Download as pdf or txt
You might also like
- Teacher's Guide For Gregg NotehandDocument45 pagesTeacher's Guide For Gregg Notehandkkd10886% (7)
- DR DC Manual Switch OverDocument3 pagesDR DC Manual Switch OverPranab Kumar DasNo ratings yet
- India DiscoveredDocument156 pagesIndia DiscoveredKaty Simpson100% (1)
- Coach CarterDocument2 pagesCoach CarterEfren VisteNo ratings yet
- Mid Term Solutions PDFDocument2 pagesMid Term Solutions PDFMd Nur-A-Adam DonyNo ratings yet
- Principles of CommunicationDocument42 pagesPrinciples of CommunicationSachin DoddamaniNo ratings yet
- Communication 1Document87 pagesCommunication 1Trường NguyễnNo ratings yet
- HW1 SolutionDocument3 pagesHW1 SolutionZim ShahNo ratings yet
- Linear System TheoryDocument62 pagesLinear System TheoryadhomeworkNo ratings yet
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω t1MV20EE016 BHUVAN PMNo ratings yet
- Interconnect Delay Models: EE695K VLSI InterconnectDocument16 pagesInterconnect Delay Models: EE695K VLSI InterconnectSuyash SinghNo ratings yet
- ELEN3012 - 2020 Part 1Document6 pagesELEN3012 - 2020 Part 1Bongani MofokengNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω tarashixNo ratings yet
- Signals and Systems 02Document8 pagesSignals and Systems 02SamNo ratings yet
- 8.2 Convolución GráficaDocument42 pages8.2 Convolución GráficaAlvaro Pardo SandovalNo ratings yet
- ECE 6151, Spring 2017 Lecture Notes 2: 1 Random ProcessDocument9 pagesECE 6151, Spring 2017 Lecture Notes 2: 1 Random ProcessLtarm LamNo ratings yet
- Review ChapterDocument13 pagesReview ChaptermirosehNo ratings yet
- CF NotesDocument7 pagesCF NotesHồ Nghĩa PhươngNo ratings yet
- 6 Signals Systems (2021-2022)Document25 pages6 Signals Systems (2021-2022)Ehmed BazNo ratings yet
- Convolution and Correlation - TutorialspointDocument12 pagesConvolution and Correlation - TutorialspointSavita BhosleNo ratings yet
- Formulario Transformadas Laplace y EDOODocument1 pageFormulario Transformadas Laplace y EDOOpotasio hNo ratings yet
- Random Process Through A Linear Filter: X (T) Y (T) H (T)Document6 pagesRandom Process Through A Linear Filter: X (T) Y (T) H (T)HarshaNo ratings yet
- Formulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Document11 pagesFormulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Bader AlShakhatrahNo ratings yet
- Continuous & Discrete SystemsDocument14 pagesContinuous & Discrete Systemsopenid_ZufDFRTuNo ratings yet
- Input/output System ModelsDocument4 pagesInput/output System ModelsYassine DjillaliNo ratings yet
- Convolution and Correlation 10Document1 pageConvolution and Correlation 10Harshali WavreNo ratings yet
- FALLSEM2020-21 ECE1004 ETH VL2020210101743 Reference Material I 29-Oct-2020 Laplace TransformDocument7 pagesFALLSEM2020-21 ECE1004 ETH VL2020210101743 Reference Material I 29-Oct-2020 Laplace TransformHARJAP DANDIWALNo ratings yet
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- Circuit Analysis Cheat Sheet 24 06 24-2Document2 pagesCircuit Analysis Cheat Sheet 24 06 24-2zezinNo ratings yet
- Signal Processing Review: 3.1 LTI SystemsDocument22 pagesSignal Processing Review: 3.1 LTI SystemsnctgayarangaNo ratings yet
- Sigsys Lec 3 CH 3aDocument27 pagesSigsys Lec 3 CH 3aRutu ThakkarNo ratings yet
- Formulario PSDocument4 pagesFormulario PSCarlos RebeloNo ratings yet
- Review of Transforms: ECGR 6118 Computer Project: Transforms Student NameDocument25 pagesReview of Transforms: ECGR 6118 Computer Project: Transforms Student NameRyan HillNo ratings yet
- CS Lecture 4Document29 pagesCS Lecture 4sadaf asmaNo ratings yet
- Line IntegralsDocument32 pagesLine Integralsericayaaamankwah1987No ratings yet
- From Fourier Series To Fourier Transform To FFTDocument29 pagesFrom Fourier Series To Fourier Transform To FFTMuhammad Luthfi Al AkbarNo ratings yet
- Solutions HWA Chap 6 7Document8 pagesSolutions HWA Chap 6 7KenNo ratings yet
- Laplace TransferFunctionsDocument23 pagesLaplace TransferFunctionsHera-Mae Granada AñoraNo ratings yet
- Table Properties LTDocument1 pageTable Properties LTxdbenerobeNo ratings yet
- Convolution and CorrelationDocument11 pagesConvolution and CorrelationShameer KhanNo ratings yet
- W3 L1 Slides PDFDocument13 pagesW3 L1 Slides PDFYeison Fabian Fernández MarinNo ratings yet
- ECE 6151, Spring 2017 Lecture Notes: 1 OutlineDocument7 pagesECE 6151, Spring 2017 Lecture Notes: 1 OutlineLam DinhNo ratings yet
- Kinematics DynamicsDocument104 pagesKinematics DynamicsNadiaa AdjoviNo ratings yet
- Exam 2 Cheat SheetDocument3 pagesExam 2 Cheat SheetMac JonesNo ratings yet
- 3 Fourier TransformDocument14 pages3 Fourier TransformHoney PhsNo ratings yet
- Final Study GuideDocument10 pagesFinal Study GuideNaveenTummidiNo ratings yet
- CH 3Document29 pagesCH 3Abraham ChalaNo ratings yet
- Unit 1 Advanced Control TheoryDocument17 pagesUnit 1 Advanced Control TheoryMuskan AgarwalNo ratings yet
- Signals and Systems HomeworkDocument3 pagesSignals and Systems HomeworkVong TithtolaNo ratings yet
- Assignment 3b SolutionsDocument9 pagesAssignment 3b SolutionsvbweuhvbwNo ratings yet
- CS1 NotesDocument27 pagesCS1 NoteswallhumedxxNo ratings yet
- Tutorial 2-2Document2 pagesTutorial 2-2rb6h58qcz5No ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- UPSC Civil Services Main 1979 - Mathematics Calculus: Sunder LalDocument4 pagesUPSC Civil Services Main 1979 - Mathematics Calculus: Sunder Lalsayhigaurav07No ratings yet
- HW1Document2 pagesHW1Nikhil rajNo ratings yet
- Solution of Ordinary Differential Equations: 1 General TheoryDocument3 pagesSolution of Ordinary Differential Equations: 1 General TheoryvlukovychNo ratings yet
- Review 1Document30 pagesReview 1mohammed dowNo ratings yet
- Assignment 3b Solutions 22Document9 pagesAssignment 3b Solutions 22vbweuhvbwNo ratings yet
- 2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyDocument13 pages2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyKurran SinghNo ratings yet
- Linearization TheoriesDocument174 pagesLinearization Theoriessafeer_siddickyNo ratings yet
- UniversityDocument3 pagesUniversitySudo27No ratings yet
- ECEN 314: Signals and Systems: 1 Continuous-Time ConvolutionDocument6 pagesECEN 314: Signals and Systems: 1 Continuous-Time ConvolutionJaanwar DeshNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Nur Azizah - EBAS DSP A Genap 2021Document1 pageNur Azizah - EBAS DSP A Genap 2021M. AnggaNo ratings yet
- Tugas 3 - Metode NumerikDocument3 pagesTugas 3 - Metode NumerikM. AnggaNo ratings yet
- 2021 - w6 Block Diagram Signal Flow GraphDocument20 pages2021 - w6 Block Diagram Signal Flow GraphM. AnggaNo ratings yet
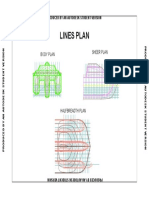
- Lines Plan: Produced by An Autodesk Student VersionDocument1 pageLines Plan: Produced by An Autodesk Student VersionM. AnggaNo ratings yet
- Drawing1-Model 1Document1 pageDrawing1-Model 1M. AnggaNo ratings yet
- Oral CommunicationDocument4 pagesOral CommunicationMhiles Ryan PalomaresNo ratings yet
- XT2000i IP Messages Host Interface Specification Ver 2.0Document37 pagesXT2000i IP Messages Host Interface Specification Ver 2.0piexzNo ratings yet
- Half-Diminished Seventh Chord - WikipediaDocument22 pagesHalf-Diminished Seventh Chord - WikipediaivanNo ratings yet
- Advise Expectation and Obligation WorksheetDocument3 pagesAdvise Expectation and Obligation WorksheetCARLOS ADRIAN HERNANDEZ VERDIALESNo ratings yet
- Shamela Al IftaDocument1 pageShamela Al IftasameersemnaNo ratings yet
- Decolonizing Education PaperDocument19 pagesDecolonizing Education PaperOndaasNo ratings yet
- Jane AustenDocument2 pagesJane Austendfaghdfo;ghdgNo ratings yet
- Styling Links With CSSDocument17 pagesStyling Links With CSSMark Arthur ParinaNo ratings yet
- MS PowerPoint Word Search 2202f8 61633017Document1 pageMS PowerPoint Word Search 2202f8 61633017ella mae llanesNo ratings yet
- Thesis On Nursery RhymesDocument5 pagesThesis On Nursery Rhymesloribowiesiouxfalls100% (2)
- A Practical Introduction To Real-Time Systems For Undergraduate EngineeringDocument745 pagesA Practical Introduction To Real-Time Systems For Undergraduate EngineeringAldo HidayatNo ratings yet
- When, While, Meanwhile, DuringDocument5 pagesWhen, While, Meanwhile, DuringRomiNo ratings yet
- Worksheet 1 3Document3 pagesWorksheet 1 3SHAIRA KAYE CABANTINGNo ratings yet
- Grade 6 Midterm Exam Type BDocument3 pagesGrade 6 Midterm Exam Type BMiss DaliaNo ratings yet
- Cocos Creator v2.0 User Manual: Create or Import ResourcesDocument18 pagesCocos Creator v2.0 User Manual: Create or Import ResourcesHijab BatoolNo ratings yet
- BourneshellDocument71 pagesBourneshellumamaheshbattaNo ratings yet
- Troubleshooting SSLOn MPPDocument139 pagesTroubleshooting SSLOn MPPclobo94No ratings yet
- Force of Eating: Teacher Note Answer KeyDocument6 pagesForce of Eating: Teacher Note Answer KeyfairfurNo ratings yet
- Guitar Tab HallelujahDocument3 pagesGuitar Tab Hallelujahombrimz owner ke2No ratings yet
- Dambudzo Marechera's The House of Hunger - Trauma and Anxiety and The Colonial PastDocument11 pagesDambudzo Marechera's The House of Hunger - Trauma and Anxiety and The Colonial PastHan Nah100% (2)
- Properties of Complex NumbersDocument12 pagesProperties of Complex NumbersBERNARDITA E. GUTIBNo ratings yet
- CMDDocument8 pagesCMDذوالكفلNo ratings yet
- IFEM Ch19Document11 pagesIFEM Ch19wensesNo ratings yet
- Test Bank English Comprehension & CompositionDocument24 pagesTest Bank English Comprehension & Compositionamaroses19No ratings yet
- PL/SQL Questions: 2. Implicit Cursors Are Used For SQL Statements That Are Not NamedDocument5 pagesPL/SQL Questions: 2. Implicit Cursors Are Used For SQL Statements That Are Not NamedVasanth DamodharanNo ratings yet
- Trope (Literature)Document3 pagesTrope (Literature)nico-rod1No ratings yet