GTIER-EMSI 27 - Hydraulique Industrielle Et Pneumatique - Support Électronique
GTIER-EMSI 27 - Hydraulique Industrielle Et Pneumatique - Support Électronique
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- 4 - Pompe D'injection Électronique Bosch VP 30Document43 pages4 - Pompe D'injection Électronique Bosch VP 30cherif100% (12)
- Manuel Atelier Revue Technique KTM 250 SXF Excf 2005 2006 2007 2008Document151 pagesManuel Atelier Revue Technique KTM 250 SXF Excf 2005 2006 2007 2008JimPas encore d'évaluation
- Stage Rexroth ElecDocument85 pagesStage Rexroth ElecAntoine Churin100% (1)
- IntroductionDocument6 pagesIntroductionsalah eddine harketPas encore d'évaluation
- 1# IntroductionDocument5 pages1# Introductionhammardjamel.0Pas encore d'évaluation
- 01 IntroductionDocument6 pages01 IntroductionoussamayounesPas encore d'évaluation
- Partie 1Document17 pagesPartie 1Chahrazad TalebPas encore d'évaluation
- AutoAPI CI - IBIM Chap - 1Document15 pagesAutoAPI CI - IBIM Chap - 1Soma yaPas encore d'évaluation
- Partie 1 Supervision IndustrielleDocument212 pagesPartie 1 Supervision Industriellerajid oumaimaPas encore d'évaluation
- Chapitre 2 - Architecture Des Systèmes Automatisés - UEF3221Document5 pagesChapitre 2 - Architecture Des Systèmes Automatisés - UEF3221Fares Sadi100% (1)
- Architecture Des Systemes AutomatisesDocument71 pagesArchitecture Des Systemes AutomatisesBECHAPas encore d'évaluation
- Automatisme 21Document153 pagesAutomatisme 21FayeMourtalaPas encore d'évaluation
- 01-Cours-Chaine FonctionnelleDocument5 pages01-Cours-Chaine FonctionnelleMohamed HendaouiPas encore d'évaluation
- Entrainements ÉlectriquesDocument5 pagesEntrainements ÉlectriquesYahiyaoui Sofyane100% (1)
- S52 1 Analyse Fonctionnelle Interne Dun SA SyntheseDocument8 pagesS52 1 Analyse Fonctionnelle Interne Dun SA SyntheseyassPas encore d'évaluation
- Cle - Cde - DUT - L1 - 2023Document127 pagesCle - Cde - DUT - L1 - 2023sallymariamadialloPas encore d'évaluation
- CH1 Cmde Des MachinesDocument40 pagesCH1 Cmde Des Machineskadirimar01Pas encore d'évaluation
- Support Cours Khodja PDFDocument77 pagesSupport Cours Khodja PDFEmmad Abdelkarim100% (1)
- 1 Analyse Fonctionnelle - 240124 - 135437Document8 pages1 Analyse Fonctionnelle - 240124 - 135437Abdou Lahat NdiayePas encore d'évaluation
- 00 Api Ladder 2023Document75 pages00 Api Ladder 2023boss.12812Pas encore d'évaluation
- Chapitre%201%20-%20Les%20systemes%20de%20transmission%20d'energieDocument11 pagesChapitre%201%20-%20Les%20systemes%20de%20transmission%20d'energieocelusblackPas encore d'évaluation
- API Chapitre1Document27 pagesAPI Chapitre1nado adjrPas encore d'évaluation
- Automatisme GeneralitéDocument42 pagesAutomatisme GeneraliténoalichahidaPas encore d'évaluation
- Cours Instrumentation Industrielle Inphb 2021 2022 V3Document89 pagesCours Instrumentation Industrielle Inphb 2021 2022 V3rocceli nzoulou100% (3)
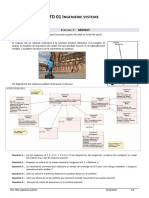
- ANA TD01 - Ingénierie SystèmeDocument8 pagesANA TD01 - Ingénierie Systèmebijhou mcPas encore d'évaluation
- Annalyse Fonctionnelle 2Document5 pagesAnnalyse Fonctionnelle 2meryamPas encore d'évaluation
- Automatismes IndustrielsDocument105 pagesAutomatismes IndustrielsDjamal Zenaidi100% (3)
- TP2 Rached Oueslati Mahdi Sandid Me31Document10 pagesTP2 Rached Oueslati Mahdi Sandid Me31sandidmahdi266Pas encore d'évaluation
- Chap1 Auto Ind 2024Document11 pagesChap1 Auto Ind 2024Rania DoriPas encore d'évaluation
- Partie AUTOMATISMEDocument15 pagesPartie AUTOMATISMELYNDA BOUKELLALPas encore d'évaluation
- Automate ProgrammableDocument26 pagesAutomate ProgrammablebejaouiPas encore d'évaluation
- Commande - Des.machines - Chap1.introduction 2020Document79 pagesCommande - Des.machines - Chap1.introduction 2020Abdø AboulQasimPas encore d'évaluation
- Chapitre 2Document75 pagesChapitre 2Noor BflhPas encore d'évaluation
- Automatisme_-_CopieDocument49 pagesAutomatisme_-_CopieFlorent MakoyiPas encore d'évaluation
- 5 ApiDocument46 pages5 ApiMerazga AmmarPas encore d'évaluation
- CCCT MSDocument161 pagesCCCT MSfanny.menager8Pas encore d'évaluation
- Etude Et Amélioration D'une Découpeuse Des Plaques de JointDocument31 pagesEtude Et Amélioration D'une Découpeuse Des Plaques de JointMoudi BouhlelPas encore d'évaluation
- 03-Conception Ch2Document39 pages03-Conception Ch2aaaboudaPas encore d'évaluation
- 4 CI 07 Ascensseur 3 EtagesDocument5 pages4 CI 07 Ascensseur 3 EtagesOns ZarradPas encore d'évaluation
- Cours 01 AutomatismeDocument20 pagesCours 01 AutomatismenadirPas encore d'évaluation
- Chapitre 1Document8 pagesChapitre 1Najib NettaPas encore d'évaluation
- S1 Chaîne D - Énergie Et D - InformationDocument2 pagesS1 Chaîne D - Énergie Et D - Information11.loikemmanuelPas encore d'évaluation
- Technologie Des ComposantsDocument34 pagesTechnologie Des ComposantsSamuel LavenirPas encore d'évaluation
- Cours 19Document9 pagesCours 19Alex NguemaPas encore d'évaluation
- Automatisme CoursDocument48 pagesAutomatisme CourskoyabePas encore d'évaluation
- Chap1 Lat64Document7 pagesChap1 Lat64riadbouhzila19Pas encore d'évaluation
- PolyTech Tour Poly1 PDFDocument59 pagesPolyTech Tour Poly1 PDFChafik BouguezourPas encore d'évaluation
- Reduct EursDocument10 pagesReduct EursRihabBelgadaPas encore d'évaluation
- Asg 1 Guide de ChoixDocument20 pagesAsg 1 Guide de ChoixSerge RINAUDOPas encore d'évaluation
- TRACTOPELLEDocument17 pagesTRACTOPELLEsandidmahdi266Pas encore d'évaluation
- Cours 19Document9 pagesCours 19badreddinebennouna5Pas encore d'évaluation
- API - Chapter 1Document7 pagesAPI - Chapter 1Meriem SaadPas encore d'évaluation
- Chap1 Generalites Sur Les Entrainements ElectriquesDocument4 pagesChap1 Generalites Sur Les Entrainements ElectriquesSalah PanikaPas encore d'évaluation
- ZZZ 9782340043688Document17 pagesZZZ 9782340043688angolmabaPas encore d'évaluation
- Api 2019-2020Document62 pagesApi 2019-2020Supa DerrickPas encore d'évaluation
- Automatismes GénéralitésDocument42 pagesAutomatismes Généralitéssanabechir75Pas encore d'évaluation
- Chapitre 1 AutoDocument26 pagesChapitre 1 Autoabdosadfi41Pas encore d'évaluation
- Analyse FonctionnelleDocument28 pagesAnalyse FonctionnelleAmina DinariPas encore d'évaluation
- CHAPITRE 1 Introduction À La Commande Des MachinesDocument16 pagesCHAPITRE 1 Introduction À La Commande Des MachinesKai GunterPas encore d'évaluation
- Analyse Fonctionnelle 2021 PDFDocument7 pagesAnalyse Fonctionnelle 2021 PDFOuechtati MounirPas encore d'évaluation
- Analyse Fonctionnelle 2021 PDFDocument7 pagesAnalyse Fonctionnelle 2021 PDFOuechtati MounirPas encore d'évaluation
- Systeme Common RailDocument20 pagesSysteme Common RailLuc Mutombo Mukulu75% (4)
- Généralité Sur Le Moteur ThermiqueDocument35 pagesGénéralité Sur Le Moteur ThermiqueDieuvoulu Asemba MondengePas encore d'évaluation
- Pompe À Pistons Axiaux À Cylindrée Variable A10VO, A10VSO: Série 31Document64 pagesPompe À Pistons Axiaux À Cylindrée Variable A10VO, A10VSO: Série 31Alfredo Alonso LòpezPas encore d'évaluation
- Manuel de Reparations LDW 442 CRSDocument144 pagesManuel de Reparations LDW 442 CRSMussardPas encore d'évaluation
- Catalogue EnerpacDocument16 pagesCatalogue EnerpacFirstproPas encore d'évaluation
- Catalogue BudRacing 2011Document228 pagesCatalogue BudRacing 2011fab62620Pas encore d'évaluation
- Nissan Pcb-Nes-16-050 TraduiteDocument14 pagesNissan Pcb-Nes-16-050 Traduiteapi-142522448Pas encore d'évaluation
- Kyb 48u Fork 46 ShockDocument22 pagesKyb 48u Fork 46 ShockCarla VagosPas encore d'évaluation
- SSP 652 Audi Moteur V8 TDI de La Gamme EA898 PDFDocument48 pagesSSP 652 Audi Moteur V8 TDI de La Gamme EA898 PDFJonas LuciusPas encore d'évaluation
- 1 Transformation de MouvementDocument8 pages1 Transformation de MouvementlauriaouedraogoPas encore d'évaluation
- Turbocompresseur PDFDocument2 pagesTurbocompresseur PDFmecanosimo100% (2)
- Les Pompes A Motricite Humaine: de L'eauDocument44 pagesLes Pompes A Motricite Humaine: de L'eauAbdoul Mouhaïmine OuedraogoPas encore d'évaluation
- MF Hydraulique Case TP FRDocument245 pagesMF Hydraulique Case TP FRFrank BullitPas encore d'évaluation
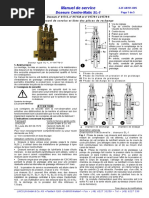
- Injecteurs SL-1 - Doc 42F68351D05Document5 pagesInjecteurs SL-1 - Doc 42F68351D05leaw81Pas encore d'évaluation
- rakotonoelisonAndonirinaM ESPA ING 14Document108 pagesrakotonoelisonAndonirinaM ESPA ING 14Sabrine Ben HmidaPas encore d'évaluation
- Man108931 De. La XMDocument321 pagesMan108931 De. La XMdamienm49100% (1)
- Classification Des Moteurs ThermiquesDocument5 pagesClassification Des Moteurs ThermiquesGuy Ygal0% (1)
- GdHI V5Document4 pagesGdHI V5youcef mokranePas encore d'évaluation
- Dossier Technique Pompe DoseuseDocument11 pagesDossier Technique Pompe Doseuseriden768377Pas encore d'évaluation
- Exercice S 4Document6 pagesExercice S 4YoucefGMAPas encore d'évaluation
- 09-Technologie Des Appareils FrigorifiquesDocument10 pages09-Technologie Des Appareils FrigorifiquesAmeni Ben Amor100% (1)
- PoinconneuseDocument8 pagesPoinconneuseHenry P100% (1)
- Tsdeea FF 2019 TP v1 v20Document30 pagesTsdeea FF 2019 TP v1 v20Hicham Er-roufiPas encore d'évaluation
- Moteur Lombardini EssenceDocument110 pagesMoteur Lombardini EssenceJeanFrancoisFigueroaPas encore d'évaluation
- Mutombo Panzwa Steve RapportDocument33 pagesMutombo Panzwa Steve RapportSamsteve MutomboPas encore d'évaluation
- bm6204 Conception Des Circuits D'eauDocument10 pagesbm6204 Conception Des Circuits D'eaubirelmaghhbrPas encore d'évaluation
- 02 Doosan Stage IIIB Common Rail Engines (DPF Aftertreat) 20160104AC FRDocument83 pages02 Doosan Stage IIIB Common Rail Engines (DPF Aftertreat) 20160104AC FRlucas.dafonsecaPas encore d'évaluation