Wasan Shakir: University of Technology Conrtol and System Engineering Department Mechatronics Branch
Wasan Shakir: University of Technology Conrtol and System Engineering Department Mechatronics Branch
Download as docx, pdf, or txt
You might also like
- Grandmeister 36 Head Servicedokument 1ADocument36 pagesGrandmeister 36 Head Servicedokument 1AFouquetNo ratings yet
- Problems: Cameron HulseDocument3 pagesProblems: Cameron HulseCameron Hulse100% (1)
- Gallien Krueger Mb150s 150e Service ManualDocument21 pagesGallien Krueger Mb150s 150e Service Manualmichael brahemscha100% (1)
- Project Report Linear SystemsDocument39 pagesProject Report Linear SystemsMd.tanvir Ibny GiasNo ratings yet
- Feedback and Control Systems Laboratory: ECEA107L/E02/2Q2021Document26 pagesFeedback and Control Systems Laboratory: ECEA107L/E02/2Q2021Kim Andre Macaraeg100% (2)
- Solution: (1) : Item (Mpa) (Mpa) 1 120 - 80 0 2 - 120 80 0 3 93 0 - 65 4 - 90 - 15 90 5 120 75 - 75Document4 pagesSolution: (1) : Item (Mpa) (Mpa) 1 120 - 80 0 2 - 120 80 0 3 93 0 - 65 4 - 90 - 15 90 5 120 75 - 75Wasan ShakirNo ratings yet
- Matlab NootbookDocument18 pagesMatlab Nootbookengrmishtiaq100% (1)
- Chapter 8 State Space AnalysisDocument22 pagesChapter 8 State Space AnalysisAli AhmadNo ratings yet
- E102 Using MATLAB in Feedback Systems Part I. Classical DesignDocument18 pagesE102 Using MATLAB in Feedback Systems Part I. Classical DesignLê Tuấn Minh100% (1)
- Assignmnet 2Document8 pagesAssignmnet 2Siddhi SudkeNo ratings yet
- EE 461 - Homework Set #2: due Wednesday, September 10, 5PM ζ ω ω σ ζ ω ω σDocument2 pagesEE 461 - Homework Set #2: due Wednesday, September 10, 5PM ζ ω ω σ ζ ω ω σgirithik14No ratings yet
- Lab No. 3-Block Diagram ReductionDocument12 pagesLab No. 3-Block Diagram ReductionAshno KhanNo ratings yet
- Experiment # 13: Transient and Steady State Response AnalysisDocument19 pagesExperiment # 13: Transient and Steady State Response AnalysisHafeez AliNo ratings yet
- State-Space SystemDocument23 pagesState-Space SystemOmar ElsayedNo ratings yet
- Exp 6 FEEDLABDocument9 pagesExp 6 FEEDLABadrianmortiz28No ratings yet
- CH 11Document44 pagesCH 11Phía trước là bầu trờiNo ratings yet
- MATLAB Desktop Keyboard ShortcutsDocument19 pagesMATLAB Desktop Keyboard ShortcutsJuan GomezNo ratings yet
- Ömer MorgülDocument38 pagesÖmer MorgülutkuNo ratings yet
- Find The State-Space Representation in Phase-Variable Form Using Matlab ADocument6 pagesFind The State-Space Representation in Phase-Variable Form Using Matlab ADuy KhánhNo ratings yet
- Simulation of Inverted Pendulum With Step ResponseDocument8 pagesSimulation of Inverted Pendulum With Step ResponseJohn TysonNo ratings yet
- Exp. No. (8) State Space and Transfer Function ObjectiveDocument8 pagesExp. No. (8) State Space and Transfer Function Objectiveyusuf yuyuNo ratings yet
- Vls I SolutionDocument60 pagesVls I SolutionOla Gf OlamitNo ratings yet
- Linear System Theory: Two Tank Interacting SystemDocument14 pagesLinear System Theory: Two Tank Interacting SystemArun KumarNo ratings yet
- Week 3 MatlabDocument7 pagesWeek 3 MatlabFERHAT BODURNo ratings yet
- Intoduction To AtlabDocument59 pagesIntoduction To AtlabMaria Jafar KhanNo ratings yet
- Mathematical Modelling& Various Control System Models & Responses Using MatlabDocument45 pagesMathematical Modelling& Various Control System Models & Responses Using MatlabJagabandhu KarNo ratings yet
- M Lab Report 5Document9 pagesM Lab Report 5marryam nawazNo ratings yet
- CSD Practical MannualDocument35 pagesCSD Practical MannualitsurturnNo ratings yet
- CT Shail PDFDocument85 pagesCT Shail PDFhocaNo ratings yet
- Clase 1 - Control en MatlabDocument10 pagesClase 1 - Control en MatlabEric MosvelNo ratings yet
- MATLAB ProblemsDocument4 pagesMATLAB ProblemsPriyanka TiwariNo ratings yet
- Experiment-1: AIM: For The Given Train Model, Find The State Space ModelDocument26 pagesExperiment-1: AIM: For The Given Train Model, Find The State Space ModelIchigoNo ratings yet
- Cseexp 9Document17 pagesCseexp 9anas.bepariNo ratings yet
- Power System Simulation Laboratory (EE 474) : Assignment-7Document8 pagesPower System Simulation Laboratory (EE 474) : Assignment-7kiran panditNo ratings yet
- Matlab Fundamentals: Computer-Aided ManufacturingDocument47 pagesMatlab Fundamentals: Computer-Aided ManufacturingAyub PadaniaNo ratings yet
- Sheet 6Document2 pagesSheet 6Apdo MustafaNo ratings yet
- Practical CaseDocument13 pagesPractical Casesreeragks1989No ratings yet
- Module 6: Deadbeat Response Design: Lecture Note 1Document6 pagesModule 6: Deadbeat Response Design: Lecture Note 1JavierLugoNo ratings yet
- Group Assignment 1Document3 pagesGroup Assignment 1geofrey fungoNo ratings yet
- lab_4-1Document9 pageslab_4-1u2108026No ratings yet
- 5 Example - Thin Airfoil TheoryDocument2 pages5 Example - Thin Airfoil TheorybatmanbittuNo ratings yet
- Exercise#1:: (A) Find The Step Response of The Following Transfer FunctionDocument13 pagesExercise#1:: (A) Find The Step Response of The Following Transfer FunctionAsgher KhattakNo ratings yet
- Experiment No 14 2018 BatchDocument14 pagesExperiment No 14 2018 BatchHafeez AliNo ratings yet
- Introduction To MATLABDocument38 pagesIntroduction To MATLABMukt ShahNo ratings yet
- Simulation of Second Order SISO Dynamic System MATLABDocument6 pagesSimulation of Second Order SISO Dynamic System MATLABJohn TysonNo ratings yet
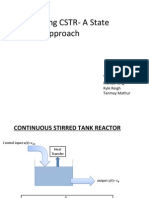
- Modelling CSTR-A State Space Approach: Team CenturionsDocument15 pagesModelling CSTR-A State Space Approach: Team CenturionsTanmay MathurNo ratings yet
- Le Système Non Linéaire Converge Vers Une Trajectoire Différente de Celle Désirait Cela Est Du Au Choix Arbitraire Du Point de La LinearizationDocument5 pagesLe Système Non Linéaire Converge Vers Une Trajectoire Différente de Celle Désirait Cela Est Du Au Choix Arbitraire Du Point de La Linearizationliza haddadNo ratings yet
- State Space RepresentationDocument23 pagesState Space Representationأحمد محمدNo ratings yet
- EML 5311 Project 28 April Ramin ShamshiriDocument33 pagesEML 5311 Project 28 April Ramin ShamshiriRedmond R. ShamshiriNo ratings yet
- Procedure:: Macaraeg, Kim Andre S. Prelimenary Data Sheet (PDS) ECEA107 - E02Document10 pagesProcedure:: Macaraeg, Kim Andre S. Prelimenary Data Sheet (PDS) ECEA107 - E02Kim Andre MacaraegNo ratings yet
- Prac Control 5-06-23Document13 pagesPrac Control 5-06-23Anderson Eduardo Daviran RiveraNo ratings yet
- hw2 SolDocument11 pageshw2 SolSaied Aly SalamahNo ratings yet
- DET hw3Document10 pagesDET hw3Anna SimmonsNo ratings yet
- Matlab Lecture 2Document9 pagesMatlab Lecture 2JackFinNo ratings yet
- Lab 3 State Feedback Control DesignDocument8 pagesLab 3 State Feedback Control DesignMuhammad AsaadNo ratings yet
- Chapter 3Document73 pagesChapter 3omar9aNo ratings yet
- Tutorial-1 Digital DesignDocument2 pagesTutorial-1 Digital Designgeofrey fungoNo ratings yet
- State Variable ModelsDocument13 pagesState Variable Modelsali alaaNo ratings yet
- Experiment - 01: Program To Perform All Marix Operations in MatlabDocument11 pagesExperiment - 01: Program To Perform All Marix Operations in MatlabHarjeet Karan SinghNo ratings yet
- All All: %%QUIZ %%teodoro Rios %% CC:1098814291Document19 pagesAll All: %%QUIZ %%teodoro Rios %% CC:1098814291Teodoro David Rios GarzonNo ratings yet
- Student Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionFrom EverandStudent Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionRating: 4.5 out of 5 stars4.5/5 (2)
- Log-Linear Models, Extensions, and ApplicationsFrom EverandLog-Linear Models, Extensions, and ApplicationsAleksandr AravkinNo ratings yet
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- ON-OFF Pulse Proportional Speed Control of A DC Motor Using Temperature SensorDocument8 pagesON-OFF Pulse Proportional Speed Control of A DC Motor Using Temperature SensorWasan ShakirNo ratings yet
- Micro ReportDocument8 pagesMicro ReportWasan ShakirNo ratings yet
- Republic of Iraq Ministry of Higher Education and Scientific Research University of Technology Control and Systems Engineering DepartmentDocument1 pageRepublic of Iraq Ministry of Higher Education and Scientific Research University of Technology Control and Systems Engineering DepartmentWasan ShakirNo ratings yet
- University of Technology Conrtol and System Engineering DepartmentDocument9 pagesUniversity of Technology Conrtol and System Engineering DepartmentWasan ShakirNo ratings yet
- Design and Manufacturing of Quadcopter: August 2019Document6 pagesDesign and Manufacturing of Quadcopter: August 2019Wasan ShakirNo ratings yet
- Design of Quad Tiltrotor Attitude Control Experiment For ControlDocument57 pagesDesign of Quad Tiltrotor Attitude Control Experiment For ControlWasan ShakirNo ratings yet
- Assignment Name: Investigation of Controllability and Observability For The RLC CircuitDocument4 pagesAssignment Name: Investigation of Controllability and Observability For The RLC CircuitWasan ShakirNo ratings yet
- University of Technology Michatronics Branch: Wasan Shakir Mahmood 4 - Stage Supervisor: Layla HattimDocument13 pagesUniversity of Technology Michatronics Branch: Wasan Shakir Mahmood 4 - Stage Supervisor: Layla HattimWasan ShakirNo ratings yet
- University of Technology Conrtol and System Engineering Department Mechatronics BranchDocument15 pagesUniversity of Technology Conrtol and System Engineering Department Mechatronics BranchWasan ShakirNo ratings yet
- Advantages of A Manual Changeover SwitchDocument2 pagesAdvantages of A Manual Changeover SwitchWasan ShakirNo ratings yet
- Control Lab University of Technology: Segway SystemDocument5 pagesControl Lab University of Technology: Segway SystemWasan ShakirNo ratings yet
- Define, Nanomaterials. Nanocrystalline, Nanotechnology, Cluster, Quantum DotDocument3 pagesDefine, Nanomaterials. Nanocrystalline, Nanotechnology, Cluster, Quantum DotWasan ShakirNo ratings yet
- Image FiterDocument6 pagesImage FiterWasan ShakirNo ratings yet
- Ass Q5Document1 pageAss Q5Wasan ShakirNo ratings yet
- Characterization of Nanomaterials - Ch3-Student 2020 PDFDocument12 pagesCharacterization of Nanomaterials - Ch3-Student 2020 PDFWasan ShakirNo ratings yet
- University of Technology: Control and System DepartmentDocument9 pagesUniversity of Technology: Control and System DepartmentWasan ShakirNo ratings yet
- ADC For NDETDocument25 pagesADC For NDETChaminda Abeysiri NarayanaNo ratings yet
- BPSK Probability of ErrorDocument85 pagesBPSK Probability of Errorمهند عدنان الجعفريNo ratings yet
- On The Bench: DIY Monitor Controller - AudioTechnologyDocument10 pagesOn The Bench: DIY Monitor Controller - AudioTechnologyPim BeimerNo ratings yet
- KSEEB Solutions For Class 7 Maths Chapter 2 Fractions and Decimals Ex 2.4 - KTBS SolutionsDocument12 pagesKSEEB Solutions For Class 7 Maths Chapter 2 Fractions and Decimals Ex 2.4 - KTBS Solutionsprashant.acharyahnr100% (1)
- Decibel Notes (Highlighted)Document8 pagesDecibel Notes (Highlighted)Lara Jane ReyesNo ratings yet
- Digital DistortionDocument10 pagesDigital DistortionGary MaskNo ratings yet
- Mod 2Document121 pagesMod 2xt PAVANNo ratings yet
- Lecture21 TimingDocument16 pagesLecture21 TimingUtkarsh JainNo ratings yet
- 3 3160620 Summer 2022Document1 page3 3160620 Summer 2022HARSH HAMIRANINo ratings yet
- HT Ae12 01Document2 pagesHT Ae12 01Martín Victor BarreraNo ratings yet
- Dual 5.8W Audio Power Amplifier Circuit: Ics For Audio Common UseDocument4 pagesDual 5.8W Audio Power Amplifier Circuit: Ics For Audio Common UseNakia BuenabajoNo ratings yet
- TECHNICAL SPECIFICATION - 600.4 - 800.4 - 1200.4 IndexDocument2 pagesTECHNICAL SPECIFICATION - 600.4 - 800.4 - 1200.4 Indexzain aliNo ratings yet
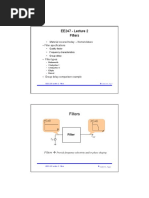
- EE247 - Lecture 2 Filters: - Material Covered Today: - Nomenclature - Filter Specifications - Filter TypesDocument31 pagesEE247 - Lecture 2 Filters: - Material Covered Today: - Nomenclature - Filter Specifications - Filter TypesShahid FareedNo ratings yet
- Advanced Readout Integrated Circuit Signal ProcessingDocument11 pagesAdvanced Readout Integrated Circuit Signal ProcessingOmkar KatkarNo ratings yet
- MVlec 7Document7 pagesMVlec 7Abdul AzizNo ratings yet
- Exp 7 MatlabDocument11 pagesExp 7 MatlabKevin BlotsNo ratings yet
- EE 802-Advanced Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkDocument21 pagesEE 802-Advanced Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkm_usamaNo ratings yet
- BERDocument12 pagesBERThorNo ratings yet
- 5-Eigen-based methods - pisarenko harmonic decompositionDocument19 pages5-Eigen-based methods - pisarenko harmonic decompositionngvanduysn9034No ratings yet
- Btech Cs 6 Sem Data Compression Kcs 064 2023Document2 pagesBtech Cs 6 Sem Data Compression Kcs 064 2023Yash ChauhanNo ratings yet
- Delta X Public AnnouncementDocument3 pagesDelta X Public AnnouncementeslifajardoNo ratings yet
- Speaker Parts Catalog PDFDocument44 pagesSpeaker Parts Catalog PDFAlekey LeonNo ratings yet
- ControlDocument13 pagesControlNiaz ManikNo ratings yet
- Avant 18A - DatasheetDocument2 pagesAvant 18A - DatasheetGerman PeñaNo ratings yet
- Dcby Devils DukeDocument23 pagesDcby Devils DukeTummala JanakiramNo ratings yet