Control Systems and Simulation Laboratory Lab Manual: Department of Electrical and Electronics Engineering
Control Systems and Simulation Laboratory Lab Manual: Department of Electrical and Electronics Engineering
Download as docx, pdf, or txt
You might also like
- Kone LCE Fault CodesDocument28 pagesKone LCE Fault Codesalberto peña100% (3)
- BL0942 App Note - V1.0 - English - Google - TranslatedDocument5 pagesBL0942 App Note - V1.0 - English - Google - Translatedrajaec580% (1)
- CSS Lab ManualDocument68 pagesCSS Lab Manuals masumNo ratings yet
- Csap LabDocument62 pagesCsap LabsivaNo ratings yet
- PSS Lab Manual R15Document57 pagesPSS Lab Manual R15s masumNo ratings yet
- Ee LabDocument71 pagesEe LabsivaNo ratings yet
- Ee Lab IDocument11 pagesEe Lab Iui89ddcdwwvgNo ratings yet
- Fec LabDocument72 pagesFec LabsivaNo ratings yet
- Student Observation Record: Electrical Machines-Ii LabDocument52 pagesStudent Observation Record: Electrical Machines-Ii LabAnushkaNo ratings yet
- Basic Electrical & Electronics Lab Manual: Vemu Institute of Technology::P.KothakotaDocument123 pagesBasic Electrical & Electronics Lab Manual: Vemu Institute of Technology::P.KothakotaTharun kondaNo ratings yet
- IARE Control Systems Lab ManualDocument60 pagesIARE Control Systems Lab ManualAnusha GowdaNo ratings yet
- 23EE102 - Basics of Electrical Circuits Laboratory - Lab Manual - FINALDocument62 pages23EE102 - Basics of Electrical Circuits Laboratory - Lab Manual - FINALSukhee SakthivelNo ratings yet
- Em Lab Manual R15Document51 pagesEm Lab Manual R15s masumNo ratings yet
- EE 10 Course File Lab 1 Circuit SimulationDocument195 pagesEE 10 Course File Lab 1 Circuit Simulationmanoj kumarNo ratings yet
- DCMT Lab Manual R19Document91 pagesDCMT Lab Manual R19s masumNo ratings yet
- Power System Analysis Lab (20A02601P) : Lecture NotesDocument56 pagesPower System Analysis Lab (20A02601P) : Lecture NotessukanyaNo ratings yet
- Ee3014 Peres Lab ManualDocument29 pagesEe3014 Peres Lab Manualpikeco5485100% (2)
- JNTUA Electrical Circuit Analysis Lab Manual R20Document59 pagesJNTUA Electrical Circuit Analysis Lab Manual R20SELVANo ratings yet
- Kee-552 Control System LabDocument55 pagesKee-552 Control System Labmat labNo ratings yet
- PS LabDocument76 pagesPS LabSuman GoddeNo ratings yet
- R15 BE EEE Syllabus 3 8 Sem Final 1Document187 pagesR15 BE EEE Syllabus 3 8 Sem Final 12020201No ratings yet
- PLL and MixerDocument71 pagesPLL and MixerVishwa BharathiNo ratings yet
- EE23131-PEE Lab Manual For CSBSDocument66 pagesEE23131-PEE Lab Manual For CSBSgauthamarjun653No ratings yet
- Embedded Systems Lab ManualDocument48 pagesEmbedded Systems Lab ManualDhanya BhindhyaNo ratings yet
- Relay and High Voltage Laboratory 15eel77 PDFDocument95 pagesRelay and High Voltage Laboratory 15eel77 PDFM.KNo ratings yet
- Bee Lab Manual Printing PDFDocument59 pagesBee Lab Manual Printing PDFVispendra SinghNo ratings yet
- LIC - Lab Record - 2023-24Document74 pagesLIC - Lab Record - 2023-24EZHIL INBAN100% (1)
- EEWP ManualDocument88 pagesEEWP Manualsuresh krishnan100% (1)
- PSS Lab Manual - 18EEL76Document60 pagesPSS Lab Manual - 18EEL76Rohan J EEE-2019-23100% (1)
- ED Lab Student Manua2023-24Document71 pagesED Lab Student Manua2023-24manasaniravindra289No ratings yet
- Panimalar Engineering College: Ec6711 - Embedded Laboratory Iv Ece-Vii SemesterDocument110 pagesPanimalar Engineering College: Ec6711 - Embedded Laboratory Iv Ece-Vii SemesterM Sachin KumarNo ratings yet
- Bmsit PssmanualDocument64 pagesBmsit Pssmanualdivya1587No ratings yet
- Power System Simulation Lab Manual 10EEL78 PDFDocument64 pagesPower System Simulation Lab Manual 10EEL78 PDFDeepak GuptaNo ratings yet
- SRM - Electric Circuits Lab Manual - EditedDocument71 pagesSRM - Electric Circuits Lab Manual - Editedsaishrish817No ratings yet
- Power System Operation & Control - Lab ManualDocument33 pagesPower System Operation & Control - Lab Manualrakesh shuklaNo ratings yet
- Electrcial Circuits Lab Manual 2-1Document79 pagesElectrcial Circuits Lab Manual 2-1اياد النعيميNo ratings yet
- Power Electronics Lab ManualDocument114 pagesPower Electronics Lab ManualramNo ratings yet
- 21 Scheme Bee Lab Manual FinalDocument101 pages21 Scheme Bee Lab Manual FinalSuman naidu RNo ratings yet
- Laboratory Manuals: Basic Electrical Engineering LabDocument39 pagesLaboratory Manuals: Basic Electrical Engineering Labkeshavbansal039No ratings yet
- EMLab II Manual - 19022019 - FinalDocument40 pagesEMLab II Manual - 19022019 - FinalNikitha E KattimaniNo ratings yet
- EDC Lab ManualDocument69 pagesEDC Lab ManualwavezflmNo ratings yet
- Micro Controller Lab Manual 2020Document95 pagesMicro Controller Lab Manual 2020Rahul N1MV19EE073No ratings yet
- HV Manual 2022Document66 pagesHV Manual 2022bhumikanu24No ratings yet
- Power Systems and Simulation Laboratory: Department of Electrical and Electronics EngineeringDocument48 pagesPower Systems and Simulation Laboratory: Department of Electrical and Electronics EngineeringkudupudinageshNo ratings yet
- Power ElectronicsDocument108 pagesPower ElectronicsSHYAM SUNDAR OJHA SHYAMNo ratings yet
- Instrumentation AppliedDocument82 pagesInstrumentation AppliedNavin SabbanNo ratings yet
- AC Electrical Machines Lab Manual 3 - 1Document65 pagesAC Electrical Machines Lab Manual 3 - 1Rockstar RichNo ratings yet
- Edc Lab Observation Gpcet (2016-17)Document67 pagesEdc Lab Observation Gpcet (2016-17)prasannakumar_7No ratings yet
- B M S Institute of Technology Yelahanka, Bangalore-64: Laboratory ManualDocument77 pagesB M S Institute of Technology Yelahanka, Bangalore-64: Laboratory ManualTrang NguyễnNo ratings yet
- Ee19243 Electric Circuits Lab FinalDocument80 pagesEe19243 Electric Circuits Lab FinalkoolvejayNo ratings yet
- BE8261 - BEEIE Lab Manual For II Sem Mech/ AeroDocument123 pagesBE8261 - BEEIE Lab Manual For II Sem Mech/ AeroRAJARAJAN RNo ratings yet
- AEC Lab Manual - CompleteDocument116 pagesAEC Lab Manual - CompleteJinithaNo ratings yet
- Power SystemsDocument47 pagesPower Systemsmanish_chaturvedi_6No ratings yet
- 15eel76 PDFDocument89 pages15eel76 PDFSavitha PandurangiNo ratings yet
- Ee3271 Ec Lab SpcetDocument85 pagesEe3271 Ec Lab SpcetvijayakumarNo ratings yet
- BXE Lab Manual SPPuDocument63 pagesBXE Lab Manual SPPuyashdeshmukh711No ratings yet
- Microcontroller Lab Manual 2020Document95 pagesMicrocontroller Lab Manual 2020Tumkur InfomediaNo ratings yet
- Power Electronic and Power SystemDocument63 pagesPower Electronic and Power SystemDilina Iroshan DissanayakeNo ratings yet
- SwujDocument74 pagesSwujfirsamNo ratings yet
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- Ijrise 2023 1100Document9 pagesIjrise 2023 1100meenaNo ratings yet
- B.Tech. ECE - R23 - Course Structure & II Year SyllabusDocument29 pagesB.Tech. ECE - R23 - Course Structure & II Year Syllabusmeena100% (1)
- Simulation Lab ManualDocument53 pagesSimulation Lab ManualmeenaNo ratings yet
- Fuzzy Logic ControllerDocument7 pagesFuzzy Logic ControllermeenaNo ratings yet
- Matlab: Basic Introduction On MatlabDocument7 pagesMatlab: Basic Introduction On MatlabmeenaNo ratings yet
- Basic Introduction On Matlab: A Textbook ofDocument17 pagesBasic Introduction On Matlab: A Textbook ofmeenaNo ratings yet
- Chapter-3: 3.1 MatlabDocument13 pagesChapter-3: 3.1 MatlabmeenaNo ratings yet
- Proportional Integral (PI) ControlDocument1 pageProportional Integral (PI) ControlmeenaNo ratings yet
- Proportional Resonant Controller (PR)Document3 pagesProportional Resonant Controller (PR)meenaNo ratings yet
- PPE NotesDocument30 pagesPPE NotesmeenaNo ratings yet
- Driver LC 57W 1050ma Fixc LP SNC2 en PDFDocument5 pagesDriver LC 57W 1050ma Fixc LP SNC2 en PDFAlexis Gabriel CondoriNo ratings yet
- TruTrace-system EMGDocument2 pagesTruTrace-system EMGlemanhcuong1503No ratings yet
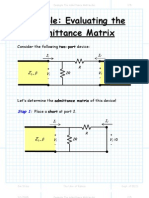
- Example The Admittance MatrixDocument5 pagesExample The Admittance Matrixamando1janNo ratings yet
- FOUNDATION Fieldbus Cable: Data Sheet 10/63-6.67-EN Rev. DDocument8 pagesFOUNDATION Fieldbus Cable: Data Sheet 10/63-6.67-EN Rev. DNelson P. ColoNo ratings yet
- Ready For Telecom Installation (Rfti) Inspection Checklist: Participants Name Position Contact No. CompanyDocument11 pagesReady For Telecom Installation (Rfti) Inspection Checklist: Participants Name Position Contact No. Companyjohn helyNo ratings yet
- EMF An - Instruction ENGDocument2 pagesEMF An - Instruction ENGasssasasNo ratings yet
- DC Poweer Distribution Switch BoardDocument9 pagesDC Poweer Distribution Switch BoardpvenkyNo ratings yet
- Service Manual FE-2: KV-25FX30B KV-25FX30E KV-25FX30K KV-29FX30B KV-29FX30E KV-29FX30KDocument50 pagesService Manual FE-2: KV-25FX30B KV-25FX30E KV-25FX30K KV-29FX30B KV-29FX30E KV-29FX30Kradomir46No ratings yet
- FT4 C PDFDocument5 pagesFT4 C PDFGeorge John AmegashieNo ratings yet
- Advanced Techniques in Power System Protective Relaying PDFDocument332 pagesAdvanced Techniques in Power System Protective Relaying PDFshashikant yadavNo ratings yet
- I48E-EN-01 SigmaServoDrive DatasheetDocument18 pagesI48E-EN-01 SigmaServoDrive DatasheetjuujaaNo ratings yet
- REV AK - SMART BILGE MANUAL-with CertsDocument47 pagesREV AK - SMART BILGE MANUAL-with CertsSujith Panikkadan unnikrishnanNo ratings yet
- Pvi-3.0 3.6 4.2-OutdDocument4 pagesPvi-3.0 3.6 4.2-OutdEngr. Ehsan Elahi MirzaNo ratings yet
- A1Document4 pagesA1hsvskumarNo ratings yet
- Micro-Arcing and Arc Erosion Minimization Using A DC Hybrid Switching DeviceDocument6 pagesMicro-Arcing and Arc Erosion Minimization Using A DC Hybrid Switching DeviceFikri Alvian TanjungNo ratings yet
- RUN Conductors Power Supply (P), Control (Co), Ground (G)Document1 pageRUN Conductors Power Supply (P), Control (Co), Ground (G)Aly As'adNo ratings yet
- Model: AGB2518ZKZ (TAG2522Z) : Technical Data SheetDocument1 pageModel: AGB2518ZKZ (TAG2522Z) : Technical Data SheetZikko Firmansyah100% (2)
- Product Specification InverterDocument2 pagesProduct Specification Invertereko hermawanNo ratings yet
- 40KW DC Charging Pile ManualDocument23 pages40KW DC Charging Pile ManualFernando Joan Ramos RojasNo ratings yet
- F6150 Brochure 04-08Document8 pagesF6150 Brochure 04-08odenir_rodNo ratings yet
- Automatic Waste Sorting Machine - 21 Steps - InstructablesDocument18 pagesAutomatic Waste Sorting Machine - 21 Steps - Instructablesaliagajhonbrayan3No ratings yet
- Hook Up AccelerometerDocument8 pagesHook Up AccelerometerDanang IndraNo ratings yet
- Samarasam May 16 31 2006Document38 pagesSamarasam May 16 31 2006rosgazNo ratings yet
- Multi AmpDocument21 pagesMulti AmpMUHAMMAD KHAIRUL ANUAR BIN JUHARI A22EE0178No ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet
- LBO505 PT 01Document14 pagesLBO505 PT 01subgeniuskittyNo ratings yet
- Power Factor Improvement Using Parallel CapacitorsDocument4 pagesPower Factor Improvement Using Parallel CapacitorsRasheed ShahNo ratings yet
- GC-1F Gen-Set Controller Data Sheet: Standard FunctionsDocument11 pagesGC-1F Gen-Set Controller Data Sheet: Standard FunctionsTavan farazNo ratings yet