Cours 9
Cours 9
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
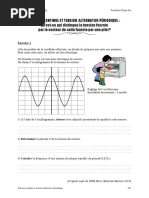
- Exercices Tension Continue Et Tension Alternative Periodique TroisiemeDocument6 pagesExercices Tension Continue Et Tension Alternative Periodique Troisiemeanas fekri100% (2)
- Mini Projet: Modélisation (Et Simulink) Du MSAPDocument18 pagesMini Projet: Modélisation (Et Simulink) Du MSAPayoub93% (45)
- Chapitre 1 Modélisation de La Machine Asynchrone Double Étoile Et Son AlimentationDocument38 pagesChapitre 1 Modélisation de La Machine Asynchrone Double Étoile Et Son AlimentationOmari GE50% (4)
- TP Commande ScalaireDocument24 pagesTP Commande ScalaireOkba100% (1)
- TP Commande Des MachinesDocument21 pagesTP Commande Des MachinesTa Divika Hasterivy100% (1)
- TP Variateur Des VitesseDocument8 pagesTP Variateur Des VitesseAhmed SaidPas encore d'évaluation
- MOCN ProjetDocument10 pagesMOCN Projetboubeghla nadirPas encore d'évaluation
- Cours TD Commande Des Entrainements ÉlectromecaniquesDocument31 pagesCours TD Commande Des Entrainements ÉlectromecaniquesKIDS APP100% (5)
- Réglage de La Vitesse de RotationtDocument13 pagesRéglage de La Vitesse de RotationtMELLALPas encore d'évaluation
- Modélisation Par Représentation D'état de La MAS Avec SimulinkDocument11 pagesModélisation Par Représentation D'état de La MAS Avec SimulinkMohammed Reda GailaPas encore d'évaluation
- TP 03 Commande Des Machines ElectriquesDocument14 pagesTP 03 Commande Des Machines Electriquesmoustapha.lahi04Pas encore d'évaluation
- McccorDocument6 pagesMcccorcavasquePas encore d'évaluation
- Historique: I.1 Eléments Constituant de La Machine AsynchroneDocument12 pagesHistorique: I.1 Eléments Constituant de La Machine Asynchronebenke manouPas encore d'évaluation
- TP01commandeF (Enregistré Automatiquement) PDFDocument9 pagesTP01commandeF (Enregistré Automatiquement) PDFKhouloud BoukhechimaPas encore d'évaluation
- Electrotechnique EEA TP7 SujetDocument7 pagesElectrotechnique EEA TP7 SujetSalmeMeztouPas encore d'évaluation
- Machines Électriques 4: Comptes Rendus Des Travaux Pratiques (Essais Et Mesures)Document22 pagesMachines Électriques 4: Comptes Rendus Des Travaux Pratiques (Essais Et Mesures)Amr AmrPas encore d'évaluation
- Machine Asynchrone TolotraDocument11 pagesMachine Asynchrone TolotraManoaPas encore d'évaluation
- Le Moteur Asynchrone TriphaseDocument8 pagesLe Moteur Asynchrone TriphaseaminePas encore d'évaluation
- Cours Commande Des MCC 2023-2024Document14 pagesCours Commande Des MCC 2023-2024Xavier N'guessanPas encore d'évaluation
- Commande Foc MsapDocument22 pagesCommande Foc MsapKais AyadiPas encore d'évaluation
- Cours Elm M1 MCCDocument8 pagesCours Elm M1 MCCAbdo AbdoPas encore d'évaluation
- Etude D'une ÉolienneDocument24 pagesEtude D'une Éoliennediablos300100% (5)
- Variation de Vitesse Des MCCDocument8 pagesVariation de Vitesse Des MCCSmirnov Artaéév100% (1)
- CH1 Introduction A La Commande Des Machines Electriques A Courant ContinuDocument65 pagesCH1 Introduction A La Commande Des Machines Electriques A Courant ContinumarPas encore d'évaluation
- La Variation de Vitesse - TechnologieDocument6 pagesLa Variation de Vitesse - TechnologiehichamPas encore d'évaluation
- TP: Machine A Courant ContinueDocument9 pagesTP: Machine A Courant Continuerachid aekPas encore d'évaluation
- Commande MASDocument90 pagesCommande MASSofiane DouidaPas encore d'évaluation
- Les Machines AsynchronesDocument20 pagesLes Machines Asynchronesbedoui marwenPas encore d'évaluation
- IntroductionDocument8 pagesIntroductionMezine SohaibPas encore d'évaluation
- Machine À Courant Continu - WikipédiaDocument28 pagesMachine À Courant Continu - WikipédiaNantenaina Jacques BerthinoPas encore d'évaluation
- TP5 Cours Moteur Eleve PDFDocument19 pagesTP5 Cours Moteur Eleve PDFImene100% (1)
- Chapitre 3 Entrainements ElectriquesDocument29 pagesChapitre 3 Entrainements Electriquesdanazevedo82Pas encore d'évaluation
- Dimensionnement Sys Ind Partie1 ResumeDocument17 pagesDimensionnement Sys Ind Partie1 Resumeaminemilev43Pas encore d'évaluation
- Chap1la Variation de Vitesse-2Document6 pagesChap1la Variation de Vitesse-2مفتاح الدينPas encore d'évaluation
- Cours MSAP M2ME UMBB 2022Document51 pagesCours MSAP M2ME UMBB 2022Aklil MPas encore d'évaluation
- Machine SynchroneDocument21 pagesMachine SynchroneBlack HbPas encore d'évaluation
- Sans Nom 1Document10 pagesSans Nom 1Main VertePas encore d'évaluation
- Alternateur: Faraday Induction Électromagnétique Courants Électriques AlternatifsDocument18 pagesAlternateur: Faraday Induction Électromagnétique Courants Électriques AlternatifsChaouki BraikiaPas encore d'évaluation
- La Variation de VitesseDocument6 pagesLa Variation de Vitessenajim68Pas encore d'évaluation
- Kanda 1Document25 pagesKanda 1elimukengomaPas encore d'évaluation
- Réglage de La Vitesse de RotationDocument13 pagesRéglage de La Vitesse de Rotationous1990Pas encore d'évaluation
- Cours CMEDocument39 pagesCours CMEHaidra HaidraPas encore d'évaluation
- commandes des machines electriques 2024Document30 pagescommandes des machines electriques 2024Fouad DeaiPas encore d'évaluation
- Chapitre 1 (Introduction Générales) AthmaniDocument18 pagesChapitre 1 (Introduction Générales) AthmaniSamroura YessadPas encore d'évaluation
- Ass Mach Conv 1erchpDocument11 pagesAss Mach Conv 1erchpamine milanoPas encore d'évaluation
- Chap 04Document17 pagesChap 04nadirjudoka123Pas encore d'évaluation
- TP2finalDocument20 pagesTP2finalFatima zahra ElmamouniPas encore d'évaluation
- 1 - TD. Energie PerpetuelleDocument4 pages1 - TD. Energie PerpetuelleMohammed EssabbarPas encore d'évaluation
- Elta tp2Document11 pagesElta tp2Sirine Ines BOUCEKINEPas encore d'évaluation
- TP 6 Machines Electriques 2Document7 pagesTP 6 Machines Electriques 2REZOPas encore d'évaluation
- Moteur AsynchroneDocument9 pagesMoteur AsynchroneYassine ZaharPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza Nabil100% (1)
- Chapitre 3Document50 pagesChapitre 3Hamza KADDOURPas encore d'évaluation
- Asservissement de Vitesse D'une Charge Entrainée Par Un Moteur À Courant Continu, À Excitation Séparée ConstanteDocument24 pagesAsservissement de Vitesse D'une Charge Entrainée Par Un Moteur À Courant Continu, À Excitation Séparée ConstanteAlfredho ShactarPas encore d'évaluation
- TP 03 NchafDocument16 pagesTP 03 NchafhadjmedyousraPas encore d'évaluation
- Modelisation CMD MSAPDocument35 pagesModelisation CMD MSAPKoukou AmkoukouPas encore d'évaluation
- L’énergie éolienne: Cours, exercices et problèmes corrigésD'EverandL’énergie éolienne: Cours, exercices et problèmes corrigésPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Travaux Pratiques Les Capteurs PDFDocument44 pagesTravaux Pratiques Les Capteurs PDFCitation Du Jour100% (2)
- LoisDocument2 pagesLoisthegsaad2Pas encore d'évaluation
- Cours Capteurs1Document55 pagesCours Capteurs1Chaouki GuesmiPas encore d'évaluation
- 2 ÉlectromagnétismeDocument19 pages2 ÉlectromagnétismeBouterbiat DPas encore d'évaluation
- Justification Des PrixDocument2 pagesJustification Des Prixegp.betPas encore d'évaluation
- Chapitre 3 Dynamique LagrangienneV1 (1)Document12 pagesChapitre 3 Dynamique LagrangienneV1 (1)e.tanoPas encore d'évaluation
- 12 - Applications (Mouvement Plan)Document5 pages12 - Applications (Mouvement Plan)youssefoutter22Pas encore d'évaluation
- LTM1220-5.2 Data + 4 Ton 05.2014 3Document66 pagesLTM1220-5.2 Data + 4 Ton 05.2014 3Paweł MatuszakPas encore d'évaluation
- Capteurs de Température Exercices PDFDocument5 pagesCapteurs de Température Exercices PDFIspac LorentiPas encore d'évaluation
- France Air Noumea NT - 2408 - 82Document58 pagesFrance Air Noumea NT - 2408 - 82Razvan Gabriel DinuPas encore d'évaluation
- Mge 00051Document53 pagesMge 00051أبو كعب علاء الدينPas encore d'évaluation
- Circutor - R3 - 03Document24 pagesCircutor - R3 - 03António OliveiraPas encore d'évaluation
- 4 Bilan Thermique D Une Salle de ClasseDocument6 pages4 Bilan Thermique D Une Salle de ClasseHraiech Ibtissem100% (1)
- Séance 5 GIL2Document27 pagesSéance 5 GIL2chihaoui abdelhamidPas encore d'évaluation
- BEPMasse Molaire MoleculaireDocument3 pagesBEPMasse Molaire Moleculairesana latifiPas encore d'évaluation
- Rapport de Stage PDFDocument20 pagesRapport de Stage PDFbochraPas encore d'évaluation
- Texte Modele Sciences PhysiqueDocument1 pageTexte Modele Sciences PhysiqueMarckenley0% (1)
- Rappport 2 1Document17 pagesRappport 2 1francklin powell nikiemaPas encore d'évaluation
- Cours 001 Structure D'une Installation ÉlectriqueDocument10 pagesCours 001 Structure D'une Installation ÉlectriqueSou Tibon100% (1)
- Sun Module SolarworldDocument10 pagesSun Module SolarworldSINES FrancePas encore d'évaluation
- Chapitre1 Effet PhotoelectriqueDocument21 pagesChapitre1 Effet Photoelectriquezekimazouz121Pas encore d'évaluation
- EPUROMADocument1 pageEPUROMAMohamed MOUKHTARIAPas encore d'évaluation
- Poids Et MasseDocument3 pagesPoids Et MassenutsugadjifaPas encore d'évaluation
- Guide de L'expert Basse TensionDocument52 pagesGuide de L'expert Basse TensionLeonard Da PrudyPas encore d'évaluation
- DM OpuDocument15 pagesDM Opuzakaria aouamPas encore d'évaluation
- Chaudière À Tubes D'eauDocument2 pagesChaudière À Tubes D'eauChouYa OsPas encore d'évaluation
- Chapitre 3 Les Schémas de Liaison À La Terre - Avec - SonDocument11 pagesChapitre 3 Les Schémas de Liaison À La Terre - Avec - SonWerghui AbderahimPas encore d'évaluation
- NDC RadierDocument3 pagesNDC RadierjutolePas encore d'évaluation
- TD01 SemiconducteursDocument4 pagesTD01 SemiconducteursGoldFreindPas encore d'évaluation