PROCESS CONTROL TEACHING ON LABORATORY
PLANT SUPPORTED BY INTELLIGENT
TUTORING SYSTEM
Nenad Bolf, Juraj Bozicevic, Slavomir Stankov*
University of Zagreb, Faculty of Chemical Engineering and Technology,
Department of Measurement and Process Control
Savska c.16/5a, 10 000 Zagreb, Croatia, fax: + 385 1 4843 556, bolf@fkit.hr, jbozic@fkit.hr
*University of Split, Faculty of Natural Sciences, Mathematics and Education
Nikole Tesle 12, 21 000 Split, Croatia, fax: +385 21 3854 31, stankov@pmfst.hr
Keywords: process control, chemical engineering,
laboratory training & teaching, intelligent tutoring system
Abstract
Conception, design and application of laboratory plant for
training of students of chemical engineering in automatic
control are presented.
Training programme is composed on such a way that all
control methods are considered from classical to modern
based on artificial intelligence conception. Finally,
original intelligent tutoring system is applied and distance
learning is introduced.
1. Introduction
Over the past three decades control scientist and
educators presented various learning scenarios using
laboratory and pilot plants as efficient support in training
process modeling and control (Colwell et. al, 2002). We
designed and built our very first laboratory plant in the
70’s. Since then the plant has been continuously
redesigned and teaching control methods made better
equally from the methodical and pedagogical viewpoint.
New knowledge as well as hardware, measuring and
control devices have been introduced and finally our
laboratory exercises have been gradually turned in a
versatile training ground for development of system
thinking and integration of theoretical and experimental
work (Bozicevic, 1984, 1990).
For example, in the 80’s we introduced teaching and
training in linguistic modeling and fuzzy process control.
In the 90’s, originally arranged educational laboratory
plant is considered to be the basis for more effective
training of the students of chemical engineering in
advanced process control using Honeywell UMC 800
controller. Then, laboratory research has been broadening
with application of neural network for modeling and
process control (Blazina & Bolf, 1997; Bolf et al. 1990).
Genetic algorithms have been applied in tuning
controller’s parameters (Grundler & Bozicevic, 1997)
while knowledge based control method is still in
development.
In parallel since late 80’s we have studied and developed
original intelligent tutoring system, TEx-Sys. Now we are
refining the intelligent hypermedial authoring shell
(Stankov & Bozicevic, 1997), which will finally be basis
of our advanced educational tool for distance laboratory
education (Lab-TEx-Sys).
TEx-Sys is structured as system model, which allows
building of a universal educational tool for teaching
control methods in natural, social and technical system.
This paper presents a part of the research as well as the
experiences gained in work with students.
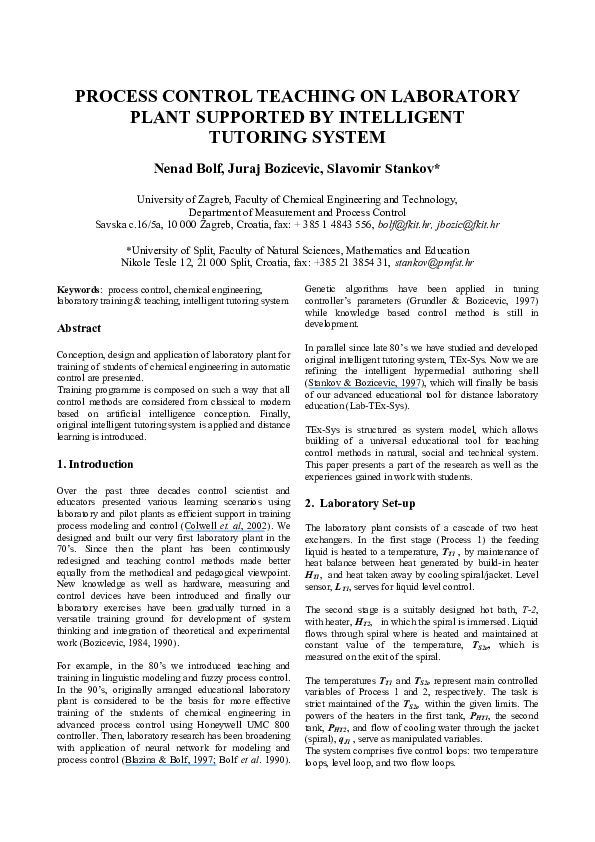
2. Laboratory Set-up
The laboratory plant consists of a cascade of two heat
exchangers. In the first stage (Process 1) the feeding
liquid is heated to a temperature, TT1 , by maintenance of
heat balance between heat generated by build-in heater
HT1, and heat taken away by cooling spiral/jacket. Level
sensor, LT1, serves for liquid level control.
The second stage is a suitably designed hot bath, T-2,
with heater, HT2, in which the spiral is immersed. Liquid
flows through spiral where is heated and maintained at
constant value of the temperature, TS2o, which is
measured on the exit of the spiral.
The temperatures TT1 and TS2o represent main controlled
variables of Process 1 and 2, respectively. The task is
strict maintained of the TS2o within the given limits. The
powers of the heaters in the first tank, PHT1, the second
tank, PHT2, and flow of cooling water through the jacket
(spiral), qJ1 , serve as manipulated variables.
The system comprises five control loops: two temperature
loops, level loop, and two flow loops.
�The variations in the flow of liquid caused by variable
pressure in next process stage, p(t), is considered as a
main source of disturbance. Other sources of disturbances
are flow and temperature variations in the feeding liquid
stream and variations in ambient temperature.
Figure 1: The two-stage heat exchange process in
laboratory teaching plant.
3.3 Traditional process control
The exercises cover well known lessons in classical
control theory, which generations of chemical
engineering students have been taught, continuous and
on–off control are studied in details. Then, we have
shifted emphasis, on digital control theory and in early
eighties first computer control was applied.
Two feedback control loops shown in Figure 2 are the
principal subjects of the study and exercise during first
learning unit. They are characterized by different process
dynamics and therefore they are very suitable in training
of the controller tuning. There are many various tasks
within this learning unit, but the design of the linear
control system and its stability are treated especially in
detail.
The investigation of complex behaviour of the whole
process is considered too with the aim to maintain the
overall process goal. The conception of hierarchical
control is introduced and applied, but the detail study is a
part of second learning unit which contains exercises in
digital computer control.
3. Conception of the training programme
3.1. Introduction
The aim of the laboratory plant encompassed:
a) mathematical modeling and identification;
b) Traditional methods of process control
(feedback, cascade, split, feedforward control);
c) computer-based measurement and control;
d) fuzzy and neural network-based process control;
e) Computer aided training using TEx-Sys.
The flexible organization of the learning units allows
flexible teaching organization, depending on the purpose
and goal of the presented teaching programme.
3.2 Mathematical modeling
The dynamical mathematical model of the process is
presented by input-output structure diagram (Appendix),
the relations between the input and the output variable as
well as the influences of the parameter is studied in the
details. Then the results of computer simulation
(MATLAB), with results of experimental research are
being compared and studied. The steady-state process
model serves for the definition of set points and
specification of control tasks. A special lesson is
dedicated to comparative evaluation of transfer functions,
state space and real time model of the plant. Aside of the
lessons on modeling and simulation and experimental
verification of the model, also selected identification tasks
are considered.
Figure 2: Traditional process control scheme.
3.4 Fuzzy process control
In the eighties training in the conventional automatic
control has been gradually enriched with fuzzy control
theory (Bozicevic, 1987). At the beginning the aim was to
familiarize students with the basic concept and
procedures of the newly developed linguistic modeling
and to show how the fuzzy set theory enables the usage of
vagueness and uncertainly, nonprecise, ill-defined
concepts and operation with these in mathematically strict
sense. The synthesis and the analysis of fuzzy feedback
control were introduced and finally fuzzy feedforward
and composite control (Stipanicev & Bozicevic, 1986).
Student selected within working group play the role of
the operator, he/she performs the operator's tasks and
become experienced enough, so that his control actions
may serve for the definition of fuzzy control algorithm.
Then the students study and test three control strategies:
�1) the operator uses the error as information and
adjusts the power below or above certain value;
2) the operator uses the error as information and
corrects the temperature by changing the electric
power;
3) the operator uses the error and the rate of change
of error to effect a change of electric power.
For each strategy students have to develop the rules, and
than set up the algorithm. The performance of fuzzy
process control is compared with the performance of an
ordinary PI controller and PID controller tuned during the
first learning unit, naturally only as a rough illustration of
relative performance.
The fuzzy feedforward and fuzzy composite control are
also taught. The control procedures are developed by
means of the fuzzy relational model of process. The
disturbances in pressure, pL(t), are taken as a disturbance
which gives ground for feedforward control actions. The
following particular exercises are considered:
a)
modeling of the first process and evaluation of a
fuzzy model suitable for feedforward control
application;
b) synthesis of fuzzy feedforward as well as fuzzy
feedforward – feedback controller;
c) development of the software and the analysis of the
performance compared with the classical feedback
and composite control.
3.5 Neural network-based control
Use of the neural networks offers effective means of
handling complex, nonlinear and uncertain processes.
Basically, students are thought how to design and apply
neural network control through following task (Bolf et
al., 1997):
a) Direct network control; the neural network is trained
as a controller and the controller output is determined
directly.
b) Inverse network control; training a neural network as
an “inverse” model of a process, and the process
inputs necessary to produce desired process outputs
(setpoints) are being predicted.
c) Coordinated control supported by neural-network
based model of the process.
In the Figure 3 an approach to neural network-based
control task, coordinated model-based control is shown.
Figure 3: Coordinated control supported by
neural-network based model
3.6. Application of Honeywell UMC-800 Controller
In the beginning PC was used for a process control and
the students had opportunity to learn on the data
acquisition, and development of necessary software.
Recently, Honeywell universal multiloop controller
(UMC800) is installed. It enables teaching student in
industry standards in control. UMC-800 is also
considered to serve as basis for more effective training of
the students of chemical engineering in advanced process
control.
4. Intelligent hypermedial authoring shell as
a tool for process control teaching
System model of education shown (Bozicevic et al.,
1990) in Figure 4 is use as basis for development of
tutoring system and its gradual transformation in
intelligent hypermedial authoring shell named TEx-Sys. It
is adjusted to both teachers and students. The control
function in TEx-Sys is based on: (i) measurement and
diagnostics of student knowledge, (ii) determination
difference between actual student knowledge and the one
described in the referent model (iii) evaluation of student
knowledge with recommendations for future work.
Recently, we have designed Lab-TEx-Sys which permits
integration of our laboratory plant measuring and control
units with Lab-TEx-Sys and is start-up point for distance
learning.
4.1. Background
Student knowledge level or achieved level of domain
knowledge serves as manageable variable for the actual
instruction unit of domain knowledge. The referent value
is defined through: (1) the goals and tasks of the subject
matter, which need to be understood; and (2) the “good”
student model based on evaluation criteria which
�implicate the cognition of specified student knowledge
level.
The computer tutor, as a replacement for a “human” tutor,
acts as a feedback in the instruction system, which has the
tasks of: (1) monitoring, i.e. measuring and diagnosing
the student knowledge, (2) determining differences
between actual student knowledge and the referent model,
(3) managing activities’ states, and (4) the new
knowledge transfer or remediation.
recommendation for additional learning about the domain
knowledge, if the system concludes that he/she isn’t
acquainted with them based on evaluating his/her answers
(for students).
The formalism for knowledge presentation in TEx-Sys is
based on semantic networks with frame and production
rules. The basic components of TEx-Sys semantic
networks are nodes and links. Nodes are used for
presentation of domain knowledge objects, while links
show relations among objects. Beside nodes and links, the
system supports properties and frames (attributes and
respective values), along with property inheritance. The
system heavily relies on modern supporting technologies,
such as multimedia, with the following structure
attributes: picture, animation, slides, hypertextual
description and URL address are also available.
Figure 4: Model of teaching system which serves as
the basis of TEx-Sys
TEx-Sys is structured into the following modules, as is
shown in Figure 5:
•
•
Login: legalization of work on the system;
T-Expert (Developing module) building the base of
freely chosen domain knowledge (for teachers, and in
particular cases for students, too);
• Learning and Teaching (Learning &Teaching
module) of freely chosen domain knowledge (for
students);
• Testing (Testing module) evaluation of a student's
knowledge within a teaching scenario, according to
Piaget's theory of "guided free play" (Sugerman,
1978) and combinations of scenarios of teaching by
"articulated experts" and "dialogues of
divided initiatives"(Carbonel, 1970);
• Evaluation (Evaluation module) access to the
achieved results of learning and teaching (for
teachers and for students too);
• Quiz (Quiz module) is implementation of the test, in
which a student gets set of questions with attached
answers. The student solves the test by marking answers
he/she assumes to be correct. After the student solves the
test, he/she gets a mark (according to his answers) and a
Figure 5: The structure of Lab-TEx-Sys
Using program module Developing the knowledge base
<Two-stage heat exchanger> has been developed. It has
the following structure: 176 nodes, 181 links, 43 structure
attributes. In their work students use Learning and
Teaching module designed for acquiring necessary
knowledge, whereas module Quiz is used for knowledge
testing.
4.2. Learning and teaching with TEx-Sys using
knowledge base
The knowledge base is structured to allow use of
semantic kinds, which TEx-Sys has, for knowledge
presentation. In their preparation for work on TEx-Sys,
students have to previously learn: (1) knowledge
formalization with semantic networks; (2) semantic kinds
in TEx-Sys; (3) work with program modules of TEx-Sys.
In the learning and teaching process students go through
the following stages:
-
Understanding of the domain knowledge
decomposition;
�-
Login to the TEx-Sys;
Learning and teaching with the knowledge base;
Knowledge testing and evaluation with
recommendations for future work;
The knowledge base <Two-Stage Heat Exchanger>
is used for teaching process control and gathering
experience with experimental laboratory plant.
References
[1]
Baughman D.R., Liu Y.A. (1995). Neural Networks in
Bioprocessing and Chemical Engineering, San Diego:
Academic Press.
[2]
Blazina, A., Bolf, N. (1997). Neural Network-Based
Feedforward Control of Two-Stage Heat Exchange
Process, IEEE International Conference On Systems,
Man, And Cybernetics, Computational Cybernetics and
Simulation, Orlando, USA, SMC'97 Conference
Proceedings, Vol.1, pp. 25-29.
[3]
Bolf, N., Blazina, A., Bozicevic J., Caharija, A. (1999).
Two-Stage Heat Exchange Process; Neural NetworkBased Control, 2nd European Congress of Chemical
Engineering, No.69, Volume 13-1999, pp. 251-258.
[4]
Bozicevic, J. (1984). Laboratory Exercises in
Measurement for Students of Chemical Engineering –
Two Decades of Experience and Future Development,
Advances in Measurement and Instrumentation
Education, IMEKO, Graz, pp. 197-204
[5]
Bozicevic, J. (1987). Laboratory Plant for Comparative
Study of Deterministic and Fuzzy Process Control, Int.
report, Faculty of Technology, University of Zagreb
[6]
Bozicevic J., Stipanicev D. (1988). Teaching and Training
the Fuzzy Process Control, Proceedings of the ISA 88,
Houston, pp. 1577-1582.
[7]
Bozicevic J. et al. (1990). Advanced Laboratory Training
in Process Modeling and Control, Proceedings of Ninth
IASTED
International
Symposium,
Modeling,
Identification and Control, ACTA Press, Anaheim, pp.
330-323.
[8]
Carbonell, J. R. (1970). AI in CAI: An ArtificialIntelligence Approach to Computer-Assisted Instruction,
IEEE Trans. Man-Machine Systems, MMS-11(4), pp.
190-202.
[9]
Colwell C., Scanlon E., Cooper M. (2002). Using remote
laboratories to extend access to science and engineering,
Computers & Education, 38, pp. 65-76.
5. Conclusion
An original program of laboratory exercise for student of
chemical engineering is presented as an example of
training approach. Students solve the basic process
control tasks, develop and analyze process model and
than apply various control methods, study stability and
finally have a test of the acquired knowledge. During the
laboratory work the students are expected to master each
learning unit in the following steps:
introductory discussion on necessary knowledge for
training and understanding and
scheduling
experimental tasks;
deriving of the functional tasks, study of process,
measurements, control structure, etc.
- experimentation,
- analysis and discussion of the results,
- reviewing of the experiments, reporting.
Intelligent tutoring supports training in laboratory. The
knowledge base build in the TEx-Sys system framework
is designed in this purpose. Students have possibility to
test their knowledge much more concisely than in the
traditional way.
The students that had used TEx-Sys were very
enthusiastic, especially with:
- the possibility to take a lecture at any given time and
place,
- the benefit of learning through multimedia
approaches
- quiz for testing their knowledge, which they accept
as very objective evaluation.
The system provides all students in the chemical
engineering course with exposure to an industrial-like
control problem. It enables final year students to gather
experience through two-semester projects. The
experiences from the application of this system open a
number of ways for future work.
Acknowledgment
This paper is a part of the project TP-01/12507
“Distributed Laboratory for Distance Teaching“
supported by Ministry of Science and Technology of the
Republic of Croatia.
The authors would like to thank Dr. Alojz Caharija, Mr.
Goran Galinec and Mr. Denis S. Vedrina who actively
contributed to the work through advice, counsel and
criticisms.
[10] Mamdani, E. H., Assilian S. (1975). An Experiment in
Linguistic Synthesis with a Fuzzy Logic Controller,
Intern. J. Man-Machine Studies, 7, pp. 1-13.
[11] Perkins, J. (2002). Education in process systems
engineering: past, present and future, Computers &
Chemical Engineering 26, pp. 283-293.
[12] Stankov, S. (1997). Isomorphic Model of the System as
the Basis of Teaching Control Principles in the Intelligent
Tutoring System, PhD. Thesis, University of Split.
[13] Stankov S. & J. Bozicevic (1997). TEx-Sys - An
Authoring Tool for an Intelligent Tutoring System with
Hypermedia, 1997 IEEE International Conference on
Systems, Man, and Cybernetics, Orlando, Florida, USA,
Proceedings Vol. 3 , pp. 2363-2368.
[14] Stipanicev D. & J. Bozicevic (1986), Fuzzy Feedforward
and Composite Control, Trans.Inst. MC, 8, pp. 67-75
[15] Sugerman R. (1978). 'What's new, teacher?' Ask the
computer, IEEE Spectrum, pp. 44-49.
�Appendix: Structural scheme of the two-stage heat exchanger with emphasize on interactions
PH1
TS
qT1
TT1i
qS1
TS1i
dTH1
1
U ⋅A
=
PH1 − H1 H1 ⋅(TH1 −TT1 )
dt mH1 ⋅ cpH1
mH1 ⋅ cpH1
TH1
dTT 1 qT 1
U ⋅A
=
⋅ ( TT 1i − TT 1 ) + H 1 H 1 ⋅ ( TH 1 − TT 1 ) −
dt VT 1
VT 1 ⋅ ρ ⋅ c p
−
TT1
U S 1 ⋅ AS 1
U ⋅A
⋅ ( TT 1 − TS 1 ) − T 1 T 1 ⋅ ( TT 1 − Ts )
VT 1 ⋅ ρ ⋅ c p
VT 1 ⋅ ρ ⋅ c p
U ⋅A
dTS 1 q S 1
=
⋅ ( Ts 1i − Ts 1o ) + S 1 S 1 ⋅ ( TT 1 − TS 1 )
VS 1 ⋅ ρ ⋅ c p
dt
VS 1
TS 1 = TT 1 −
Ts 1o − Ts 1i
T −T
ln T 1 S 1i
TT 1 − TS 1o
TS 1
dTP qT 2i
U ⋅A
=
⋅ ( TT 1 − TS 2i ) − P P ⋅( TP − TS )
dt
VP
VP ⋅ ρ ⋅ cP
TP = TS −
TT 1 − TS 2 i
TS − T S 2 i
TS − TT 1
HEAT EXCHANGER 1
TS2i
ln
CONNECTION PIPE
TS1o
PH2
TP
dTH 2
PH 2
U ⋅A
=
− H 2 H 2 ⋅ ( TH 2 − TT 2 )
dt
mH 2 ⋅ c pH 2 mH 2 ⋅ c pH 2
TH2
dTT2 UH2 ⋅ AH2
U ⋅A
U ⋅A
=
⋅(TH2 −TT2 )− T2 T2 ⋅(TT2 −TS )− S2 S2 ⋅(Tk2 −Tz2 )
dt VT2 ⋅ ρ⋅ cp
VT2 ⋅ ρ⋅cp
VT2 ⋅ ρ⋅cp
p(t)
qT 2 = f [ p(t)]
qT2
d TS 2 qT 2
U ⋅A
=
⋅ ( TS 2 i − TS 2 o ) + S 2 S 2 ⋅ ( TT 2 − TT 2 )
dt
VS 2
VS 2 ⋅ ρ ⋅ c p
TS 2 = TT 2 −
TT2
TS 2
TS 2o − TS 2i
TT 2 − TS 2 i
TT 2 − TS 2 o
TS2o
ln
HEAT EXCHANGER 2
�
 slavomir stankov
slavomir stankov