
DIY Obstacle Avoiding Robot
DIY Obstacle Avoiding Robot
You might also like
- 100 MCQs On Problem Based LearningDocument18 pages100 MCQs On Problem Based LearningHarsha Samagara100% (3)
- ERBE ICC 200 Electrosurgical UnitDocument2 pagesERBE ICC 200 Electrosurgical UnitOsama Ben DawNo ratings yet
- Power Management SystemDocument51 pagesPower Management Systemsj_hecklers75% (4)
- Voice Controlled RobotDocument54 pagesVoice Controlled RobotHarsha Samagara0% (1)
- Voice Controlled RobotDocument54 pagesVoice Controlled RobotHarsha Samagara0% (1)
- FTTH Aerial InstallationDocument5 pagesFTTH Aerial InstallationMustafa KamalNo ratings yet
- The LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionFrom EverandThe LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionNo ratings yet
- Connecting Esp8266-01 To Arduino Uno/ Mega and Blynk: Amith MP CircuitsarduinoDocument17 pagesConnecting Esp8266-01 To Arduino Uno/ Mega and Blynk: Amith MP CircuitsarduinoJulpan Ongly PangaribuanNo ratings yet
- Esp32 From Anywhere in The WorldDocument17 pagesEsp32 From Anywhere in The WorldPerez GeovanniNo ratings yet
- Grove Starter KitDocument21 pagesGrove Starter KitJavier De La CruzNo ratings yet
- Arduino UnoDocument3 pagesArduino UnoDebi BoleNo ratings yet
- Arduino The Object WayDocument23 pagesArduino The Object Wayopenjavier5208No ratings yet
- Microbit Scratch Game ControllerDocument13 pagesMicrobit Scratch Game ControllerCCNo ratings yet
- How To Built Your Own Coin Slot Operated ComputerDocument9 pagesHow To Built Your Own Coin Slot Operated ComputerSon Ja100% (3)
- Arduino TutorialDocument280 pagesArduino TutorialRohitNo ratings yet
- Arduino "Getting Started" Tutorial: HardwareDocument7 pagesArduino "Getting Started" Tutorial: HardwareMax dos santos ramosNo ratings yet
- Space Invaders - Explore MIT App InventorDocument4 pagesSpace Invaders - Explore MIT App InventorAriyanto AriNo ratings yet
- Arduino Programming Part1 NotesDocument7 pagesArduino Programming Part1 Notesnortheix100% (1)
- stm32 Education Step2Document11 pagesstm32 Education Step2Nanang Roni WibowoNo ratings yet
- FUZEBASIC Programmers Reference GuideDocument253 pagesFUZEBASIC Programmers Reference GuideAndrés G. QuinaNo ratings yet
- ESP32 Troubleshooting GuideDocument8 pagesESP32 Troubleshooting GuideAnirudh nandiNo ratings yet
- NodeMCU Development WorkshopDocument117 pagesNodeMCU Development WorkshopHamdam Nazarov100% (1)
- Simulate Circuits Online: Circuit Simulation Made SimpleDocument4 pagesSimulate Circuits Online: Circuit Simulation Made SimpleMAN4 BANTULNo ratings yet
- Sphero ProposalDocument2 pagesSphero Proposalapi-450643977No ratings yet
- NodeMCU - Getting StartedDocument9 pagesNodeMCU - Getting Startedsreedevikl100% (1)
- DLD Lab 01 - Getting Started With Tinkercad-EditedDocument23 pagesDLD Lab 01 - Getting Started With Tinkercad-Editedsyed mottaquiNo ratings yet
- Module 3 Arduino Overview Hardware Software and InstallationDocument28 pagesModule 3 Arduino Overview Hardware Software and InstallationJonhh Lery BautistaNo ratings yet
- How Kids Can Start Learning IoTDocument2 pagesHow Kids Can Start Learning IoTSulagna ChowdhuryNo ratings yet
- About Software ToolsDocument40 pagesAbout Software ToolsFurqon Madaz XskaMaticNo ratings yet
- C ProgrammingDocument453 pagesC Programmingaditya10prakashiitNo ratings yet
- Diy Uno Play Breadboard Atmega328p With FT232 Breakout BoardDocument8 pagesDiy Uno Play Breadboard Atmega328p With FT232 Breakout BoardRaghav Shetty100% (2)
- Introduction: Oscilloscope Arduino-ProcessingDocument26 pagesIntroduction: Oscilloscope Arduino-ProcessingBenjamin HouseNo ratings yet
- ESP8266 NodeMCU With BME280 Gauges ChartDocument7 pagesESP8266 NodeMCU With BME280 Gauges ChartAlfred SabandarNo ratings yet
- Electronic Eye For Detecting Multi-ColorsDocument47 pagesElectronic Eye For Detecting Multi-ColorsSmaran RachakondaNo ratings yet
- An Event-Driven Arduino QP-nanoDocument33 pagesAn Event-Driven Arduino QP-nanoEldglay Da Silva DomingosNo ratings yet
- How To Program The STM32 - Blue Pill - With Arduino IDE - Arduino - Maker Pro PDFDocument11 pagesHow To Program The STM32 - Blue Pill - With Arduino IDE - Arduino - Maker Pro PDFRaghu VutukuruNo ratings yet
- Scratch Parent Guide v0 3 - EdDocument10 pagesScratch Parent Guide v0 3 - EdsadeteNo ratings yet
- Blynk TrainingDocument20 pagesBlynk TrainingMichael Quinn Farand100% (1)
- Bluetooth Control CarDocument16 pagesBluetooth Control CarThiyaga RajanNo ratings yet
- Espruino Hardware Reference PDFDocument321 pagesEspruino Hardware Reference PDFLucas BrígidaNo ratings yet
- Chapter 5 - Decision Making and LoopingDocument94 pagesChapter 5 - Decision Making and LoopingAcapSuiNo ratings yet
- S8254A E.en - PTDocument24 pagesS8254A E.en - PTleandroNo ratings yet
- Unbox Tinkering: Activity Book Atl Teacher TrainingDocument159 pagesUnbox Tinkering: Activity Book Atl Teacher TrainingNabojyoti GuptaNo ratings yet
- How To Install ArduinoDocument129 pagesHow To Install ArduinoKhaizul ZaimNo ratings yet
- Arduino - Learning 1 200 PDFDocument200 pagesArduino - Learning 1 200 PDFbeffa365100% (1)
- Manual enDocument341 pagesManual enSimona KonyarNo ratings yet
- Arduino PresentationDocument15 pagesArduino PresentationhoriciusNo ratings yet
- Complete Guide For Ultrasonic Sensor HC-SR04 With Arduino: DescriptionDocument10 pagesComplete Guide For Ultrasonic Sensor HC-SR04 With Arduino: DescriptionfloodfreakNo ratings yet
- The Arduino Platform: Resorce PersonDocument31 pagesThe Arduino Platform: Resorce PersonSaad Bin MunirNo ratings yet
- What Is A Development BoardDocument20 pagesWhat Is A Development BoardTALAPANENI SASANKNo ratings yet
- Neil Cameron - ESP32 Formats and CommunicationDocument657 pagesNeil Cameron - ESP32 Formats and CommunicationSai Krishna K VNo ratings yet
- Kolban's Book On C.H.I.P.Document317 pagesKolban's Book On C.H.I.P.thiagocabral88No ratings yet
- Ebook Arduino LeonardoDocument109 pagesEbook Arduino LeonardoToni JunihartonoNo ratings yet
- Arduino Shield ManualDocument24 pagesArduino Shield Manualzhalim2001No ratings yet
- Arduino Robot KitDocument12 pagesArduino Robot KitRohit Vaishampayan100% (1)
- Apple Technician Guide: Mac Mini (Late 2009) and Mac Mini Server (Late 2009)Document148 pagesApple Technician Guide: Mac Mini (Late 2009) and Mac Mini Server (Late 2009)Carlos AlvarNo ratings yet
- Arduino Tinkercad ExperimentsDocument21 pagesArduino Tinkercad ExperimentsStains AbiNo ratings yet
- G10 Adv Week 10 L1 and L2 Ce3653a078Document33 pagesG10 Adv Week 10 L1 and L2 Ce3653a078Eno SaliuNo ratings yet
- Fundamentals of Arduino A Guide To Arduino For Beginners: I. ObjectivesDocument8 pagesFundamentals of Arduino A Guide To Arduino For Beginners: I. ObjectivesJunardNo ratings yet
- Arduino - Ultrasonic SensorDocument17 pagesArduino - Ultrasonic Sensormaruthi631No ratings yet
- Circuit Design Simulation Quick StartDocument190 pagesCircuit Design Simulation Quick StartVitaliy PetlenkoNo ratings yet
- ARDUINODocument13 pagesARDUINOGagleen RissamNo ratings yet
- Arduino WorkshopDocument49 pagesArduino WorkshopTariq AngelNo ratings yet
- Introductory Talk AccreditationDocument10 pagesIntroductory Talk AccreditationHarsha SamagaraNo ratings yet
- Important Points On NBADocument1 pageImportant Points On NBAHarsha SamagaraNo ratings yet
- Result CalculatorDocument3 pagesResult CalculatorHarsha SamagaraNo ratings yet
- "The Future of Coding Is No Coding at All." - : Chris Wanstrath, Ceo at GithubDocument18 pages"The Future of Coding Is No Coding at All." - : Chris Wanstrath, Ceo at GithubHarsha SamagaraNo ratings yet
- Record Img Exp20Document2 pagesRecord Img Exp20Harsha SamagaraNo ratings yet
- Second Year (Responses) - PROGRESS CARDDocument1 pageSecond Year (Responses) - PROGRESS CARDHarsha SamagaraNo ratings yet
- 8 ResonanceDocument21 pages8 ResonanceHarsha SamagaraNo ratings yet
- CIE - Sorter - Copy UnprotectedDocument22 pagesCIE - Sorter - Copy UnprotectedHarsha SamagaraNo ratings yet
- Eue-Lab Final See2Document29 pagesEue-Lab Final See2Harsha SamagaraNo ratings yet
- ES LAB 2021-22 ODD SEM (Harsha)Document4 pagesES LAB 2021-22 ODD SEM (Harsha)Harsha SamagaraNo ratings yet
- 6 DC MotorDocument16 pages6 DC MotorHarsha SamagaraNo ratings yet
- Training of Users NSPDocument141 pagesTraining of Users NSPHarsha SamagaraNo ratings yet
- IIC Online Session CertificateDocument2 pagesIIC Online Session CertificateHarsha SamagaraNo ratings yet
- Directorate of Technical Education Session-2: Nba-CellDocument37 pagesDirectorate of Technical Education Session-2: Nba-CellHarsha SamagaraNo ratings yet
- Directorate of Technical Education NBA-Cell Session-1 Self Assessment Report (Sar) - FillingDocument42 pagesDirectorate of Technical Education NBA-Cell Session-1 Self Assessment Report (Sar) - FillingHarsha SamagaraNo ratings yet
- AICTE Swanath Scheme Document - Sept 2021Document6 pagesAICTE Swanath Scheme Document - Sept 2021Harsha SamagaraNo ratings yet
- About The Scheme - Ps - 16Document4 pagesAbout The Scheme - Ps - 16Harsha SamagaraNo ratings yet
- FF0333 01 Simple Powerpoint TemplateDocument10 pagesFF0333 01 Simple Powerpoint TemplateHarsha SamagaraNo ratings yet
- Quizizz: Project Management Skills - UNIT-1Document24 pagesQuizizz: Project Management Skills - UNIT-1Harsha SamagaraNo ratings yet
- Aicte - Swanath Scholarship Scheme - 2021 - 2022Document2 pagesAicte - Swanath Scholarship Scheme - 2021 - 2022Harsha SamagaraNo ratings yet
- Edit Text Here: This Is A Sample Text. Insert Your Desired Text HereDocument7 pagesEdit Text Here: This Is A Sample Text. Insert Your Desired Text HereHarsha SamagaraNo ratings yet
- Project Title: (Company Name) (Project Lead)Document3 pagesProject Title: (Company Name) (Project Lead)Harsha SamagaraNo ratings yet
- List 1Document60 pagesList 1Harsha SamagaraNo ratings yet
- Department of Collegiate and Technical EducationDocument14 pagesDepartment of Collegiate and Technical EducationHarsha Samagara100% (1)
- Department of Collegiate and Technical EducationDocument11 pagesDepartment of Collegiate and Technical EducationHarsha SamagaraNo ratings yet
- Department of Collegiate and Technical EducationDocument15 pagesDepartment of Collegiate and Technical EducationHarsha Samagara100% (2)
- Department of Collegiate and Technical EducationDocument7 pagesDepartment of Collegiate and Technical EducationHarsha Samagara50% (2)
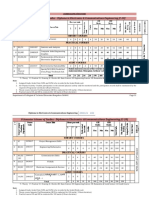
- I Semester Scheme of Studies - Diploma in Electronics & Communications Engineering (C-20)Document2 pagesI Semester Scheme of Studies - Diploma in Electronics & Communications Engineering (C-20)Harsha Samagara100% (1)
- Industrial Solid-State Electronics Devices and Systems by MaloneyDocument680 pagesIndustrial Solid-State Electronics Devices and Systems by MaloneyAngelica Valle RosaNo ratings yet
- Metalux LHB Led High Bay SpecsheetDocument3 pagesMetalux LHB Led High Bay SpecsheetEdgar Martín Sánchez DíazNo ratings yet
- ICT 7 Electronics Chapter 3Document10 pagesICT 7 Electronics Chapter 3Raymond PunoNo ratings yet
- FireWire (IEEE1394) Bus Interface Pinout and Wiring at PinoutsDocument5 pagesFireWire (IEEE1394) Bus Interface Pinout and Wiring at PinoutsniyaanilNo ratings yet
- For Synchronous GeneratorDocument34 pagesFor Synchronous GeneratorNIKESH PATELNo ratings yet
- (Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)Document66 pages(Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)양종렬No ratings yet
- Catalogo Leviton PDFDocument26 pagesCatalogo Leviton PDFrosario medinaNo ratings yet
- Vivid I - S5 - S6 - SN78261Document24 pagesVivid I - S5 - S6 - SN78261Omar Stalin Lucio RonNo ratings yet
- User Manual: For More InformationDocument22 pagesUser Manual: For More InformationRick LongestNo ratings yet
- Alpha ManualDocument8 pagesAlpha ManualAnonymous 60esBJZIjNo ratings yet
- 2030ES Scissor Lift FlyerDocument2 pages2030ES Scissor Lift FlyerVictor LuqueNo ratings yet
- Ecg Machine Contec Type 1200gDocument3 pagesEcg Machine Contec Type 1200gFeliciaSetiawanNo ratings yet
- An Introduction To The Digital Protection of Power Systems - HarbawiDocument163 pagesAn Introduction To The Digital Protection of Power Systems - HarbawiWalber MoraisNo ratings yet
- Sokal & Sokal, Class E, IEEE JSSC Jun'75 p168-176Document9 pagesSokal & Sokal, Class E, IEEE JSSC Jun'75 p168-176jrmciNo ratings yet
- Mojekwu M Engr Project 2Document76 pagesMojekwu M Engr Project 2Mouawia ElazeebiNo ratings yet
- La142r SheetDocument4 pagesLa142r Sheetcigarro3012No ratings yet
- Datasheet EKL8000-E EKL8001-E Rev9eDocument5 pagesDatasheet EKL8000-E EKL8001-E Rev9eSindhu PandreNo ratings yet
- Portable Particles Counter - CCS2Document2 pagesPortable Particles Counter - CCS2Azmi AhmadNo ratings yet
- 5G Physical Layer PDFDocument312 pages5G Physical Layer PDFJurassiclark100% (4)
- Electric Systems Dynamics and Stability With Artificial Intelligence ApplicationsDocument371 pagesElectric Systems Dynamics and Stability With Artificial Intelligence ApplicationsdigilokoNo ratings yet
- 1 Mathematical Modeling of Piezo Electrical Energy Harvesters On Half Dump Truck ModelDocument302 pages1 Mathematical Modeling of Piezo Electrical Energy Harvesters On Half Dump Truck ModelMaLo drissaNo ratings yet
- AC Resistance and Impedance in An AC Circuit PDFDocument20 pagesAC Resistance and Impedance in An AC Circuit PDFKamal CharbelNo ratings yet
- Industrial Training Presentation: Ceylon Electricity BoardDocument16 pagesIndustrial Training Presentation: Ceylon Electricity Boardkavish malakaNo ratings yet
- Tanzbar Manual EnglishDocument17 pagesTanzbar Manual EnglishVangelisNo ratings yet
- Alstom MiCOM P120, P121, P122 and P123 - Universal Overcurrent RelaysDocument12 pagesAlstom MiCOM P120, P121, P122 and P123 - Universal Overcurrent Relaysdave chaudhuryNo ratings yet
- Manual de Instrucciones DCM PDFDocument66 pagesManual de Instrucciones DCM PDFGiuliana Baldeon AtencioNo ratings yet
- YN SeriesDocument3 pagesYN SerieslilireneNo ratings yet

















































































































Download as pdf or txt
You might also like
- 100 MCQs On Problem Based LearningDocument18 pages100 MCQs On Problem Based LearningHarsha Samagara100% (3)
- ERBE ICC 200 Electrosurgical UnitDocument2 pagesERBE ICC 200 Electrosurgical UnitOsama Ben DawNo ratings yet
- Power Management SystemDocument51 pagesPower Management Systemsj_hecklers75% (4)
- Voice Controlled RobotDocument54 pagesVoice Controlled RobotHarsha Samagara0% (1)
- Voice Controlled RobotDocument54 pagesVoice Controlled RobotHarsha Samagara0% (1)
- FTTH Aerial InstallationDocument5 pagesFTTH Aerial InstallationMustafa KamalNo ratings yet
- The LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionFrom EverandThe LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionNo ratings yet
- Connecting Esp8266-01 To Arduino Uno/ Mega and Blynk: Amith MP CircuitsarduinoDocument17 pagesConnecting Esp8266-01 To Arduino Uno/ Mega and Blynk: Amith MP CircuitsarduinoJulpan Ongly PangaribuanNo ratings yet
- Esp32 From Anywhere in The WorldDocument17 pagesEsp32 From Anywhere in The WorldPerez GeovanniNo ratings yet
- Grove Starter KitDocument21 pagesGrove Starter KitJavier De La CruzNo ratings yet
- Arduino UnoDocument3 pagesArduino UnoDebi BoleNo ratings yet
- Arduino The Object WayDocument23 pagesArduino The Object Wayopenjavier5208No ratings yet
- Microbit Scratch Game ControllerDocument13 pagesMicrobit Scratch Game ControllerCCNo ratings yet
- How To Built Your Own Coin Slot Operated ComputerDocument9 pagesHow To Built Your Own Coin Slot Operated ComputerSon Ja100% (3)
- Arduino TutorialDocument280 pagesArduino TutorialRohitNo ratings yet
- Arduino "Getting Started" Tutorial: HardwareDocument7 pagesArduino "Getting Started" Tutorial: HardwareMax dos santos ramosNo ratings yet
- Space Invaders - Explore MIT App InventorDocument4 pagesSpace Invaders - Explore MIT App InventorAriyanto AriNo ratings yet
- Arduino Programming Part1 NotesDocument7 pagesArduino Programming Part1 Notesnortheix100% (1)
- stm32 Education Step2Document11 pagesstm32 Education Step2Nanang Roni WibowoNo ratings yet
- FUZEBASIC Programmers Reference GuideDocument253 pagesFUZEBASIC Programmers Reference GuideAndrés G. QuinaNo ratings yet
- ESP32 Troubleshooting GuideDocument8 pagesESP32 Troubleshooting GuideAnirudh nandiNo ratings yet
- NodeMCU Development WorkshopDocument117 pagesNodeMCU Development WorkshopHamdam Nazarov100% (1)
- Simulate Circuits Online: Circuit Simulation Made SimpleDocument4 pagesSimulate Circuits Online: Circuit Simulation Made SimpleMAN4 BANTULNo ratings yet
- Sphero ProposalDocument2 pagesSphero Proposalapi-450643977No ratings yet
- NodeMCU - Getting StartedDocument9 pagesNodeMCU - Getting Startedsreedevikl100% (1)
- DLD Lab 01 - Getting Started With Tinkercad-EditedDocument23 pagesDLD Lab 01 - Getting Started With Tinkercad-Editedsyed mottaquiNo ratings yet
- Module 3 Arduino Overview Hardware Software and InstallationDocument28 pagesModule 3 Arduino Overview Hardware Software and InstallationJonhh Lery BautistaNo ratings yet
- How Kids Can Start Learning IoTDocument2 pagesHow Kids Can Start Learning IoTSulagna ChowdhuryNo ratings yet
- About Software ToolsDocument40 pagesAbout Software ToolsFurqon Madaz XskaMaticNo ratings yet
- C ProgrammingDocument453 pagesC Programmingaditya10prakashiitNo ratings yet
- Diy Uno Play Breadboard Atmega328p With FT232 Breakout BoardDocument8 pagesDiy Uno Play Breadboard Atmega328p With FT232 Breakout BoardRaghav Shetty100% (2)
- Introduction: Oscilloscope Arduino-ProcessingDocument26 pagesIntroduction: Oscilloscope Arduino-ProcessingBenjamin HouseNo ratings yet
- ESP8266 NodeMCU With BME280 Gauges ChartDocument7 pagesESP8266 NodeMCU With BME280 Gauges ChartAlfred SabandarNo ratings yet
- Electronic Eye For Detecting Multi-ColorsDocument47 pagesElectronic Eye For Detecting Multi-ColorsSmaran RachakondaNo ratings yet
- An Event-Driven Arduino QP-nanoDocument33 pagesAn Event-Driven Arduino QP-nanoEldglay Da Silva DomingosNo ratings yet
- How To Program The STM32 - Blue Pill - With Arduino IDE - Arduino - Maker Pro PDFDocument11 pagesHow To Program The STM32 - Blue Pill - With Arduino IDE - Arduino - Maker Pro PDFRaghu VutukuruNo ratings yet
- Scratch Parent Guide v0 3 - EdDocument10 pagesScratch Parent Guide v0 3 - EdsadeteNo ratings yet
- Blynk TrainingDocument20 pagesBlynk TrainingMichael Quinn Farand100% (1)
- Bluetooth Control CarDocument16 pagesBluetooth Control CarThiyaga RajanNo ratings yet
- Espruino Hardware Reference PDFDocument321 pagesEspruino Hardware Reference PDFLucas BrígidaNo ratings yet
- Chapter 5 - Decision Making and LoopingDocument94 pagesChapter 5 - Decision Making and LoopingAcapSuiNo ratings yet
- S8254A E.en - PTDocument24 pagesS8254A E.en - PTleandroNo ratings yet
- Unbox Tinkering: Activity Book Atl Teacher TrainingDocument159 pagesUnbox Tinkering: Activity Book Atl Teacher TrainingNabojyoti GuptaNo ratings yet
- How To Install ArduinoDocument129 pagesHow To Install ArduinoKhaizul ZaimNo ratings yet
- Arduino - Learning 1 200 PDFDocument200 pagesArduino - Learning 1 200 PDFbeffa365100% (1)
- Manual enDocument341 pagesManual enSimona KonyarNo ratings yet
- Arduino PresentationDocument15 pagesArduino PresentationhoriciusNo ratings yet
- Complete Guide For Ultrasonic Sensor HC-SR04 With Arduino: DescriptionDocument10 pagesComplete Guide For Ultrasonic Sensor HC-SR04 With Arduino: DescriptionfloodfreakNo ratings yet
- The Arduino Platform: Resorce PersonDocument31 pagesThe Arduino Platform: Resorce PersonSaad Bin MunirNo ratings yet
- What Is A Development BoardDocument20 pagesWhat Is A Development BoardTALAPANENI SASANKNo ratings yet
- Neil Cameron - ESP32 Formats and CommunicationDocument657 pagesNeil Cameron - ESP32 Formats and CommunicationSai Krishna K VNo ratings yet
- Kolban's Book On C.H.I.P.Document317 pagesKolban's Book On C.H.I.P.thiagocabral88No ratings yet
- Ebook Arduino LeonardoDocument109 pagesEbook Arduino LeonardoToni JunihartonoNo ratings yet
- Arduino Shield ManualDocument24 pagesArduino Shield Manualzhalim2001No ratings yet
- Arduino Robot KitDocument12 pagesArduino Robot KitRohit Vaishampayan100% (1)
- Apple Technician Guide: Mac Mini (Late 2009) and Mac Mini Server (Late 2009)Document148 pagesApple Technician Guide: Mac Mini (Late 2009) and Mac Mini Server (Late 2009)Carlos AlvarNo ratings yet
- Arduino Tinkercad ExperimentsDocument21 pagesArduino Tinkercad ExperimentsStains AbiNo ratings yet
- G10 Adv Week 10 L1 and L2 Ce3653a078Document33 pagesG10 Adv Week 10 L1 and L2 Ce3653a078Eno SaliuNo ratings yet
- Fundamentals of Arduino A Guide To Arduino For Beginners: I. ObjectivesDocument8 pagesFundamentals of Arduino A Guide To Arduino For Beginners: I. ObjectivesJunardNo ratings yet
- Arduino - Ultrasonic SensorDocument17 pagesArduino - Ultrasonic Sensormaruthi631No ratings yet
- Circuit Design Simulation Quick StartDocument190 pagesCircuit Design Simulation Quick StartVitaliy PetlenkoNo ratings yet
- ARDUINODocument13 pagesARDUINOGagleen RissamNo ratings yet
- Arduino WorkshopDocument49 pagesArduino WorkshopTariq AngelNo ratings yet
- Introductory Talk AccreditationDocument10 pagesIntroductory Talk AccreditationHarsha SamagaraNo ratings yet
- Important Points On NBADocument1 pageImportant Points On NBAHarsha SamagaraNo ratings yet
- Result CalculatorDocument3 pagesResult CalculatorHarsha SamagaraNo ratings yet
- "The Future of Coding Is No Coding at All." - : Chris Wanstrath, Ceo at GithubDocument18 pages"The Future of Coding Is No Coding at All." - : Chris Wanstrath, Ceo at GithubHarsha SamagaraNo ratings yet
- Record Img Exp20Document2 pagesRecord Img Exp20Harsha SamagaraNo ratings yet
- Second Year (Responses) - PROGRESS CARDDocument1 pageSecond Year (Responses) - PROGRESS CARDHarsha SamagaraNo ratings yet
- 8 ResonanceDocument21 pages8 ResonanceHarsha SamagaraNo ratings yet
- CIE - Sorter - Copy UnprotectedDocument22 pagesCIE - Sorter - Copy UnprotectedHarsha SamagaraNo ratings yet
- Eue-Lab Final See2Document29 pagesEue-Lab Final See2Harsha SamagaraNo ratings yet
- ES LAB 2021-22 ODD SEM (Harsha)Document4 pagesES LAB 2021-22 ODD SEM (Harsha)Harsha SamagaraNo ratings yet
- 6 DC MotorDocument16 pages6 DC MotorHarsha SamagaraNo ratings yet
- Training of Users NSPDocument141 pagesTraining of Users NSPHarsha SamagaraNo ratings yet
- IIC Online Session CertificateDocument2 pagesIIC Online Session CertificateHarsha SamagaraNo ratings yet
- Directorate of Technical Education Session-2: Nba-CellDocument37 pagesDirectorate of Technical Education Session-2: Nba-CellHarsha SamagaraNo ratings yet
- Directorate of Technical Education NBA-Cell Session-1 Self Assessment Report (Sar) - FillingDocument42 pagesDirectorate of Technical Education NBA-Cell Session-1 Self Assessment Report (Sar) - FillingHarsha SamagaraNo ratings yet
- AICTE Swanath Scheme Document - Sept 2021Document6 pagesAICTE Swanath Scheme Document - Sept 2021Harsha SamagaraNo ratings yet
- About The Scheme - Ps - 16Document4 pagesAbout The Scheme - Ps - 16Harsha SamagaraNo ratings yet
- FF0333 01 Simple Powerpoint TemplateDocument10 pagesFF0333 01 Simple Powerpoint TemplateHarsha SamagaraNo ratings yet
- Quizizz: Project Management Skills - UNIT-1Document24 pagesQuizizz: Project Management Skills - UNIT-1Harsha SamagaraNo ratings yet
- Aicte - Swanath Scholarship Scheme - 2021 - 2022Document2 pagesAicte - Swanath Scholarship Scheme - 2021 - 2022Harsha SamagaraNo ratings yet
- Edit Text Here: This Is A Sample Text. Insert Your Desired Text HereDocument7 pagesEdit Text Here: This Is A Sample Text. Insert Your Desired Text HereHarsha SamagaraNo ratings yet
- Project Title: (Company Name) (Project Lead)Document3 pagesProject Title: (Company Name) (Project Lead)Harsha SamagaraNo ratings yet
- List 1Document60 pagesList 1Harsha SamagaraNo ratings yet
- Department of Collegiate and Technical EducationDocument14 pagesDepartment of Collegiate and Technical EducationHarsha Samagara100% (1)
- Department of Collegiate and Technical EducationDocument11 pagesDepartment of Collegiate and Technical EducationHarsha SamagaraNo ratings yet
- Department of Collegiate and Technical EducationDocument15 pagesDepartment of Collegiate and Technical EducationHarsha Samagara100% (2)
- Department of Collegiate and Technical EducationDocument7 pagesDepartment of Collegiate and Technical EducationHarsha Samagara50% (2)
- I Semester Scheme of Studies - Diploma in Electronics & Communications Engineering (C-20)Document2 pagesI Semester Scheme of Studies - Diploma in Electronics & Communications Engineering (C-20)Harsha Samagara100% (1)
- Industrial Solid-State Electronics Devices and Systems by MaloneyDocument680 pagesIndustrial Solid-State Electronics Devices and Systems by MaloneyAngelica Valle RosaNo ratings yet
- Metalux LHB Led High Bay SpecsheetDocument3 pagesMetalux LHB Led High Bay SpecsheetEdgar Martín Sánchez DíazNo ratings yet
- ICT 7 Electronics Chapter 3Document10 pagesICT 7 Electronics Chapter 3Raymond PunoNo ratings yet
- FireWire (IEEE1394) Bus Interface Pinout and Wiring at PinoutsDocument5 pagesFireWire (IEEE1394) Bus Interface Pinout and Wiring at PinoutsniyaanilNo ratings yet
- For Synchronous GeneratorDocument34 pagesFor Synchronous GeneratorNIKESH PATELNo ratings yet
- (Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)Document66 pages(Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)양종렬No ratings yet
- Catalogo Leviton PDFDocument26 pagesCatalogo Leviton PDFrosario medinaNo ratings yet
- Vivid I - S5 - S6 - SN78261Document24 pagesVivid I - S5 - S6 - SN78261Omar Stalin Lucio RonNo ratings yet
- User Manual: For More InformationDocument22 pagesUser Manual: For More InformationRick LongestNo ratings yet
- Alpha ManualDocument8 pagesAlpha ManualAnonymous 60esBJZIjNo ratings yet
- 2030ES Scissor Lift FlyerDocument2 pages2030ES Scissor Lift FlyerVictor LuqueNo ratings yet
- Ecg Machine Contec Type 1200gDocument3 pagesEcg Machine Contec Type 1200gFeliciaSetiawanNo ratings yet
- An Introduction To The Digital Protection of Power Systems - HarbawiDocument163 pagesAn Introduction To The Digital Protection of Power Systems - HarbawiWalber MoraisNo ratings yet
- Sokal & Sokal, Class E, IEEE JSSC Jun'75 p168-176Document9 pagesSokal & Sokal, Class E, IEEE JSSC Jun'75 p168-176jrmciNo ratings yet
- Mojekwu M Engr Project 2Document76 pagesMojekwu M Engr Project 2Mouawia ElazeebiNo ratings yet
- La142r SheetDocument4 pagesLa142r Sheetcigarro3012No ratings yet
- Datasheet EKL8000-E EKL8001-E Rev9eDocument5 pagesDatasheet EKL8000-E EKL8001-E Rev9eSindhu PandreNo ratings yet
- Portable Particles Counter - CCS2Document2 pagesPortable Particles Counter - CCS2Azmi AhmadNo ratings yet
- 5G Physical Layer PDFDocument312 pages5G Physical Layer PDFJurassiclark100% (4)
- Electric Systems Dynamics and Stability With Artificial Intelligence ApplicationsDocument371 pagesElectric Systems Dynamics and Stability With Artificial Intelligence ApplicationsdigilokoNo ratings yet
- 1 Mathematical Modeling of Piezo Electrical Energy Harvesters On Half Dump Truck ModelDocument302 pages1 Mathematical Modeling of Piezo Electrical Energy Harvesters On Half Dump Truck ModelMaLo drissaNo ratings yet
- AC Resistance and Impedance in An AC Circuit PDFDocument20 pagesAC Resistance and Impedance in An AC Circuit PDFKamal CharbelNo ratings yet
- Industrial Training Presentation: Ceylon Electricity BoardDocument16 pagesIndustrial Training Presentation: Ceylon Electricity Boardkavish malakaNo ratings yet
- Tanzbar Manual EnglishDocument17 pagesTanzbar Manual EnglishVangelisNo ratings yet
- Alstom MiCOM P120, P121, P122 and P123 - Universal Overcurrent RelaysDocument12 pagesAlstom MiCOM P120, P121, P122 and P123 - Universal Overcurrent Relaysdave chaudhuryNo ratings yet
- Manual de Instrucciones DCM PDFDocument66 pagesManual de Instrucciones DCM PDFGiuliana Baldeon AtencioNo ratings yet
- YN SeriesDocument3 pagesYN SerieslilireneNo ratings yet