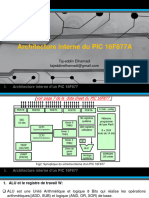
Ab Pic 16F84
Ab Pic 16F84
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Corrige TD Microcontroleur Pic 16f84Document11 pagesCorrige TD Microcontroleur Pic 16f84HamdiHa92% (109)
- Microsoft Project 2016 Prise en Main IseigDocument2 pagesMicrosoft Project 2016 Prise en Main IseigTopina Rahim100% (2)
- Hachers TD2Document4 pagesHachers TD2Kamal PcPas encore d'évaluation
- 3 Exercices Réponses FréquentiellesDocument15 pages3 Exercices Réponses FréquentiellesKamal PcPas encore d'évaluation
- Architecture Et Programmation Des Micro-Contrôleurs: Khaled - Taouil@enetcom - Usf.tnDocument47 pagesArchitecture Et Programmation Des Micro-Contrôleurs: Khaled - Taouil@enetcom - Usf.tnamalPas encore d'évaluation
- Cours 68 HC 11 V 31Document55 pagesCours 68 HC 11 V 31Zineddine El Mehdi MustaphaPas encore d'évaluation
- Le PIC 16F628 Resume JCDocument5 pagesLe PIC 16F628 Resume JChassna ait aliPas encore d'évaluation
- 68hc11 v2 PDFDocument17 pages68hc11 v2 PDFmoutchedPas encore d'évaluation
- Pic 2Document49 pagesPic 2jugurthaPas encore d'évaluation
- Tdii2 PIC18F 2009Document40 pagesTdii2 PIC18F 2009Ahmed MellouliPas encore d'évaluation
- Compte Rendu - Info Indus - TP1 + TP2Document11 pagesCompte Rendu - Info Indus - TP1 + TP2Mziou HammadiPas encore d'évaluation
- Microcontroleur Harvard Pic16f84 - CompressDocument5 pagesMicrocontroleur Harvard Pic16f84 - CompressMeziane BelkacemPas encore d'évaluation
- DS - 20-21 - Info Indus - Énoncé+correctionDocument9 pagesDS - 20-21 - Info Indus - Énoncé+correctionAbdeLilah Ait TajerPas encore d'évaluation
- 2BACSTE - Pic 16F84 Et Pic 16F877 - RACHID BOUTSAIDDocument25 pages2BACSTE - Pic 16F84 Et Pic 16F877 - RACHID BOUTSAIDAFAD100% (1)
- TP1 4Document22 pagesTP1 4Abderrahmane WrPas encore d'évaluation
- Initiation Aux Microcontrôleurs: Application Au 68HC11: Chapitre 3Document11 pagesInitiation Aux Microcontrôleurs: Application Au 68HC11: Chapitre 3Salma sahmad100% (2)
- Chapitre 4Document37 pagesChapitre 4Ahmed JguirimPas encore d'évaluation
- AnnexeA PICDocument7 pagesAnnexeA PICabdouzaouiidrissiPas encore d'évaluation
- Cours PICDocument14 pagesCours PICNouhaila AIT HaddouPas encore d'évaluation
- Utiliser Les PIC 16F Et 18F Architecture Du 16F84Document6 pagesUtiliser Les PIC 16F Et 18F Architecture Du 16F84Harzly HajerPas encore d'évaluation
- Microcontrôleur Famille PIC 16oDocument10 pagesMicrocontrôleur Famille PIC 16oAbdellah Faqdani100% (1)
- Microcontroleur PIC16F84Document33 pagesMicrocontroleur PIC16F84redaPas encore d'évaluation
- Chap 3-MicrocontroleurDocument35 pagesChap 3-MicrocontroleurYosra rhim YosraPas encore d'évaluation
- Cours Microcontrôleur MCS-51Document19 pagesCours Microcontrôleur MCS-51Maha BadriPas encore d'évaluation
- Cours AUT AII M1 SESTRDocument29 pagesCours AUT AII M1 SESTRichrak.djelil.idPas encore d'évaluation
- C Partie1Document4 pagesC Partie1Smirnov ArtaéévPas encore d'évaluation
- Chapitre V MicroprocesseurDocument10 pagesChapitre V MicroprocesseurMouhamed MoustaphaPas encore d'évaluation
- Cours-PIC Mise A JourDocument69 pagesCours-PIC Mise A JourAmil DhafPas encore d'évaluation
- Pic16f877 150125131206 Conversion Gate01Document44 pagesPic16f877 150125131206 Conversion Gate01Harzly HajerPas encore d'évaluation
- Le Microcontroleur PIC16F876Document13 pagesLe Microcontroleur PIC16F876hmema13Pas encore d'évaluation
- 065 Le Microprocesseur-1Document33 pages065 Le Microprocesseur-1Martin LéonardPas encore d'évaluation
- Uc-16F877 DIADocument14 pagesUc-16F877 DIAPapeCheikh SYLLAPas encore d'évaluation
- Architecture Et Fonctionnement Du Microcontrôleur PIC 16F84Document48 pagesArchitecture Et Fonctionnement Du Microcontrôleur PIC 16F84Abdelkader Idrissi ZaouiPas encore d'évaluation
- Traiter 2 SteDocument50 pagesTraiter 2 SteFadwa GHANIPas encore d'évaluation
- 2015 08 21 TD32 Le Microprocesseur 0708S1Document4 pages2015 08 21 TD32 Le Microprocesseur 0708S1Mēđ GouigaPas encore d'évaluation
- Chapitre 3 Le Microcontroleur Pic 16f84Document29 pagesChapitre 3 Le Microcontroleur Pic 16f84Samen LempirePas encore d'évaluation
- Calculateur Et InterfacageDocument9 pagesCalculateur Et InterfacageWissam TizaPas encore d'évaluation
- Calculateur Et InterfacageDocument18 pagesCalculateur Et InterfacageLynda MOKRANIPas encore d'évaluation
- Initiation Aux Microcontrôleurs dsPIC30FDocument10 pagesInitiation Aux Microcontrôleurs dsPIC30Fanon_72023590100% (1)
- Automate Programmable Industriel PDFDocument6 pagesAutomate Programmable Industriel PDFSD BNPas encore d'évaluation
- Architecture Interne Du PIC16F877ADocument18 pagesArchitecture Interne Du PIC16F877AhajarelbekaryPas encore d'évaluation
- MicrocontroleurDocument6 pagesMicrocontroleurFadil TelejeuPas encore d'évaluation
- PIC16F84Document22 pagesPIC16F84Rida bellarranePas encore d'évaluation
- CoursMP 1 ETL427Document24 pagesCoursMP 1 ETL427dbPas encore d'évaluation
- 1.microcontroleur Partie 1Document13 pages1.microcontroleur Partie 1fayeousseynou471Pas encore d'évaluation
- Architecture Zero4Document110 pagesArchitecture Zero4Seydou TallaPas encore d'évaluation
- DSPIC30FDocument51 pagesDSPIC30Fouss18Pas encore d'évaluation
- 5- Exemple d'Architecture CISC-68HC11Document26 pages5- Exemple d'Architecture CISC-68HC11wadesidickPas encore d'évaluation
- Cours Pics16f877 PDFDocument113 pagesCours Pics16f877 PDFBày RémPas encore d'évaluation
- Chapitre 1 Lat 54Document6 pagesChapitre 1 Lat 54radiaPas encore d'évaluation
- TP 1, Initiation A La Programmation Du Pic 16F877A Premiere Approche Des Logiciels UtilisesDocument6 pagesTP 1, Initiation A La Programmation Du Pic 16F877A Premiere Approche Des Logiciels UtilisesNaima BajouPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 51Document18 pagesCours Microcontrôleur Microprocesseur 51NasriMohsenPas encore d'évaluation
- Pic 16F84 2Document40 pagesPic 16F84 2felkirPas encore d'évaluation
- L2 Etude de CasDocument49 pagesL2 Etude de CasÇhøčø LãtãPas encore d'évaluation
- MODULE N°09 TLC-BTS MicrocontrôleursDocument28 pagesMODULE N°09 TLC-BTS MicrocontrôleursWalid MahmoudPas encore d'évaluation
- Cour MicrocontroleurDocument12 pagesCour MicrocontroleurToky RakotonirinaPas encore d'évaluation
- Chapitre 5 MicrocontroleursDocument28 pagesChapitre 5 Microcontroleursbenachour ismailPas encore d'évaluation
- Le Pic 16f84aDocument23 pagesLe Pic 16f84aOMAR ENNAJIPas encore d'évaluation
- Informatique physique: Explorer la vision par ordinateur dans l'informatique physiqueD'EverandInformatique physique: Explorer la vision par ordinateur dans l'informatique physiquePas encore d'évaluation
- Profil de couleur: Explorer la perception et l'analyse visuelles en vision par ordinateurD'EverandProfil de couleur: Explorer la perception et l'analyse visuelles en vision par ordinateurPas encore d'évaluation
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- Inspection optique automatisée: Avancées de la technologie de vision par ordinateurD'EverandInspection optique automatisée: Avancées de la technologie de vision par ordinateurPas encore d'évaluation
- VAUTROT 2012 ArchivageDocument187 pagesVAUTROT 2012 ArchivageKamal PcPas encore d'évaluation
- Exercice 1Document3 pagesExercice 1Kamal PcPas encore d'évaluation
- Travaux Pratique n1Document6 pagesTravaux Pratique n1Kamal PcPas encore d'évaluation
- Brevet Technicien Supérieur - CopieDocument7 pagesBrevet Technicien Supérieur - CopieKamal PcPas encore d'évaluation
- Fiche Torseurs Cinematiques Et Statiques Des Liaisons Usuelles Parfaites MKDocument5 pagesFiche Torseurs Cinematiques Et Statiques Des Liaisons Usuelles Parfaites MKKamal PcPas encore d'évaluation
- Fonctions de Distribution en Développement Limité: Ingénieur Hydrologue À 1'O.R.S.T.O.MDocument31 pagesFonctions de Distribution en Développement Limité: Ingénieur Hydrologue À 1'O.R.S.T.O.MKamal PcPas encore d'évaluation
- 2 Réponses Temporelles ExercicesDocument2 pages2 Réponses Temporelles ExercicesKamal PcPas encore d'évaluation
- USINAGEESAUntitled 2Document17 pagesUSINAGEESAUntitled 2Kamal PcPas encore d'évaluation
- Arcs 2016Document15 pagesArcs 2016Kamal PcPas encore d'évaluation
- vfMétrologie Mã©canique EsaDocument8 pagesvfMétrologie Mã©canique EsaKamal PcPas encore d'évaluation
- 5 Exercices CorrectionDocument10 pages5 Exercices CorrectionKamal PcPas encore d'évaluation
- Essais Et Proprietes Mécaniques Des MatériauxDocument28 pagesEssais Et Proprietes Mécaniques Des MatériauxKamal PcPas encore d'évaluation
- 4 Évaluation Des Performances Des Systèmes AsservisDocument42 pages4 Évaluation Des Performances Des Systèmes AsservisKamal PcPas encore d'évaluation
- TD Hacheurs 2bts EsaDocument8 pagesTD Hacheurs 2bts EsaKamal PcPas encore d'évaluation
- Audit QualiteDocument5 pagesAudit QualiteKamal PcPas encore d'évaluation
- 5 Correction - CopieDocument48 pages5 Correction - CopieKamal PcPas encore d'évaluation
- Cours8 Modèle MASDocument26 pagesCours8 Modèle MASKamal PcPas encore d'évaluation
- Cinematique Du SolideDocument20 pagesCinematique Du SolideKamal PcPas encore d'évaluation
- 3 RDMPRFDocument18 pages3 RDMPRFKamal PcPas encore d'évaluation
- 1 Table TLDocument2 pages1 Table TLKamal PcPas encore d'évaluation
- CNC 2020 GM TSIDocument13 pagesCNC 2020 GM TSIKamal PcPas encore d'évaluation
- Guidage en Translation Doc ElvDocument5 pagesGuidage en Translation Doc ElvKamal PcPas encore d'évaluation
- Exercice - Fusibles Am Et GG CORRECTIONDocument1 pageExercice - Fusibles Am Et GG CORRECTIONKamal PcPas encore d'évaluation
- Can CnaDocument12 pagesCan CnaKamal PcPas encore d'évaluation
- Silkan Polycopie CompilationDocument54 pagesSilkan Polycopie CompilationYassine HansaliPas encore d'évaluation
- Corrigé Type Examen Module POO Univ Tizi-Ouzou 2014-2015Document6 pagesCorrigé Type Examen Module POO Univ Tizi-Ouzou 2014-2015sifPas encore d'évaluation
- Jeux Vanille V0.4Document13 pagesJeux Vanille V0.4ar_scribdcomPas encore d'évaluation
- Risques IT Et RéponsesDocument2 pagesRisques IT Et RéponsesnannieaurellPas encore d'évaluation
- Colenta X Aqs FR 02 2019Document166 pagesColenta X Aqs FR 02 2019Anonymous KKSGFIZP7PPas encore d'évaluation
- Genie Logicel Partie1Document2 pagesGenie Logicel Partie1Sarah CharefPas encore d'évaluation
- Diapo Equa DiffDocument32 pagesDiapo Equa DiffErwan EngammarePas encore d'évaluation
- Trixbox - Installation Et Configuration Avec Softphone - Autres - IT-ConnectDocument20 pagesTrixbox - Installation Et Configuration Avec Softphone - Autres - IT-ConnectoswaldakpagbePas encore d'évaluation
- Mixage Et Monitoring Audio YamahaDocument5 pagesMixage Et Monitoring Audio YamahaSaid GedeonPas encore d'évaluation
- 11 - Exercices - SolutionsDocument8 pages11 - Exercices - SolutionsSamir Zit100% (1)
- Chapitre I CNC Master 2 ELM Année 2022Document10 pagesChapitre I CNC Master 2 ELM Année 2022Dalton Brendan NcubePas encore d'évaluation
- Ascensseur 300Kg R+5Document21 pagesAscensseur 300Kg R+5Blondel FankamPas encore d'évaluation
- TH3311Document199 pagesTH3311franckPas encore d'évaluation
- Rglement Gnral TOTOFOOTDocument9 pagesRglement Gnral TOTOFOOTvannn123Pas encore d'évaluation
- Guide Outil Auto Evaluation SPEC 2217 V1Document3 pagesGuide Outil Auto Evaluation SPEC 2217 V1sahraouihajer1993Pas encore d'évaluation
- Table Des MatieresDocument20 pagesTable Des MatieresRahim AbbaPas encore d'évaluation
- TD - Preparation ExamDocument7 pagesTD - Preparation ExamAwichoux TraorePas encore d'évaluation
- TD8 AcmDocument9 pagesTD8 Acmsabir MoussaouiPas encore d'évaluation
- Analyse Forensique Tout en MemoireDocument33 pagesAnalyse Forensique Tout en Memoirerobot_123Pas encore d'évaluation
- Synthese Vocale DarijaDocument74 pagesSynthese Vocale DarijatarekPas encore d'évaluation
- Ex 04Document8 pagesEx 04Mohamed MOHAMED SALEM HAYBALLAPas encore d'évaluation
- Simulateur Logiciel de L'Anomaloscope de NagelDocument22 pagesSimulateur Logiciel de L'Anomaloscope de NagelDoct Jean-Dadet DiasolukaPas encore d'évaluation
- Chiffrement Suci PW Groux Boyer CailleauDocument10 pagesChiffrement Suci PW Groux Boyer CailleauFrederic LaunayPas encore d'évaluation
- Fiche TP 3Document4 pagesFiche TP 3Abdel MadjidPas encore d'évaluation
- TP 1Document4 pagesTP 1unfair deathPas encore d'évaluation
- Chapitre3 DatabricksDocument29 pagesChapitre3 Databrickssafia fezaiPas encore d'évaluation
- Laboratoire Microsoft SUPINFO 2010, 1st ProjectDocument26 pagesLaboratoire Microsoft SUPINFO 2010, 1st ProjectMickaelGOETZPas encore d'évaluation
- Chapitre 4: Normalisation D'une Base de Données RelationnelleDocument24 pagesChapitre 4: Normalisation D'une Base de Données RelationnelleyadohoPas encore d'évaluation
- CV Basma FAJOUI Glob Francais DevDocument1 pageCV Basma FAJOUI Glob Francais Devayoubbalkaz66Pas encore d'évaluation