Download as pdf
)
/
DIRECT-ON-LINE
OR ee ee
STAR-DELTA\?? rory fox tence?
Guidetines are given for design and operation engineers
Naveed Jabbar, AMIEEEP ‘hat wl essen making the ptinum: choice.
Background
There are number of facts and fallacies (old wives’ tales) that need to be addressed
© There are KESC/WAPDA/Electric Inspector rales on the method employed for starting of particular size of motor.
FALSE!
© Itis the mechanical and electrical considerations of the driven machine and the power supply system that govern the
choice of particular starting method. TRUE!
© Owing to its simplicity, robusiness, and ease of operation, the squirrel cage induction motor is used in 90% of all
applications. TRUE!
Types of Starting
‘The various methods used for starting three-phase squirrel-cage induction motors are:
8) Direct-on-line (or full-voltage)
b) Auto-transformer
) Part-winding :
@) Star-delta
©) Primary-resistance
4) Electronic soft-starer
Of the above, “ditecton-line” and “star-delta” ate the most commonly used and we shall be investigating the applications of
only these two in this paper,
Factors Determining Starting Method
Various mechanical and electrical fuctors need to be looked at while selecting the starting method.
a)
tions
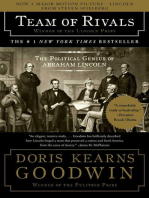
Let us look at a number of torque-speed curves of drives,
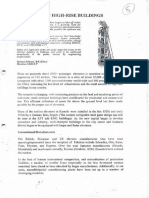
FFig-1 shows the characteristics of three-phase squirrel-cage induction motor between zero speed and synchronous speed
(motor-iorique = My, My, My, My = Mj). Also shown is the characteristic of the driven machine (load forque = My). The
difference between the two torques is the accelerating torque (My).
Paget
M,, = Starting Tore g ie Ac Lie: ie toe
My = Breakdown Torque: .
N, = Syneonows Speed 3
= Breakaway torque ae
Ms = Pulluptraue
The starting torque (M,) must exceed the breakaway torque (M,) of the driven machine by a sufficiently large amount,
and the motor torque (M,.) during the run-up to working speed must always be higher than the load-torque (Mi). On the
other hand, the acceleration torque (My) should remain within limits since otherwise the mechanical tansmission
clements and the driven machine may sustain damage.
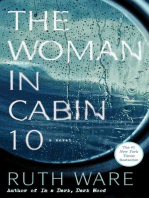
The mechanical design of the machine and the choice of motor, including its rotor torque class, will determine the
amount of starting and accelerating torque available under full-voltage and reduced-voltage starting methods.
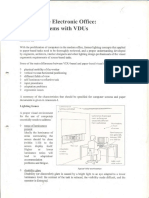
Low Torque Rotor, Medium Torque Motor High Torque motor
Fig-3a Fig-3b Fig-3c
= = Load torque during starting
Fig-3a to 3e show how different rotor torque classes and starting methods are applied for different types of load torques.
For the purposes of this paper, it will be assumed that mechanical considerations do not preclude the use of either “star-
delta” or “ditect-on-tine” starting, and the choice is to be made on electrical considerations only. Its thus imperative that
the “stiffness” of electrical system be analysed and the voltage-dip on starting be approximated so that a decision can be
‘made on the starting method to be employed, as explained below.
Electrical Considerations
Motors when started on full-voltage, i.e. “direct-onsline”, depending upon rating and rotor class draw a starting current
about 6 times their normal full-load current, The power supply system needs to adequately sized to supply this starting
‘current without adversely affecting the motor being started (since the torque varies squarely with respect fo voltage, a
higher dip may not allow the motor to develop the required torque to drive the machine connected to it), or other
Joads/equipment connected to same power supply, as follows:
dropping out of contactor/relays holding-coils, ee., (35%)
extinction of discharge lamps (15%)
speed variation or stopping of motors
Hicker, ic, fluctuation of luminosity of lamps causing physiological discomfort if the Frequency of starting is more
than the perceptibiity threshold
>» failures and computation errors for computers or measuring instrument equipped with electronic devices (>10%)
commutation failure in thyristor bridges operating in inverter mode.
Otherwise, a reduced-vollage starting method will have to be employed.
vyyy
Calculation of Voltage Dip.
‘Two different cases will be examined,
4) Utility supply through transformer
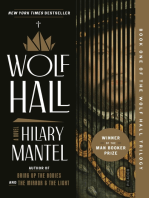
‘The short-cireuit level at the point of common coupling, ie., where the motor is connected to the power system ean
bbe used to calculate the voltaze dip that occurs dur to the high starting current of the motor.
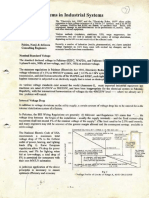
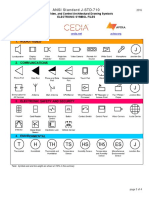
D>, KESC/WAPDA ‘The electrical system shown in Fig-4 shows three buses
where the short-cireuit levels have been calculated as
poe a 25kA, ISkA and SkA.
lecn25h ‘The voltage dip caused by the motor-starting can be
simply calculated by
Inxk
Vadip(%) = x 100
eo=Ska,
Where In = Motor full toad current
. k = Multiplying factor for starting
for DOL, = 2 for SD)
5.5 Ihe = Short-cireuit current
Figs 4
The chart below (Table-/) shows the results of the calculation for the three motors. In order to cater to practical
reduction in the short-circuit current available (owing to the impedance of the utility source, various contact
resistances, ete) a factor of safety of 2 will be used, thus doubling the voltage dip calculated.
Motor FulbLoad [ Sore ‘Actual Voliage Dip Using FOS=2 |
No. | Rating | current
[bot | 80
L_ aia | 1ska | cae [085%
I [IA ian 2a [ska [ 252% [om |
Page-3
One can see from the above, that a 55kW (75hp) motor started DOL at the main LV panel of a 1000kVA transformer would
occasion a voltage-dip of only 4.70%, which is far below the voltage-depression figures that would affect other electrical
equipment. Even a 1 LkW (1Shp) motor started DOL further downstream causes only a 5.04% dip.
In cases where the layout of the entire system is not available for calculation purposes, itis possible to estimate the short
circuit level at any point in an electrical system by measuring the voltage variation from no-load to full-load.
Seine
I BEE «100
Where I, = Short-cireuit level
r Full-load current
y= Voliage-dip from no-load to fall-load
Vo = No-load voltage
‘Thus ata point in electrical system, where the no-load voltage Vp 40SV, and the voltage drops to 400V when a current
of T= 120A is flowing, the short-circuit level is approximately:
le = 12x05
~ 5
At such a location, a 22kW (30hp) motor started DOL would cause a voltage dip not exceeding 5%.
72 kA
KESC/WAPDA,
i
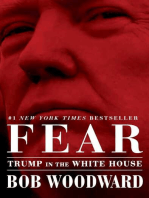
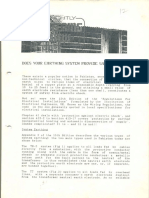
art OS 000 Compared with transformer supplies, which are fairly
we16% (D> x=6% “stifT” (x = 5% - 7%), diesel generating sets had relatively
high internal impedance (x ~ 15% - 22%). ‘Thus the
instantaneous voltage dip at the genset terminals is very
hhigh inspite of the automatic voltage regulator whose
typical function itis to restore the output voltage to within
3% of nominal value within 0.3 ms,
Fig-5 shows the same system as Fig-4, but being fed from
a TSOKVA (x=16%) diesel genset. The corresponding bus
short-circuit levels have reduced 10 6.5KA, 5.5kA and 3kA.
ssi
Figs
The chart below (Tubfe-2) illustrates the higher instantaneous voltage dips,
Full-Load
f Au Vos Dip] _Using FOS=2 |
No | Rating | Curent Dot. 3) bo | sD
MI | SSkW | 98K | 588A) 196A | 25K om | 30% | Teoex | 600%
wa | aauw [ia] 20a |e iska | aerw | tam | age | 208%
wa [aie [aia [asa [aaa] ska [azo [aon | aon | eee
In this example, the DOL starting of SSkW (75hp) motor would cause a dip not exceeding 18%, which may not be acceptable
to discharge lighting and unprotected electronic loads operating on the same system. In this case, “star-delta" starting may be
adopted for this motor ouly. The other two motors, with dips of less than 9%, would experience no problems with “direct-on-
line” starting,
Itis prudent to obtain actual data on gensets proposed to be used (sce Annexure-1), or alternatively, to specify the acceptable
impedance of genset altemators. In critical cases, oversized alternators may provide the economically optimum solution.
Advantages of Full-Voltage Starting
‘Why would one prefer “direct-on-line” to “star-delta” starting? The main reason is cost.
A perusal of Zuble-3 indicates that “star-delta” starting including switchgear and cabling, becomes typically 30% costlier
than “direct-on-line” for motors rated 22kW and above.
Wwe 7 , oo
Rating 3) @
SSW | _Rs.17,000_| Rs 12,000 [Rs 1000 | 9%
TERW_ | Rs. 12,000_|"Rs. 15,000 | Rs.3,000 [25%
DKW | Rs. 16, 000_| Rs. 21,000 | Rs. 5,000_| 31%
SEW | _Rs.23,000_| Rs 31,000 | Rs. 8000 | 34%
TSEW | _Rs.45,000 | Rs. 63,000 | Rs. 18,000 | 40%
Table-3
Additionally “direct-on-line” starting has the advantage of being simple, and consequently more reliable, as there is a
‘minimum of components and complex circuitry.
Finally
i paper outlines the principles involved complex computer programmes are available for a dynamic similation of motor-
starting conditions. In the absence of this tool, it would be advantageous for electrical engineers, designers and! operation/
‘maintenance personnel to carefully:examine each motor-starting case on its own merits, co-ordinate with the mechanical
drive engineers, analyse the charavteristics of the electrical system at the point where the motor is to be installed, and
engineer the optimum solution
Annexure-1
References
“Practical Aspects of Industrial Control Technology”, Telemecanique, France.
“Three-phase Low-Voltage Motors: Explanatory Notes & Application Data, Siemens, Germany
“Motor Application & Maintenance Handbook’, by Robert W. Smeaton, USA
“Electric Motor Manual” by Robert J. Lawrie, USA.
“Motor Starting on Diesel Generators”, by MG. Payne, IEE Electronics & Power Journal, June 1977
6. “Electromagnetic Compatibility, Part-2, Section-1, CEI-1990”, IEC Technical Report No, 1000-2-1
“Caterpillar Generator set Sizing Guide", Caterpillat, USA
IL
3
4
<
(Naveed Jabbar isa Project Engineer with Fahim, Nanji & deSouza, a multiisciplinary consulting firm in building services.
This paper was presented at 17" IEBEP Multi-topic Symposium at Karachi on 3" April 1999.)
Pago.
snes oS ein pue sends weIwe0 “SshiUE pEREIap auobos Sos1UED JO}oU Peds ORLA pUE S189 UOS DION
“seupaedeo vejeraus6 af) uipau 0} se9ds61e0 psU0} 'S12:0400 (AOD MoIEG) eBe\jon mo} 0} 318 SBNIEN YAMS POION
ex A pono Se 100% Aaosde9 PEOLSHO MOL WM Od OSI.
i = = oe s ¥ 7 Ya ze
oon ce = of 8 WN ee
to ste 8 oe yn fee
cor 29 2 08 e022
Se Ser = ou 1 foe
o_o 8 oat 1 soe
oar 2 on 1 e028
oe a s vi foe
Soe t tooe
ro 1 yee
ioe Tt yoe
ver 1 Soe
srr + 90e
or 1 soe
Som vi Soe
or vi 90ee
ar VL See
or L__ bore
or 1 sore
or 1 ore
om vey Sore
or lev. sove
os oevl Sore
is vi Sore
208 Lene
O08 SL due
os ae
085 vw ue
os Mtoe
fed sos
168 vA e088
3 Mtoe
Ed Vso
$89 yw ziSe
599 Me bie
Es Me tise
308 2s 5
08 ‘ose
io8 Mi _sise
108 yu olse
aoe Mo ise
508 Moise
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- T02 - Audiovisual Systems 2022Document23 pagesT02 - Audiovisual Systems 2022naveedfndNo ratings yet
- Attachment To Test Report Iec 62471 European Group Differences and National DifferencesDocument3 pagesAttachment To Test Report Iec 62471 European Group Differences and National DifferencesnaveedfndNo ratings yet
- Voltage Problems in Industrial SystemsDocument9 pagesVoltage Problems in Industrial SystemsnaveedfndNo ratings yet
- Elevators in High Rise BuildingsDocument8 pagesElevators in High Rise BuildingsnaveedfndNo ratings yet
- Page 101Document1 pagePage 101naveedfndNo ratings yet
- Lighting The Electronic Glare Problems With VdusDocument13 pagesLighting The Electronic Glare Problems With VdusnaveedfndNo ratings yet
- Summary ANSI J STD 710 Symbols Aug2018Document2 pagesSummary ANSI J STD 710 Symbols Aug2018naveedfndNo ratings yet
- Electrical Works Technical Specifications (General) : Sr. No.D E S C R I P T I O N Page NoDocument17 pagesElectrical Works Technical Specifications (General) : Sr. No.D E S C R I P T I O N Page NonaveedfndNo ratings yet
- CoatingDocument1 pageCoatingnaveedfndNo ratings yet
- Does Your Earthing System Provide SafetyDocument8 pagesDoes Your Earthing System Provide SafetynaveedfndNo ratings yet
- Earth Leakage ProtectionDocument6 pagesEarth Leakage ProtectionnaveedfndNo ratings yet
- Cable Tray With Cable CleatDocument1 pageCable Tray With Cable CleatnaveedfndNo ratings yet
- Importance of Electrical & MechDocument2 pagesImportance of Electrical & MechnaveedfndNo ratings yet
- A New Control System For High Rise ElevatorsDocument12 pagesA New Control System For High Rise ElevatorsnaveedfndNo ratings yet
- Electricity Supply & TariffDocument6 pagesElectricity Supply & TariffnaveedfndNo ratings yet
- Distribution Generation Aluminium CablesDocument11 pagesDistribution Generation Aluminium CablesnaveedfndNo ratings yet
- SBA5.7Document5 pagesSBA5.7naveedfndNo ratings yet
- Lighting With EconomyDocument6 pagesLighting With EconomynaveedfndNo ratings yet
- Spec 222Document5 pagesSpec 222naveedfndNo ratings yet
- Electrical Equipment Floor Space: Application Paper AP083007ENDocument8 pagesElectrical Equipment Floor Space: Application Paper AP083007ENnaveedfndNo ratings yet
- X618 BrochureDocument8 pagesX618 BrochurenaveedfndNo ratings yet
- Request For Tender: For The Provision of Passenger LiftDocument40 pagesRequest For Tender: For The Provision of Passenger LiftnaveedfndNo ratings yet
- WavePro LT. Busway SystemDocument44 pagesWavePro LT. Busway SystemnaveedfndNo ratings yet
- World Class: Electric LocksDocument32 pagesWorld Class: Electric LocksnaveedfndNo ratings yet
- Abloy: Europrofile Handle Controlled LocksDocument6 pagesAbloy: Europrofile Handle Controlled LocksnaveedfndNo ratings yet
- 209 Guide To Security TurnstilesDocument13 pages209 Guide To Security TurnstilesnaveedfndNo ratings yet