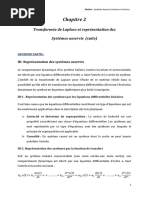
cour esserv 02
cour esserv 02
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Asservissement Échantillonné PDFDocument79 pagesAsservissement Échantillonné PDFFabrice FotsoPas encore d'évaluation
- Ch 2_Transformée de LaplaceDocument16 pagesCh 2_Transformée de LaplaceAbdelghani MokhtariPas encore d'évaluation
- Chapitre2 Systèmes AsservisDocument14 pagesChapitre2 Systèmes AsservisEmmanuel Kawalina KatalikoPas encore d'évaluation
- Chapitre v Systémes AsservisDocument10 pagesChapitre v Systémes Asservisdicherd MOUANDAPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2Hafa ApbPas encore d'évaluation
- Chapitre 3Document20 pagesChapitre 3j7g9yk6vnvPas encore d'évaluation
- Corrigé EX1 TD BahattiDocument7 pagesCorrigé EX1 TD Bahattisanamarzouq366Pas encore d'évaluation
- Chp2 TransforméeLAPLACE-SLIDocument8 pagesChp2 TransforméeLAPLACE-SLIYattePas encore d'évaluation
- Transformée de Laplace ELN 3Document13 pagesTransformée de Laplace ELN 3DocPas encore d'évaluation
- Chapitre N°2 - Transformée de LaplaceDocument31 pagesChapitre N°2 - Transformée de Laplaceybel615Pas encore d'évaluation
- Chapitre 2 transformation de laplaceDocument14 pagesChapitre 2 transformation de laplaceamohamge05saPas encore d'évaluation
- Chapitre 3 modélisation de systeme asservieDocument22 pagesChapitre 3 modélisation de systeme asservieamohamge05saPas encore d'évaluation
- 2 Formalisme de LaplaceDocument26 pages2 Formalisme de LaplaceMeryem AoufyPas encore d'évaluation
- Chapitre 3Document5 pagesChapitre 3Ammar DridiPas encore d'évaluation
- Mécanque Quantique I - Corrigé TD 2 - 1Document6 pagesMécanque Quantique I - Corrigé TD 2 - 1fatima benfrihaPas encore d'évaluation
- Chapitre I Autmatique 1Document10 pagesChapitre I Autmatique 1ambusiness052021Pas encore d'évaluation
- Série de TD N Math 5Document6 pagesSérie de TD N Math 5The Algerianman100% (1)
- 2 Modèle FrequentielDocument19 pages2 Modèle FrequentielLaurenne YaoPas encore d'évaluation
- TD AutomatiqueDocument2 pagesTD AutomatiqueAmadou Abdoulaye DIENGPas encore d'évaluation
- TD Asservissement Série1Document7 pagesTD Asservissement Série1Sarra HarroumPas encore d'évaluation
- Cours D'analyse NumériqueDocument79 pagesCours D'analyse Numériquemadjidlethug0Pas encore d'évaluation
- Chapitre 2-Partie2 (Représentation Des Systèmes)Document8 pagesChapitre 2-Partie2 (Représentation Des Systèmes)Mayas Ait MammarPas encore d'évaluation
- TL Cours Regulation Et Asservissement 3Licence GM 2022Document7 pagesTL Cours Regulation Et Asservissement 3Licence GM 2022Fairouz BouchahdaPas encore d'évaluation
- Cours Mécanique Quantique L2 Chap 4 NewDocument12 pagesCours Mécanique Quantique L2 Chap 4 NewFabrice ArriaPas encore d'évaluation
- Équations Des Systèmes LinéairesDocument5 pagesÉquations Des Systèmes Linéairesmadou gana IbrahimPas encore d'évaluation
- cours equations-differentielles-cours-1-2IMPDocument4 pagescours equations-differentielles-cours-1-2IMPoummin8Pas encore d'évaluation
- Cour Complet Oscillations Forcées 1DDLDocument5 pagesCour Complet Oscillations Forcées 1DDLAnya Hernafi100% (2)
- Chapitre 3Document6 pagesChapitre 3Boù ChràPas encore d'évaluation
- Chapitre III - Méthodes Itératives de Résolution de Systèmes LinéairesDocument3 pagesChapitre III - Méthodes Itératives de Résolution de Systèmes LinéairesMounaim MatiniPas encore d'évaluation
- Chapitre IIDocument4 pagesChapitre IIdihia didaPas encore d'évaluation
- Chapitre02 Cours Regulation Et Asservissement 3licence 2021Document7 pagesChapitre02 Cours Regulation Et Asservissement 3licence 2021mohamd techPas encore d'évaluation
- Chapitre 4Document41 pagesChapitre 4Zakaria èl fechtaliPas encore d'évaluation
- Sujet D CMDDocument29 pagesSujet D CMDgasmi chaimaPas encore d'évaluation
- Chapitre 1 RegDocument12 pagesChapitre 1 Regcheikh tidiane diopPas encore d'évaluation
- 5 Réponse TemporelleDocument21 pages5 Réponse TemporelleSamy AmieziPas encore d'évaluation
- Projet Mef 1d p2Document15 pagesProjet Mef 1d p2ra biaPas encore d'évaluation
- Chap - 2 - Oscillations Amorties - Partie 1Document10 pagesChap - 2 - Oscillations Amorties - Partie 1Farid NajibiPas encore d'évaluation
- Chap 2Document19 pagesChap 2anis benabbasPas encore d'évaluation
- Chapitre 2-Partie1-Transformée de Laplace Et Représentation Des SystèmesDocument7 pagesChapitre 2-Partie1-Transformée de Laplace Et Représentation Des SystèmesMayas Ait MammarPas encore d'évaluation
- Correction Problème2-1Document3 pagesCorrection Problème2-1Jaber SlimaniPas encore d'évaluation
- Partie Systemes Du Second Ordre V PartageeDocument7 pagesPartie Systemes Du Second Ordre V Partagee-the queen-Pas encore d'évaluation
- Optimisation Sans ContraintesDocument7 pagesOptimisation Sans ContraintesWarPas encore d'évaluation
- Chapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesDocument5 pagesChapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesSalim BouaziziPas encore d'évaluation
- Analyse Symbolique Des SLCIDocument3 pagesAnalyse Symbolique Des SLCISalma MnasriPas encore d'évaluation
- Chapitre 4Document9 pagesChapitre 4Hamza El AzmaniPas encore d'évaluation
- Support Filtres Numériques 2024Document34 pagesSupport Filtres Numériques 2024mehdibenkalia5Pas encore d'évaluation
- Chap 1Document16 pagesChap 1Raouia SayahPas encore d'évaluation
- Expose Algebre 5Document11 pagesExpose Algebre 5Harp SilvanoPas encore d'évaluation
- TD N4_Laplace_2022Document1 pageTD N4_Laplace_2022kamelia.helaliPas encore d'évaluation
- Chapitre 3 DLDocument3 pagesChapitre 3 DLhayfa kazouzPas encore d'évaluation
- Cours de Statistiques AppliquéeDocument19 pagesCours de Statistiques AppliquéeAli DjebrouniPas encore d'évaluation
- Chap 2Document9 pagesChap 2ymarfoq12Pas encore d'évaluation
- Compte Rendu TP de L'automatique Non LineaireDocument30 pagesCompte Rendu TP de L'automatique Non LineaireTALLI KHADIJAPas encore d'évaluation
- Chapitre 2 Tech Math Model Sys LineairesDocument8 pagesChapitre 2 Tech Math Model Sys LineairesGermaine EkoumkangPas encore d'évaluation
- Chapitre II Automatique 1Document13 pagesChapitre II Automatique 1ambusiness052021Pas encore d'évaluation
- TP2-SA - TahiDocument11 pagesTP2-SA - Tahibou.ekhla1985Pas encore d'évaluation
- La Marche Aléatoire TIPE T PDFDocument5 pagesLa Marche Aléatoire TIPE T PDFYoussef El FahimePas encore d'évaluation
- Cours Mécanique Quantique L2 Chap 1 NewDocument22 pagesCours Mécanique Quantique L2 Chap 1 NewFabrice ArriaPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Chapitre 1 Zero Dune Equation Partie 3Document4 pagesChapitre 1 Zero Dune Equation Partie 3Mohamed El-amine BendjoudaPas encore d'évaluation
- Composants Dune Machine FrigorifiqueDocument27 pagesComposants Dune Machine FrigorifiqueMohamed El-amine BendjoudaPas encore d'évaluation
- Rappels de ThermodynamiqueDocument3 pagesRappels de ThermodynamiqueMohamed El-amine BendjoudaPas encore d'évaluation
- Pompes À ChaleurDocument15 pagesPompes À ChaleurMohamed El-amine BendjoudaPas encore d'évaluation
- Chapitre 1 Zero Dune Equation Partie 2Document5 pagesChapitre 1 Zero Dune Equation Partie 2Mohamed El-amine BendjoudaPas encore d'évaluation
- 2 Corrigé Fiche TD 2 Méthodes NumériquesDocument3 pages2 Corrigé Fiche TD 2 Méthodes NumériquesMohamed El-amine BendjoudaPas encore d'évaluation
- Introduction Méthodes NumériquesDocument4 pagesIntroduction Méthodes NumériquesMohamed El-amine BendjoudaPas encore d'évaluation
- Résumé SDMDocument11 pagesRésumé SDMMohamed El-amine BendjoudaPas encore d'évaluation
- Chapitre II Les VerresDocument14 pagesChapitre II Les VerresMohamed El-amine BendjoudaPas encore d'évaluation
- AilettesDocument8 pagesAilettesMohamed El-amine BendjoudaPas encore d'évaluation
- Exercices - Corriges - Series - Entieres-3-9 mdf-1-6Document6 pagesExercices - Corriges - Series - Entieres-3-9 mdf-1-6Mohamed El-amine BendjoudaPas encore d'évaluation
- Fiche td4 Correction 5Document12 pagesFiche td4 Correction 5Mohamed El-amine BendjoudaPas encore d'évaluation
- Chapitre I PartieiDocument5 pagesChapitre I PartieiMohamed El-amine BendjoudaPas encore d'évaluation
- Conductivite ThermiqueDocument6 pagesConductivite ThermiqueMohamed El-amine BendjoudaPas encore d'évaluation
- chapitreIII CompositesDocument18 pageschapitreIII CompositesMohamed El-amine BendjoudaPas encore d'évaluation
- Recmn NBDocument107 pagesRecmn NBMohamed El-amine BendjoudaPas encore d'évaluation
- Chapitre 2Document14 pagesChapitre 2Mohamed El-amine BendjoudaPas encore d'évaluation
- Création Dun CVDocument2 pagesCréation Dun CVMohamed El-amine BendjoudaPas encore d'évaluation
- Les Éléments de La CommunicationDocument9 pagesLes Éléments de La CommunicationMohamed El-amine BendjoudaPas encore d'évaluation
- Chapitre 1Document34 pagesChapitre 1Mohamed El-amine BendjoudaPas encore d'évaluation
- FTD1MATHS4Document1 pageFTD1MATHS4Mohamed El-amine BendjoudaPas encore d'évaluation
- TD1 +correction Math2-2022Document4 pagesTD1 +correction Math2-2022Mohamed El-amine Bendjouda100% (2)
- Exposé de FrançaisDocument3 pagesExposé de FrançaisMohamed El-amine BendjoudaPas encore d'évaluation
- Corrige Ftd03p1Document3 pagesCorrige Ftd03p1Mohamed El-amine BendjoudaPas encore d'évaluation
- Corrige Ftd2maths4Document2 pagesCorrige Ftd2maths4Mohamed El-amine BendjoudaPas encore d'évaluation
- Emploi Du Temps 1ere ST Semetre 2Document2 pagesEmploi Du Temps 1ere ST Semetre 2Mohamed El-amine BendjoudaPas encore d'évaluation
- TP N° 002 ThermodynamiqueDocument3 pagesTP N° 002 ThermodynamiqueMohamed El-amine BendjoudaPas encore d'évaluation
- TP Physique n1 Les Mesures ElectriquesDocument18 pagesTP Physique n1 Les Mesures ElectriquesMohamed El-amine BendjoudaPas encore d'évaluation
- Décrire Un LieuDocument19 pagesDécrire Un Lieusimoibari77Pas encore d'évaluation
- Rapport de Stage. ESEDA. Amélie Vernay. 2020Document24 pagesRapport de Stage. ESEDA. Amélie Vernay. 2020ismail dang babaPas encore d'évaluation
- Exposé de MaintenanceDocument19 pagesExposé de MaintenanceDahlia ChamkoPas encore d'évaluation
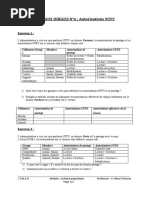
- TD6 - Autorisations NTFS - 2020Document2 pagesTD6 - Autorisations NTFS - 2020Nadiaa KodadPas encore d'évaluation
- TP N1 MenrnDocument3 pagesTP N1 Menrnbahri ahmedPas encore d'évaluation
- Maths 1èrecDocument2 pagesMaths 1èrecYanoussa TEBAYAPas encore d'évaluation
- Paglisan - Score and PartsDocument32 pagesPaglisan - Score and PartsPj Aguilar0% (1)
- MATHS - 2nde C - CALCULS SUR LES NOMBRES RATIONNELS ET SUR LES PUISSANCESDocument2 pagesMATHS - 2nde C - CALCULS SUR LES NOMBRES RATIONNELS ET SUR LES PUISSANCESduvalchamberlainPas encore d'évaluation
- Chapitre 6 (1) Tres InteDocument40 pagesChapitre 6 (1) Tres Intediarradrissa035Pas encore d'évaluation
- Support Du Cours - IUA 2023Document22 pagesSupport Du Cours - IUA 2023kabiohinaPas encore d'évaluation
- NL 16 Accumulateur HydropneumatiqueDocument2 pagesNL 16 Accumulateur Hydropneumatiquea.ghani BaRaCuDaPas encore d'évaluation
- Intro Cours1.1 MSEDocument18 pagesIntro Cours1.1 MSENadhir BndPas encore d'évaluation
- Cahier Du Groupe 3Document6 pagesCahier Du Groupe 3steve tetchoupPas encore d'évaluation
- Partie 4: La MercatiqueDocument4 pagesPartie 4: La Mercatiqueyassine NaserPas encore d'évaluation
- 2016 FR Manuel Dutilisation Et Dentretien WingammDocument30 pages2016 FR Manuel Dutilisation Et Dentretien Wingammdavid.pironPas encore d'évaluation
- Progresso RegelungDocument52 pagesProgresso RegelungdikaPas encore d'évaluation
- TP Installation OxoDocument4 pagesTP Installation OxowwwoldcomPas encore d'évaluation
- Chap1 DLXDocument10 pagesChap1 DLXmed100% (1)
- Cours MMC-MLH-2018-19 PDFDocument90 pagesCours MMC-MLH-2018-19 PDFOuerdi Salma100% (1)
- Fiche Pédagogique - Comment Inspirer Confiance - L'Autorité Par La ConfianceDocument6 pagesFiche Pédagogique - Comment Inspirer Confiance - L'Autorité Par La ConfianceManon TeppazPas encore d'évaluation
- Série N1Document2 pagesSérie N1اسماء داوودPas encore d'évaluation
- Questions Chapitre 01Document4 pagesQuestions Chapitre 01Abdeldjalil djalil100% (1)
- Et L' Homme Créa La Vie Joel de RosnayDocument304 pagesEt L' Homme Créa La Vie Joel de RosnayCaroline BaillezPas encore d'évaluation
- Thyristor GtoDocument3 pagesThyristor GtoYassine El BouazzaouiPas encore d'évaluation
- ISI - Cours 4 - Version ÉtudiantDocument15 pagesISI - Cours 4 - Version Étudiantprobe.lukokiPas encore d'évaluation
- Exercices ImparfaitDocument15 pagesExercices ImparfaitBrahim OmariPas encore d'évaluation
- Exercice 2 Poulies Courroie - Friction Entre Rouleaux PDFDocument2 pagesExercice 2 Poulies Courroie - Friction Entre Rouleaux PDFBen Mah77% (13)
- Cour MoulageDocument15 pagesCour Moulageayoub binnejPas encore d'évaluation
- Bordereau Villa ChattiDocument20 pagesBordereau Villa Chattiarch.ali.laminePas encore d'évaluation
- Introduction-au-systeme-automatise-de-tri-de-piecesDocument10 pagesIntroduction-au-systeme-automatise-de-tri-de-piecesHicham JamaouiPas encore d'évaluation