Actuation Systems
Actuation Systems
Download as pptx, pdf, or txt
You might also like
- Light Reflection and Refraction NotesDocument34 pagesLight Reflection and Refraction NotesMurli100% (11)
- Introduction To DC Machine: by Dr. Shubhobrata RudraDocument129 pagesIntroduction To DC Machine: by Dr. Shubhobrata RudraBhabani sankar KishanNo ratings yet
- MCT 5.1Document70 pagesMCT 5.1Alfred CheriyanNo ratings yet
- Electrical Actuation SystemsDocument54 pagesElectrical Actuation Systemsprashant_cool_4_uNo ratings yet
- 05 Electrical Actuating SystemsDocument55 pages05 Electrical Actuating Systemsboniswamhlongo68No ratings yet
- Mechatroncis UNIT 5Document28 pagesMechatroncis UNIT 5Mayank GijreNo ratings yet
- Unit 2: Electrical Actuation SystemsDocument47 pagesUnit 2: Electrical Actuation SystemsHariprasadNo ratings yet
- Sidra Unit 2 FullDocument42 pagesSidra Unit 2 FullSidra BegumNo ratings yet
- Electrical Motors: ECE131 Basic Electrical & Electronics EnggDocument58 pagesElectrical Motors: ECE131 Basic Electrical & Electronics EnggVinamra MittalNo ratings yet
- Mechatronics MotorsDocument39 pagesMechatronics MotorsSanskar AgrawalNo ratings yet
- TRC2001 NotesDocument10 pagesTRC2001 NotesNick JamieNo ratings yet
- AC Machines Alternators 1Document16 pagesAC Machines Alternators 1Vanvan BitonNo ratings yet
- Chapter 1: Introduction To Electrical Machines Acm 03 - DC and Ac MachineryDocument14 pagesChapter 1: Introduction To Electrical Machines Acm 03 - DC and Ac MachineryGlaze GregorioNo ratings yet
- (Week 14-15) DC MachinesDocument44 pages(Week 14-15) DC Machinesfarhatul qistinaNo ratings yet
- Type of NC SystemDocument20 pagesType of NC Systemamit kumarNo ratings yet
- LEC - 05 (DC Machines)Document23 pagesLEC - 05 (DC Machines)zain malik100% (1)
- Module 3-1Document53 pagesModule 3-1anishdeshmukh108No ratings yet
- Three Phase Synchronous MachinesDocument41 pagesThree Phase Synchronous MachinesMausam BasnetNo ratings yet
- UNIT-3 Robot Drive MechanisamDocument82 pagesUNIT-3 Robot Drive MechanisamChetuNo ratings yet
- Electrical Actuators Topic 6: Dr. Mahesh S. Narkhede Electrical Engineering Department Government Polytechnic, MumbaiDocument32 pagesElectrical Actuators Topic 6: Dr. Mahesh S. Narkhede Electrical Engineering Department Government Polytechnic, MumbaiVedant .ChavanNo ratings yet
- Lecture 7 DC MachinesDocument16 pagesLecture 7 DC MachinesMohamed HosamNo ratings yet
- Brushless DC MotorDocument19 pagesBrushless DC MotorAnonymous M8PzfJmNo ratings yet
- Chapter 5 - AC Electrical MachinesDocument31 pagesChapter 5 - AC Electrical MachinesIqhfan HarisNo ratings yet
- Advanced Electrical Drives: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument105 pagesAdvanced Electrical Drives: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomNo ratings yet
- Interview QuestionDocument49 pagesInterview Questionshubha christopherNo ratings yet
- CNCDocument63 pagesCNCSahil Bangia100% (1)
- Electrical Actuation SystemDocument78 pagesElectrical Actuation Systemnaughty dela cruzNo ratings yet
- Engineering QuestionsDocument31 pagesEngineering QuestionsRizwan ShahidNo ratings yet
- Unit 3Document88 pagesUnit 3thamizhan4341No ratings yet
- Unit - IIDocument35 pagesUnit - IIthota nagajyothiNo ratings yet
- DC MachinesDocument33 pagesDC Machinesroomdrive04No ratings yet
- DC MachineDocument79 pagesDC Machines231052560No ratings yet
- Automation and Robotics - MODULE 4 - Santhosh AcharyaDocument76 pagesAutomation and Robotics - MODULE 4 - Santhosh AcharyaMadhusudhan N MNo ratings yet
- 메모 0.6Document38 pages메모 0.6emmanuelmuksinNo ratings yet
- Topic 6 - Rotating MachinesDocument43 pagesTopic 6 - Rotating MachinesFarai MasooNo ratings yet
- Classic Control - 1Document63 pagesClassic Control - 1Ahmed ElkhateebNo ratings yet
- DC MotorsDocument45 pagesDC Motorstristan jeff bautistaNo ratings yet
- DC Machines: Saravanan T Y Assistant Professor EEE Department Nararana Engineering College GudurDocument34 pagesDC Machines: Saravanan T Y Assistant Professor EEE Department Nararana Engineering College GudurSaravanan T YNo ratings yet
- DC Machine Me Chapter 1Document55 pagesDC Machine Me Chapter 1Ganyu AyakaNo ratings yet
- SPE 2321 Lecture 3 & 4 and 5Document75 pagesSPE 2321 Lecture 3 & 4 and 5Martinez MutaiNo ratings yet
- SUBTOPIC 1 - Power ElectronicsDocument29 pagesSUBTOPIC 1 - Power ElectronicsJasperNo ratings yet
- LEC - 1aDocument19 pagesLEC - 1aKhalid Abdirashid AbubakarNo ratings yet
- Chapter 6 Electrical Systems and (Lec-15Document41 pagesChapter 6 Electrical Systems and (Lec-15Mohammed AlqbahNo ratings yet
- Lab Presentation: Electrical Drive Systems Presenter: Azmat Ali Matriculation Num: 441430 Topics: AC Motor & Full Wave RectifierDocument22 pagesLab Presentation: Electrical Drive Systems Presenter: Azmat Ali Matriculation Num: 441430 Topics: AC Motor & Full Wave RectifierAhmed IshaqNo ratings yet
- Unit 2 - Electrical Machines (2021!11!28 06-07-55 UTC)Document50 pagesUnit 2 - Electrical Machines (2021!11!28 06-07-55 UTC)bachime13No ratings yet
- Chapter 4 - DC MachineDocument82 pagesChapter 4 - DC Machinepsksiva13No ratings yet
- DC & AC Machines and Speed ControlDocument53 pagesDC & AC Machines and Speed ControlInsane Clown Prince60% (5)
- 19P205 Electrical MachinesDocument34 pages19P205 Electrical Machinessumanthlogn007No ratings yet
- ServomotorDocument25 pagesServomotorAbhirajNo ratings yet
- Measuring Instrument: A Device Used ToDocument34 pagesMeasuring Instrument: A Device Used ToGnanavel GNo ratings yet
- Chapter5 MotorDocument32 pagesChapter5 Motorمحمد فاوذيNo ratings yet
- AC Generators: Prepared By: M.J. ShornaDocument6 pagesAC Generators: Prepared By: M.J. ShornaRehnuma NoorNo ratings yet
- Electrical Drive 2015 RegularDocument64 pagesElectrical Drive 2015 Regularkabtamu mamoNo ratings yet
- MotorDocument32 pagesMotorDeke Elektronik IndustriNo ratings yet
- Mod5 - MECHATRONICS IN ROBOTICSDocument34 pagesMod5 - MECHATRONICS IN ROBOTICSDeepa Ragav RNo ratings yet
- Ece131 Unit3 OverallDocument94 pagesEce131 Unit3 OverallShivanshu PandeyNo ratings yet
- MotorDocument19 pagesMotorRabi khanNo ratings yet
- DC GeneratorsDocument33 pagesDC Generatorsdallisrinivas14No ratings yet
- Power Electronics: Lecture Notes of Power Electronics CourseFrom EverandPower Electronics: Lecture Notes of Power Electronics CourseNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Dr. Babasaheb Ambedkar Technological UniversityDocument5 pagesDr. Babasaheb Ambedkar Technological UniversitySomil wandhareNo ratings yet
- ANT150F2: Fiberglass Collinear Antenna 2.5 DBDDocument1 pageANT150F2: Fiberglass Collinear Antenna 2.5 DBDThuy VI MaiNo ratings yet
- Ophthalmic Lens Materialand DesignDocument42 pagesOphthalmic Lens Materialand DesignHimank RanaNo ratings yet
- Optical Fibers - Measurement of Attenuation Numerical ApertureDocument6 pagesOptical Fibers - Measurement of Attenuation Numerical ApertureSURESH SURAGANINo ratings yet
- Parathom Classic A 75 Adv 11 W 827 E27Document4 pagesParathom Classic A 75 Adv 11 W 827 E27Stan EduardNo ratings yet
- An001 enDocument13 pagesAn001 enQuynh NguyenNo ratings yet
- Fresnel's BiprismDocument6 pagesFresnel's Biprismprateekjain010% (2)
- Datasheet Antenna KRE1012560 - 1Document6 pagesDatasheet Antenna KRE1012560 - 1William Jorge Claros SoriaNo ratings yet
- Ideal AutotransformerDocument10 pagesIdeal AutotransformerBT21EE017 Gulshan RajNo ratings yet
- Chapter 18Document38 pagesChapter 18NewtinhooNo ratings yet
- Determination of Absorption SpectraDocument30 pagesDetermination of Absorption Spectrasay.elleseNo ratings yet
- Polarization, Dispersion and ScatteringDocument5 pagesPolarization, Dispersion and ScatteringSagar RawalNo ratings yet
- Optical MicrosDocument15 pagesOptical MicrosDHASARAIAH SNEHA100% (1)
- Speed Control of DC Motor by Armature Resistance ControlDocument1 pageSpeed Control of DC Motor by Armature Resistance ControlSelf BeliefNo ratings yet
- Optoelectronics and Photonics Principles and Practices 2nd Edition Kasap Solutions Manual 1Document59 pagesOptoelectronics and Photonics Principles and Practices 2nd Edition Kasap Solutions Manual 1julius100% (70)
- 10 6 Fig. 6.1 Is A Full-Scale Diagram That Represents A Sound Wave Travelling in AirDocument2 pages10 6 Fig. 6.1 Is A Full-Scale Diagram That Represents A Sound Wave Travelling in AirhasanNo ratings yet
- Virtual Labs Field Resistance Control SystemDocument1 pageVirtual Labs Field Resistance Control Systemarnabkumarmondal2005No ratings yet
- Reflection and Refraction Questions and AnswersDocument3 pagesReflection and Refraction Questions and AnswersAndreas LambriasNo ratings yet
- Alevel PhysicsDocument4 pagesAlevel PhysicsDora AyeNo ratings yet
- 3.unguided TX MediaDocument44 pages3.unguided TX MediaSwapnil ShindeNo ratings yet
- Science Focus 9 Unit 5 Topic 3Document9 pagesScience Focus 9 Unit 5 Topic 3mills.home.eduNo ratings yet
- Mastery Test ElektromagnetDocument13 pagesMastery Test ElektromagnetChe Hamidah AwangNo ratings yet
- Hospital LightDocument6 pagesHospital LightegawongnaNo ratings yet
- Waves, Sound, and Light MENU: Mechanical Waves Electromagnetic WavesDocument44 pagesWaves, Sound, and Light MENU: Mechanical Waves Electromagnetic WavesMudassir HussainNo ratings yet
- Conversion of GalvanometerDocument13 pagesConversion of GalvanometerSimar Kaur100% (1)
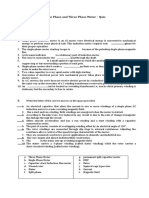
- Single Phase and Three Phase Motor QuizDocument3 pagesSingle Phase and Three Phase Motor QuizMeryL AngNo ratings yet
- Dark80-Fixed-Ww-23441Document1 pageDark80-Fixed-Ww-23441sail1987No ratings yet
- 2 - DiffractionDocument5 pages2 - DiffractionSoma Chowdhury RosyNo ratings yet
- Microbiology and Parasitology: Exercise No. 6Document6 pagesMicrobiology and Parasitology: Exercise No. 6Joshua MendezNo ratings yet