Este documento presenta varios métodos para la síntesis de mecanismos, incluyendo la síntesis del tipo, número y dimensional, la generación de funciones, posiciones de precisión con espaciamiento de Chebychev, y la síntesis de mecanismos de corredera y manivela, manivela y oscilador, y rueda de ginebra. Explica cómo determinar las dimensiones y geometría de estos mecanismos para lograr movimientos deseados.
0 calificaciones0% encontró este documento útil (0 votos)
15 vistas6 páginas
Este documento presenta varios métodos para la síntesis de mecanismos, incluyendo la síntesis del tipo, número y dimensional, la generación de funciones, posiciones de precisión con espaciamiento de Chebychev, y la síntesis de mecanismos de corredera y manivela, manivela y oscilador, y rueda de ginebra. Explica cómo determinar las dimensiones y geometría de estos mecanismos para lograr movimientos deseados.
Este documento presenta varios métodos para la síntesis de mecanismos, incluyendo la síntesis del tipo, número y dimensional, la generación de funciones, posiciones de precisión con espaciamiento de Chebychev, y la síntesis de mecanismos de corredera y manivela, manivela y oscilador, y rueda de ginebra. Explica cómo determinar las dimensiones y geometría de estos mecanismos para lograr movimientos deseados.
Este documento presenta varios métodos para la síntesis de mecanismos, incluyendo la síntesis del tipo, número y dimensional, la generación de funciones, posiciones de precisión con espaciamiento de Chebychev, y la síntesis de mecanismos de corredera y manivela, manivela y oscilador, y rueda de ginebra. Explica cómo determinar las dimensiones y geometría de estos mecanismos para lograr movimientos deseados.
Descargue como DOCX, PDF, TXT o lea en línea desde Scribd
Descargar como docx, pdf o txt
Está en la página 1/ 6
INSTITUTO
TECNOLOGICO DE LEON
ELECTROMECANICA
Análisis y síntesis de mecanismos
Ing. Reporte de síntesis
Daniel Lucio Ávila
José Miguel Salas Frausto Hugo Enrique Puga Martínez SÍNTESIS
El término síntesis cinemática se refiere al diseño o creación de un mecanismo para
Obtener un conjunto deseado de características de movimiento. En vista de la amplísima Variedad de técnicas disponibles, algunas de las cuales suelen ser en extremo Abrumadoras, aquí se presentan algunos de los procedimientos más útiles Para ilustrar la aplicación de la teoría.
Síntesis DEL TIPO, DEL Número y DIMENSIONAL
La síntesis del tipo se refiere a la clase de mecanismo seleccionado; podría ser un Eslabonamiento, un sistema de engranes, bandas y poleas o un sistema de levas. Esta fase inicial del problema total de diseño comprende por lo común factores de Diseño tales como los procesos de manufactura, materiales, seguridad, confiabilidad, espacio y economía. El estudio de la cinemática en general se ocupa sólo Ligeramente te de la síntesis del tipo. La síntesis del número se ocupa del número de eslabones y de articulaciones o Pares que se requieren para obtener una movilidad determinada (véase la sección
Generación de la función generación de la trayectoria y guía del cuerpo
Una clasificación importante de los problemas de síntesis que surge en el diseño de
Los eslabonamientos es la llamada generación de la función. Una de las necesidades Frecuentes en el diseño es la de hacer que un elemento de salida gire, oscile, o tenga Un movimiento alternativo, según una función del tiempo, o bien, una función del Movimiento de entrada especificada. Esto se conoce con el nombre de generación De la función. Un ejemplo sencillo es el de sintetizar un eslabonamiento de cuatro Barras para generar la función y = f (x). En este caso, x representaría el movimiento De la manivela de entrada y el eslabonamiento se diseña de tal modo Que el movimiento del oscilador de salida sea una aproximación de la función y. Otros ejemplos de generación de la función son:
1. En la línea de un transportador. El elemento de salida de un mecanismo se debe Mover a la
velocidad constante del transportador, al mismo tiempo que realiza Cierta operación, por ejemplo, poner un tapón, regresar, recoger el siguiente tapón y repetir la operación.
2. El elemento de salida debe hacer una pausa o detenerse durante su ciclo de movimiento a fin de dar tiempo para que suceda otro evento. El segundo evento podría ser una operación de sellado, engrapado o sujeción de algún tipo.
3. El elemento de salida debe girar a una función de velocidad no uniforme especificada,
porque está acoplada a otro mecanismo que requiere ese movimiento de rotación. POSICIONES DE PRECISIÓN: ESPACIAMIENTO DE CHEBYCHEV
Si 92 es la posición angular del eslabón 2 en un eslabonamiento de cuatro barras, y 94 es la
posición angular del eslabón 4, entonces uno de los problemas de la síntesis cinemática es encontrar las dimensiones del eslabonamiento de tal manera que
En donde f es cualquier relación funcional deseada.
Aunque este problema no se ha resuelto, es posible especificar hasta cinco valores para 92, llamados puntos de precisión, y encontrar en ocasiones un eslabonamiento que satisfaga la r elación deseada para la función y luego seleccionar de dos a cinco puntos de precisión a partir de la grafica para utilizarlos en la síntesis. Si el proceso tiene éxito, la relación funcional se satisface para estos puntos; pero ocurrirán desviaciones en otros. Para muchas funciones, el error más grande se puede mantener a un nivel inferior al 4010. Entre los puntos se presentarán desviaciones, conocidas con el nombre de errores estructurales. U no de los problemas del diseño de eslabonamiento consiste en seleccionar un conjunto de puntos de precisión para utilizarlos en la síntesis, de tal modo que se minimice el error estructural. Como primer tanteo, el mejor espaciamiento de estos puntos es el llamado espaciamiento de Chebychev. Para n puntos en el intervalo Xo s x S Xn+1 el espaciamiento Chebychev, según Freudensteín y. Sandor.
en donde Xi son los puntos de precisión.
SíNTESIS DE POSICIÓN DEL MECANISMO GENERAL DE CORREDERA Y MANIVELA
El mecanismo centrado de corredera y manivela ilustrado en la figura 10-20, tiene una carrera BIB2 igual al doble del radio de la manivela, r2. Como se muestra, se encuentran las posiciones extremas Bl y B2, llamadas también posiciones límite, de la corredera, trazando arcos de círculo con centro en O2 y cuyo radio sea, respectivamente
r3 r2 Y r3 + r2.
En general, el mecanismo centrado de corredera y manivela debe tener a r3 más grande que rz. Sin embargo, el caso especial de r3 = r2 da por resultado un mecanismo isósceles de corredera y manivela en el que la corredera tiene un movimiento alternativo pasando por O2 y la carrera es 4 veces el radio de la manivela.
Todos los puntos del acoplador del mecanismo isósceles de corredera y manivela generan trayectorias elípticas. Las trayectorias generadas por puntos sobre el acoplador del mecanismo de corredera y manivela de la figura 10-20 son no elípticas; pero siempre son simétricas en torno al eje de deslizamiento OzB.
El eslabonamiento de la figura 1O-2b se denomina mecanismo generala excéntrico de
corredera y manivela. Se pueden obtener ciertos efectos especiales, cambiando la distancia de excentricidad e. Por ejemplo, la carrera BIB2 siempre es mayor que el doble del radio de la manivela. Asimismo, el ángulo de la manivela requerido para ejecutar la carrera hacia adelante es diferente del que corresponde a la carrera de retroceso. Se puede aplicar esta característica para sintetizar los mecanismos de retorno rápido, en los que se desea una carrera de trabajo más lenta.
En la figura 1O-2b, nótese que se encuentran las posiciones límite Bl y B2 de la corredera, de la
misma manera que para el de corredera y manivela centrados.
SíNTESIS DE MECANISMOS DE MANIVELA Y OSCILADOR
Las posiciones límite del oscilador, en un mecanismo de manivela y oscilador, están
identificadas como los puntos B1 y B2 en la figura 10-3. Nótese que estas posiciones se encuentran de la misma manera que para el eslabonamiento de corredera y manivela. Obsérvese también que la manivela y el acoplador quedan en una sola recta en cada posición extrema.
En este caso particular, la manivela describe el ángulo 1/1 mientras que el oscilador se mueve de B 1 a B2 describiendo el ángulo f/J. Se observará que, en la carrera de retorno, el oscilador va de B2 de regreso a Bh recorriendo el mismo ángulo pero que la manivela recorre el ángulo 360° -1/1.
Hay muchos casos en los que un mecanismo de manivela y oscilador es superior a un sistema de leva y seguidor. Entre las ventajas que se tienen sobre este último sistema están las fuerzas menores que intervienen, la eliminación del resorte de retención y las holguras menores en virtud del uso de pares de revoluta.
de los movimientos de avance y retorno del oscilador. El primer problema que se presenta en la síntesis de los eslabonamientos de manivela y oscilador es cómo obtener las dimensiones o la geometría que hagan que el mecanismo genere un ángulo de salida especificado 4>, cuando también se especifica la razón de tiempos.
Para sintetizar un mecanismo de manivela y oscilador, para los valores específicos de cb y a,
localícese el punto 04 en la figura 1O-4a y elíjase cualquier longitud deseada del oscilador, '4. Luego trácense las dos posiciones 04B¡ y 04B2 del eslabón 4, separadas por el ángulo cb como se dé. Trácese cualquier recta X que pase por B¡. Entonces, trácese la recta Y que pase por B2, formando el ángulo dado a con X. La intersección de estas dos rectas define la ubicación del pivote de la manivela, O2, Puesto que originalmente se eligió cualquier recta X, existe un número infinito de soluciones para este problema. A continuación, como se observa en las figuras 10-3 y 10-4a, la distancia B2C es 2r2, el doble de la longitud de la manivela. Por tanto, biséquese esta distancia para encontrar '2. Entonces la longitud del acoplador eS'3 OzB¡ - '2. En la figura 10-4b se ilustra el eslabonamiento completado.
MECANISMOS DE MANIVELA-OSCILADO CON ÁNGULO ÓPTIMO DE TRANSMISIÓN
Brodell y Sonit han desarrollado un método analítico para sintetizar el eslabonamiento de
manivela y oscilador en el que la razón de tiempos sea Q 1. El diseño satisface también la condición
en donde l' es el ángulo de transmisión
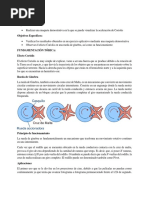
MOVIMIENTO ROTATORIO INTERMITENTE
La rueda de Ginebra, o cruz de Malta, es un mecanismo parecido al de las levas que suministra un movimiento rotatorio intermitente y se emplea profusamente tanto en maquinaria de baj a velocidad como de alta. Aunque originalmente se desarrolló como un tope para evitar dar cuerda en exceso a los relojes, en la actualidad se emplea con amplitud en la maquinaria automática, por ejemplo, cuando se deben marcar distancias determinadas en árboles, torretas o mesas de trabajo. También se utiliza en proyectores de películas para proporcionar el avance intermitente de las mismas.
En la figura 10-31 se muestra un dibujo de un mecanismo de Ginebra de seis ranuras. Nótese
que las líneas de los centros de la ranura y la manivela son mutuamente perpendiculares al encastrarse y al descentrado. La manivela, que casi siempre gira con una velocidad angular uniforme, lleva un rodillo que se encaja en las ranuras. Durante una revolución de la manivela, la rueda de Ginebra gira una fracción de una revolución, cantidad que depende del número de ranuras. El segmento circular que va unido a la manivela realmente evita que la rueda gire cuando el rodillo está descentrado, y también coloca a la rueda para que se efectúe un encaje correcto del rodillo con la siguiente ranura.