
Fundamentals of Excitation Systems: Unitrol 6000 Service and Commissioning Training
Uploaded by
ASHXQ39WCopyright:
Available Formats
Fundamentals of Excitation Systems: Unitrol 6000 Service and Commissioning Training
Uploaded by
ASHXQ39WOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Copyright:
Available Formats
Fundamentals of Excitation Systems: Unitrol 6000 Service and Commissioning Training
Uploaded by
ASHXQ39WCopyright:
Available Formats
UNITROL 6000 Service and Commissioning Training
ABB Switzerland AG Learning Center Power Electronics Turgi, Switzerland
Fundamentals of Excitation Systems Chapter 2
2007 ABB Ltd/Chapter 2
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 1 -
21/12/2007
UNITROL 6000 Service and Commissioning Training
2.1 What is an Excitation System
North
Rotor Current
The rotor of a synchronous machine is an electromagnet. The effect of the rotating flux on the stator windings produces an induced voltage.
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 3 -
South
The principle of voltage generation
The production of voltage in the synchronous machine is based on the induction low. This means if the flux changes in the stator winding of the synchronous machine there will be a voltage induced.
L1
L2
Rotor
Stator winding Rotor winding
L3
Stator
The flux is produced by the current supplied from the excitation system to the rotor winding. The change of flux in the stator winding is caused by the movement of the rotor. This induces the voltage in the stator winding as illustrated in the figure below:
2007 ABB Ltd/Chapter 2
21/12/2007
UNITROL 6000 Service and Commissioning Training
2.1 What is an Excitation System
Excitation System
Voltage Regulation
Voltage
Current Control
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 4 -
Power Supply
Rotor Current Production
In any excitation system, several components can be identified. Depending on the age and type of the system, the equipment may vary greatly, however the basic components can still be classified. Rotor Current Production The rotor of the machine must be supplied with a current. For example this could be by: A large power electronic converter (direct), or a small current supply feeding an excitation machine, which in turn produces the large rotor current. (indirect system). Power Supply The excitation system needs a power supply in order to produce a current. There are many different configurations. Shunt Supply The supply is taken from the machine terminals. Line Supply The supply is taken from an auxiliary supply. Permanent Magnet Generator A small permanent magnet generator is mounted on the same shaft as the main machine. Current Control No matter how the current is produced, there must be some method of controlling how much current is produced. In the case of a state of the art control system the rotor current is controlled by semi conductive rectifiers. Voltage Regulation Voltage regulation is done in the control system by the Automatic Voltage Regulator (AVR). The voltage regulator various the rotor current automatically in order to maintain the terminal voltage of the synchronous machine even in case of load change.
2007 ABB Ltd/Chapter 2 21/12/2007 4
UNITROL 6000 Service and Commissioning Training
2.1 What is an Excitation System
CONTROL ROOM STEP UP TRANSFORMER LV SWITCHGEAR
HV SYSTEM
HV- BREAKER
AC & DC AUXILIARY SYSTEMS
AUX. TRANSF. GOVERNOR 1 GENERATOR BREAKER
PROTECTION
CONTROL SYSTEMS
PTs & CTs SYNCHRONIZING
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 5 -
TURBINE
SYNCHRONOUS GENERATOR
EXCITATION SYSTEM
STAR POINT CUBICLE
EXCITATION TRANSFORMER
The Excitation System in the Power Plant
The picture above shows the connections to the excitation system in a power plant. The excitation system is usually located close to the synchronous machine. The main power supply for the production of the rotor current is taken from the generator terminals and fed via the excitation transformer to the excitation system. The output of the excitation system supplies the direct current via slip rings to the rotor winding. The terminal voltage and machine current is measured by means of Potential transformers PTs and current transformer CTs. These signals are used to control the generator voltage and reactive power. The excitation system is operated by the operators in the control room via the control interface as illustrated .
2007 ABB Ltd/Chapter 2
21/12/2007
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine
Controlled Object
I f
Disturbance
Ug
Network
Synchronous Machine Excitation System
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 7 -
The closed loop regulating circuit
The closed loop regulating circuit of the synchronous machine can be represented for the electrical variables as shown in the figure. The output voltage UG of the synchronous machine is picked up by the voltage regulator of the excitation system and compared with the setpoint. The output of the excitation system in the form of the excitation current If is the input to the synchronous machine, which closes the regulating circuit. For a synchronous machine coupled to an electrical network, the network simply acts as a disturbance value. Disturbances in the network such as the shutting down of large consumers or short circuits influence the generator voltage in an undesirable way. It is the function of the excitation system to balance out these undesirable changes immediately and to operate the machine stably on the network.
2007 ABB Ltd/Chapter 2
21/12/2007
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine
The solid pole synchronous machine
Rotor Stator
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 8 -
High speed application for speed range > 1500 rpm
The synchronous machine
The synchronous machine essentially consists of two parts: the rotating part, the rotor, and the static part, the stator. In order to cover the wide range of rotational speeds of possible turbines, two different types of synchronous machine are available. The solid pole machine (Turbogenerators) In thermal turbines, rotational speeds >1500 rpm are usually required. In this case, so-called solid pole machines, as shown in the diagram, are used. The full pole machine is also referred to as a turbogenerator. The salient pole machine In river-driven power stations, Kaplan turbines are usually used which have low rotational speeds of < 1500 rpm . In these cases, so-called salient pole machines are used, as shown in the following diagram. In contrast to the full pole machine, in these machines the diameter of the rotor is very large and the length short. The full pole and salient pole machines basically function in the same way. They only differ, in some cases, in their behaviour under load.
2007 ABB Ltd/Chapter 2
21/12/2007
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine
The salient pole synchronous machine
Stator
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 9 -
Rotor
Slow speed application for speed range < 1500 rpm
The figure shows a typical salient pole machine with an output of 120 MVA A distinctive feature is the very large diameter of the rotor, which can exceed 20 m in very large machines.
2007 ABB Ltd/Chapter 2
21/12/2007
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine
Synchronous machine triphase representation
IR
Stator
IDR
UR
120
UT If IT IDT Uf
120
Rotor
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 10 -
120
IDS
IS
US
3-phase representation of the synchronous machine
The diagram shows the synchronous machine with the three phases. Each phase is displaced physically by 120 and, viewed in terms of electrical values, essentially consists of two reactances, the main reactance and the secondary reactance formed by the damper winding. Both reactances are associated with ohmic resistances, which are not of importance in considering the excitation system. A further reactance is found in the rotor winding with the associated winding resistance.
2007 ABB Ltd/Chapter 2
21/12/2007
10
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine
d-q axes representation
d
D axis ra Id Ud
Stator
rdD
dD
IdD
rf Uf If
f Q1 IQ1 Q2 IQ2 q
Q axis
rQ1
rQ2
ra Iq
Rotor
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 11 -
Uq
D-Q axis representation of the synchronous machine
The D-Q axis representation is used to explain the behaviour of the synchronous machine. The 3-phase system can be transformed into a singlephase representation by means of a mathematical operation. The mathematical operation will not be discussed here. In order to explain the behaviour of the synchronous machine, the two resulting axes, the quadrature axis (Q-axis) and the direct axis (D-axis), are given different impedances and reactances, together with the associated resistances, which are given the corresponding index q or d. These impedance values can be found in the detailed data sheets provided by the manufacturer of the synchronous machine. The meaning of the individual reactances will not be examined here. Rather, we will carry out a substitution of the different reactances in order to explain the behaviour of the synchronous machine.
2007 ABB Ltd/Chapter 2
21/12/2007
11
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine
The simplified equivalent circuit for the synchronous machine
q-axis
Synchronous Reactance
If
d-axis
Xf
Xa Xm
Xd,q
Uf
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 12 -
Rotor
Stator EP EP
UG
Rotor
Fig. a
Stator
Fig. b Fig. c
The equivalent circuit diagram for the synchronous machine
In order to explain the behaviour of the synchronous machine in stationary operation, we simplify the complex structure of the synchronous machine. Taking into consideration the q-axis and d-axis, one can represent the synchronous machine as bipolar, see Fig.a. The rotor with the field winding is fed from the excitation system. The excitation current generates a magnetic field which induces a voltage in the stator winding through the rotation of the rotor, according to the induction principle. This voltage can be measured at the output terminals of the generator when the machine is in no-load operation. This physical interpretation of the way the synchronous machine functions can be represented as the equivalent circuit diagram Fig. b) with the main reactance Xm and the control reactances Xf and Xa as shown in the diagram. The voltage source Ep stands for the voltage induced in the stator windings which is determined by the excitation current and the rotational speed of the machine. Ep is also referred to as EMF (electromotive force) or air gap voltage . The structure of this equivalent circuit diagram is also used for transformers. In fact, the synchronous machine acts like a transformer with an air gap. The reactances shown in Fig. b) can be further condensed and transferred to the very simple equivalent circuit diagram Fig. c). This equivalent circuit diagram is sufficient to describe the stationary behaviour of the synchronous machine. Essentially, it simply consists of the internal voltage source and an internal resistance which essentially appears in the form of a reactance, the so-called synchronous reactance Xd or Xq. The synchronous reactance has a great influence on the electrical behaviour of the machine. The value in the direct axis Xd and in the quadrature axis Xq are almost equally in solid pole machines. In salient pole machines, is Xd > Xq.
2007 ABB Ltd/Chapter 2 21/12/2007 12
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine Generator no load characteristic
Xd
If ,n
Ug UGn
Saturation
Ep
UG
Generator nominal voltage
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 14 -
No load field current
I fo
Speed n = constant
If
The operating behaviour of the synchronous machine
Generator no load characteristics Starting out from the simple equivalent circuit diagram, the generator terminal voltage in no-load operation is essentially determined by the excitation current If and the rotational speed n. In considering excitation, one can assume that the machine rotates at nominal speed. This means the induced voltage Ep is only determined by the excitation current. The relationship between excitation current and generator voltage can be seen from the graphic. If one starts to slowly increase the excitation current, the generator voltage increases in proportion with the excitation current. An important point here is the excitation current required in order to reach the generator nominal voltage. This current is called the no-load field current Ifo and is one of the important characteristic values of the synchronous machine.
2007 ABB Ltd/Chapter 2
21/12/2007
14
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine Generator short circuit characteristic
Xd
UGn
Ig IG
Generator current at Ifo
If ,n
Ep
UG = 0
Ep = UGn
No load field current
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 15 -
I fo
Speed n = constant
If
For If = Ifo Xd = IGn/IG
Example:
IG at (If = Ifo)
Measurement at If = Ifo: IGn/IG = 2.43 Xd = 2.43 pu
Generator short circuit characteristics
For the short circuit test the machine terminals must be short circuited. Be aware that the machine current can go up the its nominal value. While the machine is running at rated speed the field current will be slowly increased. At the same time the machine current must be read in order to gain the short circuit characteristic of the synchronous machine. The ratio between IG(If =Ifo)/IGn determines the synchronous reactance Xd of the machine, where Ifo is the no load field current and IG the measured machine current at no load field current.
Xd =
IG I Gn
Where:
Xd Sychronous reactance direct axis IG Machine current at no load field current IGn Machine rated current
2007 ABB Ltd/Chapter 2
21/12/2007
15
UNITROL 6000 Service and Commissioning Training
2.2 The Synchronous Machine
Generator on load
Xd
U = IG Xd
IG
U = Xd Ig
Ug
UG = const.
Load
Ep
Ep
p ~I f
IG
Load angle
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 16 -
Fig. a Fig. b
Generator on load
If a load is applied to the machine which has been excited in no-load operation, the output voltage Ug drops, because the load current, via the synchronous reactance, results in a voltage drop U. This voltage drop is considerable at machine nominal current. In order to ensure that the generator voltage is also kept stable under load, the voltage drop must be compensated by increasing the excitation current. This compensation takes place automatically if voltage regulators are used. The generator voltage is thereby kept stable through adjustment of the excitation current. This is one of the fundamental functions of the excitation system In order to find the excitation current required for a specific load point, a vector diagram (Fig. b) can be drawn for the simple equivalent circuit diagram. Here, the generator voltage UG is left constant and the voltage drop U is drawn in. For a purely ohmic load, this voltage drop U is perpendicular to the load current IG and is applied to the generator voltage. The resulting voltage of the two vectors UG and U in turn represent the induced voltage Ep, which is proportional to the excitation current. This means that a relationship has been found between the excitation current and the generator load current. If one imagines the machine current IG to be reduced to 0, then Ep and UG match. The length of the Ep vector is known to be a measure for the excitation current, which for IG = 0 corresponds to the no load field current, which is determine from the no-load characteristic. In this way, the necessary excitation can be determine for any load point. The broken lines show the vector diagram for inductive load. According to this, the excitation must be increased in order to compensate the voltage drop.
2007 ABB Ltd/Chapter 2
21/12/2007
16
UNITROL 6000 Service and Commissioning Training
2.3 Operation of the Synchronous Machine The power chart of the synchronous machine
Active Power
P
1 pu
1 Turbine Power
P(Ep)~If
Generator Operation
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 17 -
-Q
-1
1 xd
under excited
+1
+ Q Reactive power
Motor
over excited
The Power Chart of the synchronous machine
The vector diagram for the synchronous machine was shown with voltage and current vectors. In practice, power vectors tend to be used in order to assess the operating behaviour of the synchronous machine. For this purpose, we can draw the power diagram with the two power axes: the active power axis and the reactive power axis. The nominal apparent power (1 pu) of the synchronous machine thereby appears as a circle. The active or reactive power can thereby assume both positive and negative values. Negative active power means, for example, motor operation. The power vector diagram is obtained from the voltage vector diagram as follows: - All values are expressed in so-called Per Unit (pu) values. For example, the generator nominal voltage is 1 pu, the generator nominal power is 1pu etc. - To obtain the power values from the voltage values, one multiplies the voltage vectors by the value UG/Xd according to Ohms law. This gives us the power vectors. For example, the vector U = IG Xd becomes the power vector S = IG Ug . The power vector S thus corresponds to the apparent power of the synchronous machine. One can proceed analogously with the other voltage vectors. The power vectors can be entered in the so-called power diagram with the active power axis and the reactive power axis as shown in the figure above. If the synchronous reactance is expressed in per units, the 1/Xd point is the starting point for the air gap power P(Ep), which for UG=1pu is still proportional to the field current If. The operating point (1) represented in the above diagram only lies in the active power axis, i.e. only active power is output. If the synchronous machine is coupled to the electrical network and the excitation current is increased, reactive power is output into the network in addition to the active power. In this case, the machine operates within the overexcited range. Another important variable is the so-called load angle. This angle also actually occurs as a mechanical angle between the magnetic rotary field generated by the stator windings and the magnetic field generated by the rotor winding. As soon as the machine takes up active power, this angle increases. If active power is present, this angle is also influenced by the excitation current. If, for example, the machine is de-excited, the load angle becomes greater. The question arises here as to how great this angle may become for the machine to still rotate synchronously with the rotary field of the stator. 2007 ABB Ltd/Chapter 2 21/12/2007 17
UNITROL 6000 Service and Commissioning Training
2.3 Operation of the Synchronous Machine
The torque characteristic of the generator
Stability limit
The torque equation
Md
d2 ~ If2
Md1 ~ If1
Drive torque
M d = E p I G sin =
E p U G Xd
sin
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 19 -
The torque characteristic of the synchronous machine
The diagram shows the curve of the synchronising torque as a function of the load angle. The maximum torque is achieved at a load angle of 90, whereby the excitation current determines the value of the maximum. The greater the excitation current, the greater the magnetic flux and thus the synchronising force Fsyn in the machine. At a particular active power and excitation current, a particular load angle 2 results. If the excitation current is reduced with the active power of the machine remaining the same, the load angle increases to the value 1.
2007 ABB Ltd/Chapter 2
21/12/2007
19
UNITROL 6000 Service and Commissioning Training
2.3 Operation of the Synchronous Machine The safe operating area of the synchronous machine
Stability Limit
Active Power
P
1 pu
Rated Power Drive Limit
safe operating area
~Ifn Sn
Generator Operation
Field Current Limiter
max= 90
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 20 -
-Q
-1
1 xd
under excited
+1
+ Q Reactive power
Motor
over excited
The safe operating area of the synchronous machine
If the machine is operated at the nominal operating point, an excitation current is present which we call the nominal excitation current Ifn. The rotor windings and the power units of the excitation system are designed for this current, because it must be possible to operate permanently at this point. In order to prevent the rotor or the excitation from being overloaded, an excitation current limiter is used which is implemented in the excitation system. The result of this is that the operating range is limited within the overexcited range. In the active power axis, the operating range is limited by the maximum turbine ouput, which usually lies between 80% and 90% of the output of the synchronous machine. Within the underexcited range, the operating range is limited by the machine current or by the stability limit of the synchronous machine. The theoretical stability limit is reached at a load angle of =90. This means that the safe operating range of the synchronous machine is determined by the turbine and the two limiters in the overexcited and underexcited range. Why the stability limit is reached at a load angle of 90 will be explained in greater detail in the following.
2007 ABB Ltd/Chapter 2
21/12/2007
20
UNITROL 6000 Service and Commissioning Training
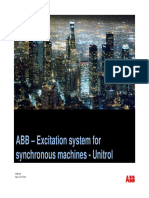
2.6 Transient behaviour of the synchronous machine Generator voltage in case of reactive load rejection
Ug Overvoltage relay
with constant field current with AVR (static excitation system)
Uo IQ x Xd "
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 33 -
t t=0 1 Sec.
Load rejection
By opening of the main circuit breaker of the machine the load will be dropped off immediately. The early invention of the automatic voltage regulator is certainly caused by the consequences of this event. It is also an important quality mark for a voltage regulator how the generator voltage varies with the time after the breaker has opened. The drop of the reactive load current to zero inevitably causes an immediate voltage rise U=Ireactive Xd. If for instance the subtransient reactance Xd=0.2 p.u. the rejection of 0.5 p.u. reactive current gives an instantaneous rise of 10%. If the load on the synchronous machine is changed through connection of an additional load, then the electrical active power changes suddenly, which can not be reduced by any control action. Without AVR the voltage then rises further till the maximum value is reached defined by the synchronous reactance. The time delay corresponds to the no load time constant Tdo. With an AVR this further rise is more or less completely eliminated and the voltage is brought back to the initial value. How quickly this is achieved depends on whether or not the additional time constant of an exciter machine has to be overcome. Without a voltage regulator the over voltage relay of the generator protection would be activated and deexcite the generator.
2007 ABB Ltd/Chapter 2
21/12/2007
33
UNITROL 6000 Service and Commissioning Training
2.6 Transient behaviour of the synchronous machine
Generator voltage in case of long distance short circuit
UG
UO
with voltage regulator
with constant field current
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 34 -
t=0
1 sec
Long distance short circuit
In case of a short circuit in the grid system away from the power plant the voltage will drop immediately. The voltage regulator tries to keep the machine voltage on its setpoint. After a certain time the fault in the grid will be cleared by the line protection and the system voltage will recover. This leads to an overshoot of the machine voltage. The voltage regulator will reduce the voltage to normal again.
2007 ABB Ltd/Chapter 2
21/12/2007
34
UNITROL 6000 Service and Commissioning Training
2.7 Definition of Excitation Systems
Duties of the Excitation System
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 35 -
Maintain the generator terminal voltage Operate the synchronous machine within its operating limits Prevent the synchronous machine from being in asynchronous mode Fast response in case of network disturbances Share reactive power with other synchronous machines connected in parallel Stabilize power oscillations High reliability
Duties of the Excitation System
The diagram shows all the important main duties of the excitation system, as they have been explained in the preceding diagrams.
2007 ABB Ltd/Chapter 2
21/12/2007
35
UNITROL 6000 Service and Commissioning Training
2.7 Definition of Excitation Systems
Glossary and Definitions (IEEE STD. 421.2)
Ifo Ifn Icl Ufo Ufn Ufcl
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 36 -
No load field or excitation current
Required field current to achieve 100% generator terminal voltage at rated speed
Nominal field or excitation current
Required field current to operate the synchronous machine at rated power
Ceiling field current
Maximum field current that excitation system is able to supply from its terminals for a specific time
No load field voltage
Required field voltage to obtain the no load field current considering the field resistance
Nominal field voltage
Required field voltage to obtain the rated field current considering the field resistance
Ceiling field voltage
Required field voltage to obtain the ceiling field current
KPl
Excitation Ceiling factor
Ceiling field voltage divided by no load field voltage Ufcl/Ufo
Load angle
Physical angle between rotor field and stator field
Glossary and Definitions
The diagrams show the most important abbreviations and definitions of physical values in connection with excitation, as defined in the IEEE STD. 421.2 standards.
2007 ABB Ltd/Chapter 2
21/12/2007
36
UNITROL 6000 Service and Commissioning Training
2.7 Definition of Excitation Systems
Glossary and Definitions cont
cos Xd Xq Rs Tv
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 37 -
Phase angle
Electrical angle between machine voltage and machine current
Power factor Ratio of machines active power to apparent power Machine synchronous reactance in direct axe Machine synchronous reactance in quadrature axe System nominal response
The rate of increase of the excitation system output voltage divided by the nominal field voltage
Excitation system voltage response time
The time in second for the excitation voltage to attain 95% of the difference between ceiling field voltage and nominal field voltage
2007 ABB Ltd/Chapter 2
21/12/2007
37
UNITROL 6000 Service and Commissioning Training
3.1 Excitation System: Supply Modes
Excitation Systems State of the Art
~
SM
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 38 -
=
SM
1 to 200 A Rotating Exciter Brushless Excitation System
100 to 10000 A Static Excitation System
"State of the art" excitation systems
Generally speaking, two basic configurations of excitation systems are used nowadays. Indirect excitation system (brushless excitation system) This excitation system basically consists of a voltage regulator with power unit, the alternating current machine and the rotary diodes for converting the alternating current generated by the exciter machine into the direct current required by the main machine. The voltage regulator output therefore first controls the field current of the exciter machine. In this machine, the field winding is in the stator. The 3phase alternating current windings in which an AC voltage is induced through the rotation of the rotor lie on the rotor. This AC voltage is converted by means of the diodes which are rotating on the shaft. The direct current is fed, without slip rings, directly into the exciter winding of the main machine. No brushes are therefore necessary, for which reason this type of excitation system is called brushless excitation. Direct excitation system (static excitation system) The static excitation system essentially consists of the voltage regulator, the power unit, a switch and the brushes with slip rings. The power supply to the excitation system is usually taken directly from the generator terminals and transformed in the power unit by means of thyristors into a direct current which is fed via a switch and slip rings to the rotor winding of the main machine. These systems are distinguished by very fast regulating performance.
2007 ABB Ltd/Chapter 2
21/12/2007
38
UNITROL 6000 Service and Commissioning Training
3.1 Excitation System: Supply Modes Comparison: Indirect - Static Excitation System
Brushless excitation
Just positive ceiling voltage capability Exciter response limited by the exciter machine time constant (>200ms) Field discharge with natural time constant Supply from PMG possible providing supporting of short circuit currents
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 39 -
Static Excitation System
Positive and negative ceiling voltage capabilities Fast response (<20 ms) in both directions Fast field discharge by discharge resistor or inverter operation Size of excitation of transformer depends on field requirements only Shorter shaft (torsional oscillations) Maintenance on power rectifier the machine must not be at standstill Direct measurements of field quantities Uf, If possible
Relative large size of exciter machine for low speed generators No sliprings (less maintenance and dust)
Comparison
The diagram shows a comparison of the most important advantages and disadvantages of both systems. It cannot be said straight away which is the better system. The most suitable system has to be determined from case to case.
2007 ABB Ltd/Chapter 2
21/12/2007
39
UNITROL 6000 Service and Commissioning Training
3.1 Excitation System: Supply Modes
Design Example of Static Excitation System
High voltage line
Unit step up transformer
Excitation transformer
AVR
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 43 -
Sn = 210 MVA Un = 15.75 kV Cos n = 0.85 fn = 50 Hz Ifn = 1600 A Ufn = 230 V Ifo = 400 A Xd = 2.1
Sensing PT
=
SM
~
Power Converter
Synchronous machine
Aux. Supply
The static excitation system
This type of excitation system is often used for hydrogenerators and large turbogenerators larger than about 50 MVA with exceptions to clients requirements. The power for the excitation system is taken from the generator terminals. The automatic voltage regulator works through a semiconductor output stage, which is mostly a thyristor converter or an integrated gate bipolar transistor (IGBT) stage. The voltage regulator with the power converter and excitation transformer as well as the field circuit breaker complete the number of the main components of a static excitation system.
2007 ABB Ltd/Chapter 2
21/12/2007
43
UNITROL 6000 Service and Commissioning Training
3.2 Excitation System: Basic Configurations
True-Dual Channel UNITROL AVR with 2 x Automatic & Manual modes for Indirect Excitation Systems
Voltage setpoint
Channel I
Autom. Mode Manual Mode
A M
~ = = =
Follow-up Field current setpoint
Supply
Field current setpoint follow-up
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 46 -
SM
= ~
True dual-channel system
The so-called dual-channel system increases the availability of the excitation system significantly. The dual-channel system is equipped with two identical channels. Each channel includes the regulator functions present in a single-channel system, as described above. If a channel fails, the system switches over automatically to the other channel. Only one channel is in operation at one time (active channel), the other channel is in standby position (passive channel) and is continually matched to the active channel so that a smooth switchover is possible at any time. The operating personnel can select which channel is the active channel. There is no preference as to whether channel I or channel ll is the active channel.
2007 ABB Ltd/Chapter 2
=
Manual Mode
=
Autom. Mode
VOltage setpoint
= ~
M A
Channel II
21/12/2007
46
UNITROL 6000 Service and Commissioning Training
3.2 Excitation System: Basic Configurations
Single Channel Excitation System for Static Excitation System
Voltage Setpoint
Supply
~ = = =
Autom. Mode A
Manual Mode
Follow-up Field current setpoint UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 47 -
SM
System variants for static excitation systems with higher field currents
For higher power outputs it is neither economic nor technically sound to double the thyristor power stage. A solution with variable ac transformer stays out of consideration. Instead the converter is built redundant. Details will be explained later. For this kind of equipment the electronic control channels can be designed as a single channel or double channel.
Single channel for static excitation systems The control signal within the automatic operating mode is supplied by the voltage control amplifier. Within the manual mode the signal comes from a closed loop field current control. Both out put signals are forwarded to the change-over switch to select from Auto to Manual operating mode. The control signal is fed to the pulse generation which generates the firing pulses for the thyristor stage. An automatic follow up functions is balancing the output of the non active regulator to the active one.
2007 ABB Ltd/Chapter 2
21/12/2007
47
UNITROL 6000 Service and Commissioning Training
3.2 Excitation System: Basic Configurations Power Converter Configurations
Economy Configuration Supply (Single Channel) Twin Configuration (Double Channel)
Supply
Pulse Gate control unit Channel1 amplifiers Gate control unit Pulse amplifiers
M M UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 49 -
1 converter
Gate control unit Channel2
Pulse amplifiers
To the field circuit of the machine
To the field circuit of the machine
Power converter configurations
The converter lay-out is defined by the excitation needed for the synchronous machine and the corresponding redundancy requirements. The following standardized designs are available: Simple converter configuration For systems with a low excitation current demand (i.e. a single thyristor converter is sufficient) or if there are no redundancy requirements, the combination of a single channel AVR and integrated pulse amplification with a single thyristor output stage is fully sufficient as shown in the figure above. Redundant converter configuration For excitation systems with large output currents or higher availability requirements the following two designs are available: Redundancy concept (1+1): There are two identical converters connected in parallel of which only one is in operation at a time. By alternatively blocking and releasing the firing pulses to the corresponding converter switch-over is effected in case of failure.
2007 ABB Ltd/Chapter 2
21/12/2007
49
UNITROL 6000 Service and Commissioning Training
3.2 Excitation System: Basic Configurations
TWIN Configuration
Supply
(Dual channel system without converter redundancy)
Channel1
Gate control Pulse unit amplifiers
Channel2
Gate control Pulse unit amplifiers
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 50 M
To the field circuit of the machine
Converter without redundancy The size of the converter is at least the rated field current of the synchronous machine. This means that if there is any failure in the converter, then the excitation system must generate a trip. Example Failures may be for example: Fan failure. Thyristor Failure. Electronic PCB Failure (e.g. CIN board). Converter Over Temperature. Converter Current Measurement Failure. Snubber Fuse.
2007 ABB Ltd/Chapter 2
21/12/2007
50
UNITROL 6000 Service and Commissioning Training
3.2 Excitation System: Basic Configurations
Parallel bridges with n-1 redundant configuration
Channel1
Gate control unit of channel I Final pulse stages Supply
2
M
Channel2 Gate control
unit of channel II
3
M
n
Pulse bus UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 51 M
To the field circuit
Redundant converter configuration
With even higher output currents where the parallel connection of several thyristors is necessary the reliability of the converter is secured by the redundancy concept (n-1). This means that one more parallel converter than necessary is provided. The two channels work through gate control set and intermediate pulse stage on a common pulse busbar. The different redundancy concept (1+1) and (n-1) is chosen because of selectivity reasons of the thyristor fuses. If two converters would operate in parallel, and if a thyristor looses its blocking capability, then a short circuit current starts to flow when the next thyristors are fired. In this case the two new fired thyristors drive a short circuit current into the defective one. And as a consequence we have a series connection of two thyristor fuses in parallel with one thyristor fuse (of the defective thyristor). This arrangement does not assure that the single fuse will blow first. Therefore the converters must be changed over from one to the other. With more than 2 converters in parallel this selectivity is assured.
2007 ABB Ltd/Chapter 2
21/12/2007
51
UNITROL 6000 Service and Commissioning Training
3.3 Excitation System: Field Flashing Field flashing feature
Ug
100%
Softstart
Field flashing off
U>40%
Field flashing characteristic
Usyn
Thyristor bridge starts to conduct
U>10%
t
5s 10s Field flashing OFF Field flashing failed FCB Trip
AVR
Ug
U>40%
Thyristor bridge
Sequence:
Order Fieldbreaker CLOSE Order Excitation ON Pulses to the thyristors are released
Generator
Field flashing breaker Diode Bridge
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 62 -
Field Flashing breaker closes if residual machine voltage is too low Stator voltage raises Field flashing breaker opens The softstart function raises the generator voltage smoothly up to its nominal value.
Auxiliary voltage
Field flashing feature
If the excitation system is supplied by shunt supply, i.e. directly from the generator terminals, then the residual voltage of the generator is sometimes not sufficient to build up the voltage. In such cases, when the excitation is switched on the excitation current is built up with the aid of field flashing. The field flashing consists of a diode bridge and a switch which connects an external auxiliary voltage to the field. It is dimensioned in such a way that the generator voltage is built up to approx. 20%. Once the generator voltage reaches approx. 30-40% of the nominal value, this switch is switched off again. The generator voltage is then built up to nominal value by the main converter. The slow build-up is thereby controlled by means of a softstart ramp implemented in the voltage regulator.
2007 ABB Ltd/Chapter 2
21/12/2007
62
UNITROL 6000 Service and Commissioning Training
3.4 Excitation System: Field Suppression Field Suppression Circuit (Crowbar)
inverter (WR) WR
Ua rc
If (operation)
Ua rc
-Lf.dIf/dt
+ -
+ -
If (field
suppression) Lf Rf Udischarge
- +
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 63 -
RE
Ua rc
- +
Q02
Components of field suppression equipment
The main elements of a field discharge circuit are the field breaker with discharge contact or DC breaker with electronic discharge circuit, the discharge resistor and the overvoltage protection. In addition there is a certain amount of control means. Field breaker (field discharge contactor), DC breaker Generally the field breaker has to interrupt a direct current in a circuit with high inductance. Due to the inductive load the change of current depends on the discharge voltage which is defined by the arc voltage of the breaker. Field breakers are designed specially for this duty. They are equipped with arc chambers and electromagnetic quenching. Modern field breakers are equipped with limiting means such as auxiliary arc gaps, limiting resistors and the important distribution of the grown arc into a row of partial chambers. The result is a much quieter and more constant arc voltage. The most important criterion of a breaker is its interrupting capability. It is determined by several factors. maximum arc voltage maximum interrupted current maximum arc energy.
2007 ABB Ltd/Chapter 2
21/12/2007
63
UNITROL 6000 Service and Commissioning Training
3.4 Excitation System: Field Suppression Static Field Suppression Circuit (Crowbar) with Firing units
+
DC Breaker Firing PCB
CROWBAR
3 4
Crowbar design
1 0 1 1
-V3 -V2
1 2 T
V1 positive overvoltage thyristor
Field discharge II Free wheeling DC breaker
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 64 -
K 2
BOD
K 3
Field winding
Discharge resistor
4
Field discharge I
T K 1
V2 discharge and negative overvoltage thyristor V3 redundant discharge or free wheeling thyristor
5 6 7
-V1
-R02
1 3
Current Measurement
_
I>
2
Overvoltage protection (Crowbar)
The voltages occur during the deexcitation process should with a safety margin always remain below the insulation level of the winding, i.e. below the test voltage, whereby a reduction caused by aging has to be taken in account. The same voltages also appear at the converter output and stress the blocking capability of the thyristors. In addition with salient pole machines inverse induced voltages (back emf) occur during asynchronous operation, that is after falling out of step. Since an inverse current can not pass the thyristors, such voltages rise fast to high amplitudes. Therefore practically without exception a fast acting overvoltage protection is provided, which discharges the field winding over a resistor, if a well defined voltage level is exceeded. Mostly the normal field discharge resistor is also used for this purpose. As sensing devices special pre-selected avalanche diodes (BOD) are used. Current sensors are used to detect current in the field discharge circuit. This criteria is used to supervise the discharge circuit.
2007 ABB Ltd/Chapter 2
21/12/2007
64
UNITROL 6000 Service and Commissioning Training
3.4 Excitation System: Field Suppression
If, Uf [p.u.]
With non-linear resistor
t=0
UNITROL 6000 S&C J680 Chap2 Training6 2007-A ABB Ltd - 65 -
Methods for field suppression
There are several kinds of deexcitation circuits which are partly only of historical interest. Some of them will be described in short below for the better understanding of the whole matter. Basically a field suppression circuit must accelerate the current decrease in the field winding. If we just reduce the voltage of the feeding source to zero, the current will decrease in accordance with the well-known exponential function and with the natural time constant T = L/Rf of the field circuit. By insertion of a discharge resistor in series with the field, e.g. by opening the switch Q02, the effective time constant of the circuit is reduced. We want a fast decrease of the flux. It is important to realize that we can force the flux decrease in the direct axis only. The time constants in the quadrature axis cannot be influenced at all. If we connect a suppression resistor RE equal to the field resistance Rf in series, the effective time constants at no-load Tdo and with load Td are reduced to half the natural value. The time constant of the core TA and the one of the quadrature axis Tqo remain unchanged. The quicker the field decrease in the direct axis is achieved, for instance with the help of a nonlinear suppression resistor, the more significant delayed field decrease in the quadrature axis becomes. This is a passive field suppression method where part of the magnetic energy stored in the field w = L If2 is converted into heat in the discharge resistor. The supply voltage UG must be reduced quickly to zero. Otherwise the field current does not come down to zero and the resistor RE is overloaded. The arrangement is simple and uses a normal dc-breaker.
2007 ABB Ltd/Chapter 2
21/12/2007
65
You might also like
- 7 ZAB - UN6080 Signal and Parameter List v2.0.00 PDF100% (1)7 ZAB - UN6080 Signal and Parameter List v2.0.00 PDF99 pages
- What Is An Excitation System - Reivax North AmericaNo ratings yetWhat Is An Excitation System - Reivax North America16 pages
- A Review of The 1996 National Education SummitNo ratings yetA Review of The 1996 National Education Summit23 pages
- 8 ZAB - UN6080 Alarm and Event List v2.0.00-1 PDFNo ratings yet8 ZAB - UN6080 Alarm and Event List v2.0.00-1 PDF82 pages
- Generator Operation Manual QN1 SEC G 04 TP 004100% (2)Generator Operation Manual QN1 SEC G 04 TP 004187 pages
- UNITROL 5000 User's Manual Appendix,: Unitrol 5000 AVR Controls ON-LINE Maintenance InstructionsNo ratings yetUNITROL 5000 User's Manual Appendix,: Unitrol 5000 AVR Controls ON-LINE Maintenance Instructions18 pages
- Stator End Winding Vibration and Temperature Rise MonitoringNo ratings yetStator End Winding Vibration and Temperature Rise Monitoring8 pages
- Improving Power System Stability Through Integrated Power System Stabilizers - 100520100% (1)Improving Power System Stability Through Integrated Power System Stabilizers - 10052025 pages
- Part I Protection Philosophy of Electrical EquipmentsNo ratings yetPart I Protection Philosophy of Electrical Equipments25 pages
- Gas Insulated Switchgear (GIS) : GeneralNo ratings yetGas Insulated Switchgear (GIS) : General47 pages
- A Novel Simple Reliability Enhancement Switching Topology For Single Phase Buck-Boost InverterNo ratings yetA Novel Simple Reliability Enhancement Switching Topology For Single Phase Buck-Boost Inverter7 pages
- A Novel Start System For An Aircraft Auxiliary PowNo ratings yetA Novel Start System For An Aircraft Auxiliary Pow5 pages
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveNo ratings yetSimulation of Closed Loop Control of Buck Converter Fed DC Motor Drive4 pages
- L T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesNo ratings yetL T D I V F D: Atest Echnological Evelopments N Ariable Requency Rives18 pages
- Speed Control of A Single Phase Induction Motor Using Step-Down CycloconverterNo ratings yetSpeed Control of A Single Phase Induction Motor Using Step-Down Cycloconverter5 pages
- AC Drive Theory and Application: Benefits of Using AC DrivesNo ratings yetAC Drive Theory and Application: Benefits of Using AC Drives8 pages
- Simulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK EnvironmentNo ratings yetSimulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK Environment4 pages
- (212142518) Stepper Motor Control Using MicrocontrollerNo ratings yet(212142518) Stepper Motor Control Using Microcontroller4 pages
- Sipol: Transistorized Excitation Systems For Synchronous Generators100% (1)Sipol: Transistorized Excitation Systems For Synchronous Generators12 pages
- Dimensions Front Office & Housekeeping - CH 4No ratings yetDimensions Front Office & Housekeeping - CH 434 pages
- Living With Maria: Part 2: Written by x-22No ratings yetLiving With Maria: Part 2: Written by x-229 pages
- Write The Letter - (Ka) : Hindi AlphabetsNo ratings yetWrite The Letter - (Ka) : Hindi Alphabets34 pages
- Triple Candlestick Patterns in Forex - HowToTradeNo ratings yetTriple Candlestick Patterns in Forex - HowToTrade18 pages
- Download full Engineering Secure Devices Dominik Merli ebook all chapters100% (1)Download full Engineering Secure Devices Dominik Merli ebook all chapters81 pages
- Trouble Deploying OVF Template From Vsphere Datastore (2117310) - VMware KBNo ratings yetTrouble Deploying OVF Template From Vsphere Datastore (2117310) - VMware KB2 pages
- Complete Download Image Processing The Fundamentals Second Edition Maria Petrou PDF All Chapters100% (1)Complete Download Image Processing The Fundamentals Second Edition Maria Petrou PDF All Chapters67 pages
- REFRIGERATION & AIR CONDITIONING April 2017 PDFNo ratings yetREFRIGERATION & AIR CONDITIONING April 2017 PDF8 pages
- 10 Electronic Systems Electronics A Systems Approach Storey SummaryNo ratings yet10 Electronic Systems Electronics A Systems Approach Storey Summary6 pages
- Droplet Size and Stability of Nano-Emulsions Produced by The Temperature Phase Inversion MethodNo ratings yetDroplet Size and Stability of Nano-Emulsions Produced by The Temperature Phase Inversion Method6 pages
- The Sensory Panel Applied To Textile Goods A New Marketing ToolNo ratings yetThe Sensory Panel Applied To Textile Goods A New Marketing Tool14 pages
























































































- 7 ZAB - UN6080 Signal and Parameter List v2.0.00 PDF7 ZAB - UN6080 Signal and Parameter List v2.0.00 PDF
- What Is An Excitation System - Reivax North AmericaWhat Is An Excitation System - Reivax North America
- UNITROL 5000 User's Manual Appendix,: Unitrol 5000 AVR Controls ON-LINE Maintenance InstructionsUNITROL 5000 User's Manual Appendix,: Unitrol 5000 AVR Controls ON-LINE Maintenance Instructions
- Stator End Winding Vibration and Temperature Rise MonitoringStator End Winding Vibration and Temperature Rise Monitoring
- Improving Power System Stability Through Integrated Power System Stabilizers - 100520Improving Power System Stability Through Integrated Power System Stabilizers - 100520
- Part I Protection Philosophy of Electrical EquipmentsPart I Protection Philosophy of Electrical Equipments
- A Novel Simple Reliability Enhancement Switching Topology For Single Phase Buck-Boost InverterA Novel Simple Reliability Enhancement Switching Topology For Single Phase Buck-Boost Inverter
- A Novel Start System For An Aircraft Auxiliary PowA Novel Start System For An Aircraft Auxiliary Pow
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveSimulation of Closed Loop Control of Buck Converter Fed DC Motor Drive
- L T D I V F D: Atest Echnological Evelopments N Ariable Requency RivesL T D I V F D: Atest Echnological Evelopments N Ariable Requency Rives
- Speed Control of A Single Phase Induction Motor Using Step-Down CycloconverterSpeed Control of A Single Phase Induction Motor Using Step-Down Cycloconverter
- AC Drive Theory and Application: Benefits of Using AC DrivesAC Drive Theory and Application: Benefits of Using AC Drives
- Simulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK EnvironmentSimulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK Environment
- (212142518) Stepper Motor Control Using Microcontroller(212142518) Stepper Motor Control Using Microcontroller
- Sipol: Transistorized Excitation Systems For Synchronous GeneratorsSipol: Transistorized Excitation Systems For Synchronous Generators
- Download full Engineering Secure Devices Dominik Merli ebook all chaptersDownload full Engineering Secure Devices Dominik Merli ebook all chapters
- Trouble Deploying OVF Template From Vsphere Datastore (2117310) - VMware KBTrouble Deploying OVF Template From Vsphere Datastore (2117310) - VMware KB
- Complete Download Image Processing The Fundamentals Second Edition Maria Petrou PDF All ChaptersComplete Download Image Processing The Fundamentals Second Edition Maria Petrou PDF All Chapters
- 10 Electronic Systems Electronics A Systems Approach Storey Summary10 Electronic Systems Electronics A Systems Approach Storey Summary
- Droplet Size and Stability of Nano-Emulsions Produced by The Temperature Phase Inversion MethodDroplet Size and Stability of Nano-Emulsions Produced by The Temperature Phase Inversion Method
- The Sensory Panel Applied To Textile Goods A New Marketing ToolThe Sensory Panel Applied To Textile Goods A New Marketing Tool