 pagesENEA OSE Epsilon ARM Kernel Reference Manualbinary11No ratings yet
- RTOS Based Embedded System DesignDocument16 pagesRTOS Based Embedded System DesignSagar DhapkeNo ratings yet
- Open Source RTOS Implementation For On-Board Computer (OBC) in STUDSAT-2Document13 pagesOpen Source RTOS Implementation For On-Board Computer (OBC) in STUDSAT-2Eddy VinoNo ratings yet
- Easy8051 v6 Development SystemDocument4 pagesEasy8051 v6 Development SystemShobhit SinghNo ratings yet
- 02-General Purpose ProcessorsDocument37 pages02-General Purpose Processorswaqar khan77No ratings yet
- IT Operations Management Team A Complete Guide - 2021 EditionFrom EverandIT Operations Management Team A Complete Guide - 2021 EditionNo ratings yet
- Sop GSSDocument3 pagesSop GSSArun Murugaiyan100% (2)
- Single Line Diagram: Electrical Layout PlanDocument1 pageSingle Line Diagram: Electrical Layout PlanRod NajarroNo ratings yet
- Embedded Linux SlidesDocument552 pagesEmbedded Linux SlidesYadhu KrishNo ratings yet
- FreeRTOS Interupt ManagementDocument32 pagesFreeRTOS Interupt ManagementTôiXấuXaNo ratings yet
- RTOS Lab ManualDocument73 pagesRTOS Lab ManualBhupati MakupallyNo ratings yet
- IntrDocument26 pagesIntrRajesh ReddyNo ratings yet
- RTOS - Threads & ProcessDocument20 pagesRTOS - Threads & ProcessBhuvana GowdaNo ratings yet
- Term Paper On Embedded SystemDocument11 pagesTerm Paper On Embedded Systemsupreetsingh1960% (1)
- Embedded System Case StudyDocument6 pagesEmbedded System Case StudyRavi kumar ArigelaNo ratings yet
- Cloud Computing: Assignment-1Document14 pagesCloud Computing: Assignment-1Ravi Teja CherukuriNo ratings yet
- P11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyDocument45 pagesP11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyMohanty AyodhyaNo ratings yet
- Interrupt HandlerDocument2 pagesInterrupt HandlerizzmohdNo ratings yet
- Priority Assignment in Waiting Line ProblemsDocument8 pagesPriority Assignment in Waiting Line ProblemsmduhovichNo ratings yet
- 5 Operating SystemsDocument23 pages5 Operating SystemsPoorna ChelvanNo ratings yet
- ES 22 Lab ManualDocument33 pagesES 22 Lab ManualRoselle Joy Dela CruzNo ratings yet
- AssignmentDocument29 pagesAssignmentBala KrishnanNo ratings yet
- Embedded System: 1 HistoryDocument11 pagesEmbedded System: 1 HistoryAnonymous E4Rbo2sNo ratings yet
- CMP3008 LN1 CourseOverview IntroductionDocument49 pagesCMP3008 LN1 CourseOverview IntroductionAmmar JagadhitaNo ratings yet
- System C Usage TutorialDocument38 pagesSystem C Usage TutorialJeffrey BrownNo ratings yet
- Survey of RtosDocument17 pagesSurvey of Rtoskvamsee112100% (1)
- CAN ProtocolDocument21 pagesCAN ProtocolVijayalaxmiKalalNo ratings yet
- Basic Structure of ComputersDocument26 pagesBasic Structure of ComputersLyn-Jo Chris SarmientoNo ratings yet
- Analyzing Kernel Crash On Red HatDocument9 pagesAnalyzing Kernel Crash On Red Hatalexms10No ratings yet
- Micro ProcesserDocument18 pagesMicro ProcesserChaitali Binzade0% (1)
- 1151ec117 - Eosdd - Unit2 - Question - Bank PDFDocument26 pages1151ec117 - Eosdd - Unit2 - Question - Bank PDFLordwin CecilNo ratings yet
- Chapter 10 MicroprocessorDocument33 pagesChapter 10 MicroprocessorUmarNo ratings yet
- Storage Classes: Global & Local VariablesDocument30 pagesStorage Classes: Global & Local VariablesPoojanagasai KarumanchiNo ratings yet
- Chapter 5Document49 pagesChapter 5MuhammedYeshawNo ratings yet
- Chapter 4 (Processors and Memory Hierarchy)Document17 pagesChapter 4 (Processors and Memory Hierarchy)Kushal Sh100% (1)
- FreeRTOS - TasksDocument31 pagesFreeRTOS - TasksMani Kandan KNo ratings yet
- ECE699 Lecture 10 Linux On ZynqDocument23 pagesECE699 Lecture 10 Linux On ZynqLê Đình TiếnNo ratings yet
- Unit2 Input OutputDocument10 pagesUnit2 Input OutputDeepak KumbharNo ratings yet
- OpenCL Best Practices GuideDocument54 pagesOpenCL Best Practices Guideperdo_tempoNo ratings yet
- Xmpp-Real Time WebDocument32 pagesXmpp-Real Time Webabrar sairNo ratings yet
- eCOS Operating SystemDocument22 pageseCOS Operating SystemSuganya Selvaraj0% (1)
- The History and Evolution of EngineeringDocument2 pagesThe History and Evolution of EngineeringZack Norman100% (1)
- Gen of OSDocument13 pagesGen of OSLiving SoulNo ratings yet
- Overview of RTOSDocument22 pagesOverview of RTOSveeramaniks408No ratings yet
- PIC MicrocontrollersDocument40 pagesPIC MicrocontrollersRamaDinakaranNo ratings yet
- Module 2 VirtualizationDocument65 pagesModule 2 VirtualizationJust Watch ItNo ratings yet
- Superscaling in Computer ArchitectureDocument9 pagesSuperscaling in Computer ArchitectureC183007 Md. Nayem HossainNo ratings yet
- FSM Melay Using 1011Document3 pagesFSM Melay Using 1011dineshvhavalNo ratings yet
- Operating SystemDocument277 pagesOperating SystemkennatolosaNo ratings yet
- Worklog 5761 SyncDocument14 pagesWorklog 5761 Synctuanhai1989No ratings yet
- The History of MicroprocessorDocument13 pagesThe History of MicroprocessorPick N ClickNo ratings yet
- 6LoWPAN TutorialDocument45 pages6LoWPAN TutorialEdita LatifiNo ratings yet
- Real-Time Systems Lecture 1 - IntroductionDocument47 pagesReal-Time Systems Lecture 1 - IntroductionGyhgy EwfdewNo ratings yet
- X-Windows Lab ManualDocument109 pagesX-Windows Lab ManualDeepika Singh100% (1)
- U-Boot-v2: Sascha Hauer Marc Kleine-BuddeDocument36 pagesU-Boot-v2: Sascha Hauer Marc Kleine-BuddeshashikanthNo ratings yet
- Real-Time Operating Systems An Ongoing ReviewDocument4 pagesReal-Time Operating Systems An Ongoing Reviewsharath_rakkiNo ratings yet
- Unit-4 PPT. Embedded Systems by SuryaDocument34 pagesUnit-4 PPT. Embedded Systems by SuryaAnonymous 3yqNzCxtTz100% (1)
- Lec 8Document17 pagesLec 8deemo1354210No ratings yet
- WWW Plctutorialpoi...Document18 pagesWWW Plctutorialpoi...baapmatsikha5No ratings yet
- Introduction To Embedded Systems: Melaku MDocument150 pagesIntroduction To Embedded Systems: Melaku MTalemaNo ratings yet
- Interrupcions: Processor - I/O Speed MismatchDocument18 pagesInterrupcions: Processor - I/O Speed MismatchRonyVargasNo ratings yet
- P S Datasheet Ps 5000Document2 pagesP S Datasheet Ps 5000Robinson GuanemeNo ratings yet
- Ban Depan EzPartsWeb PDFDocument1 pageBan Depan EzPartsWeb PDFLagaDiPerantauanNo ratings yet
- 6D170-3 Structure and FunctionDocument251 pages6D170-3 Structure and FunctionPrudz100% (2)
- Breville Bes840XL User ManualDocument38 pagesBreville Bes840XL User Manualchampion11311No ratings yet
- QRF D375a-5Document2 pagesQRF D375a-5Ralf MaurerNo ratings yet
- pdsf1000 g900dp DPC 4c5 enDocument2 pagespdsf1000 g900dp DPC 4c5 enDedy setiawanNo ratings yet
- About Us: (Co. No. 202101009545 (1409844-K) )Document2 pagesAbout Us: (Co. No. 202101009545 (1409844-K) )DamonChongNo ratings yet
- Mlu Dn32hp Manual2Document1,040 pagesMlu Dn32hp Manual2Gabriel BelNo ratings yet
- SL-391 RadsokDocument29 pagesSL-391 RadsokjmbourvenNo ratings yet
- VP - HAWE - Válvula de PreenchimentoDocument8 pagesVP - HAWE - Válvula de PreenchimentoBademianNo ratings yet
- 773E & 775E Off-Highway Truck Electrical System: Machine Harness Connector and Component LocationsDocument4 pages773E & 775E Off-Highway Truck Electrical System: Machine Harness Connector and Component Locationscandra purnama100% (2)
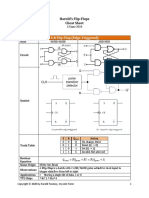
- Harolds Discrete Math Flip Flops Cheat Sheet 2020Document6 pagesHarolds Discrete Math Flip Flops Cheat Sheet 2020Nandini JayakumarNo ratings yet
- As-Is Air Compressors Management (V1)Document1 pageAs-Is Air Compressors Management (V1)Muhammad Faizan SiddiquiNo ratings yet
- Xbox One - SDocument15 pagesXbox One - SAlexNo ratings yet
- Plano Thomas Numatico169484ADocument3 pagesPlano Thomas Numatico169484ADaniel Alex SánchezNo ratings yet
- Introduction Temperature Sensor PT1000 - v1-0 - ENDocument7 pagesIntroduction Temperature Sensor PT1000 - v1-0 - ENasif hameedNo ratings yet
- Swing MotorDocument15 pagesSwing Motordoan lucNo ratings yet
- 10-60kVA UPS - NEUTRAL - En-EU Installation and Operation Manual (A5) - 192321262006003Document62 pages10-60kVA UPS - NEUTRAL - En-EU Installation and Operation Manual (A5) - 192321262006003Stuart MacPhailNo ratings yet
- Dell PowerEdge R7415 Owners ManualDocument172 pagesDell PowerEdge R7415 Owners ManualSudarshan AgnihotriNo ratings yet
- Adjusting Brake Clearance To SpecificationDocument5 pagesAdjusting Brake Clearance To SpecificationMarian Patnaan Rabang100% (1)
- ME Trouble Shooting - V70320-0005Document9 pagesME Trouble Shooting - V70320-0005bkans crerercNo ratings yet
- DX1000Document2 pagesDX1000Juan OsorioNo ratings yet
- Bulb DVR Camera PriceDocument22 pagesBulb DVR Camera PriceIKSAN HADINo ratings yet
- Catalogo Numatics 554SA400K046T30Document25 pagesCatalogo Numatics 554SA400K046T30Jair Mata Cuenca100% (1)
- As 16491 Dl-Ep1 Um WW GB 1072 5Document132 pagesAs 16491 Dl-Ep1 Um WW GB 1072 5Francisco Ivan Silva TapiaNo ratings yet
- M2tex1000lt10ns 1Document59 pagesM2tex1000lt10ns 1Manuel AlvaradoNo ratings yet