Digital Photogrammetry Made Affordable: Allen, S
Digital Photogrammetry Made Affordable: Allen, S
Download as pdf or txt
You might also like
- OTR Shipper List UnusedDocument287 pagesOTR Shipper List Unusedscott.maison100% (1)
- Multimedia System and Hardware DevicesDocument19 pagesMultimedia System and Hardware Devicesabhay kumarNo ratings yet
- Digital Image ProcessingDocument9 pagesDigital Image ProcessingAndrei VarvarucNo ratings yet
- Smart CameraDocument8 pagesSmart CameraSanthosh SalemNo ratings yet
- Real-Time Face Tracking System For Human-Robot Interact IonDocument6 pagesReal-Time Face Tracking System For Human-Robot Interact IonSAGAR JHA 14BEC1074No ratings yet
- Multimedia Design HardwareDocument23 pagesMultimedia Design HardwareDjhayzel Marc AspeNo ratings yet
- Fundamental Scanner WebcamDocument6 pagesFundamental Scanner WebcamBuddhanath MuduliNo ratings yet
- Basics of ComputerDocument32 pagesBasics of ComputerSushanth ArunNo ratings yet
- Ict NotesDocument35 pagesIct NotesAndy MwirigiNo ratings yet
- 11.embedded Systems+GSDocument10 pages11.embedded Systems+GSSai Kiran VemulaNo ratings yet
- Phase-Ii Machine Vision: Machine Vision (MV) Is The Application of Computer Vision To Industry andDocument7 pagesPhase-Ii Machine Vision: Machine Vision (MV) Is The Application of Computer Vision To Industry andgaurangmarvaniaNo ratings yet
- Inspection - How It WorksDocument10 pagesInspection - How It WorksSergio CruzNo ratings yet
- Computer Architecture and Organization Chapter 5 &6Document22 pagesComputer Architecture and Organization Chapter 5 &6አኖኒ መስNo ratings yet
- Artificial Hand Uisng Embedded Systemslandslide Detection Using Raspberry PiDocument64 pagesArtificial Hand Uisng Embedded Systemslandslide Detection Using Raspberry PiSAHITHINo ratings yet
- EHW Software ProposalDocument11 pagesEHW Software ProposalMemo DinoNo ratings yet
- Computers and Electronics in Agriculture: Hardware-Based Image Processing For High-Speed Inspection of GrainsDocument7 pagesComputers and Electronics in Agriculture: Hardware-Based Image Processing For High-Speed Inspection of GrainsLethargic AzadhirachtaNo ratings yet
- Chapter1b Design MethodDocument32 pagesChapter1b Design Methodbashir belloNo ratings yet
- Architecture For Hardware Driven Image Inspection Based On FpgasDocument9 pagesArchitecture For Hardware Driven Image Inspection Based On FpgasIndraNo ratings yet
- Computer Hardware ThesisDocument7 pagesComputer Hardware Thesisafibykkhxxhdid100% (2)
- Computer: Name: Bernadette DS. Carigma Yr. & Sec.: BA 1-2Document8 pagesComputer: Name: Bernadette DS. Carigma Yr. & Sec.: BA 1-2Badeth CarigmaNo ratings yet
- LBS Data Entry and Office Automation NotesDocument26 pagesLBS Data Entry and Office Automation NotesNIJEESH RAJ N100% (2)
- 20240319042748solar Power Smart Irrigation SystemDocument86 pages20240319042748solar Power Smart Irrigation Systemgangireddypujitha0No ratings yet
- Computer Architecture - Notes2Document101 pagesComputer Architecture - Notes2Sheela SajNo ratings yet
- Chapter 1Document5 pagesChapter 1hariNo ratings yet
- Untitled PresentationDocument15 pagesUntitled Presentationapi-242252351No ratings yet
- Final ReportDocument83 pagesFinal ReportCallme PrinceNo ratings yet
- Chapter-1: Motivating Example: Remote EducationDocument29 pagesChapter-1: Motivating Example: Remote Educationnagendra_ec105393No ratings yet
- PPH ... FtwareDocument3 pagesPPH ... FtwareManoj PatelNo ratings yet
- Frame GrabberDocument3 pagesFrame GrabberVinod HandiNo ratings yet
- Unit-5 Input Output OrganisationDocument19 pagesUnit-5 Input Output OrganisationRishabh SrivastavaNo ratings yet
- DIP Lecture 4 - Components of Image ProcessingDocument4 pagesDIP Lecture 4 - Components of Image ProcessingSamrat BorkarNo ratings yet
- Wa0026.Document9 pagesWa0026.NaveenNo ratings yet
- Koustuv Institute of Self Domain: Wearable ComputersDocument22 pagesKoustuv Institute of Self Domain: Wearable ComputersSwati NandNo ratings yet
- Unit-1 - Merged CgipDocument48 pagesUnit-1 - Merged CgipYashaswini SNo ratings yet
- 2D23D Final Report Team B3Document31 pages2D23D Final Report Team B3Jeremy LeungNo ratings yet
- CS6303 Computer Architecture ACT NotesDocument76 pagesCS6303 Computer Architecture ACT NotesSuryaNo ratings yet
- 2006 05 v-PonganImmersiveTableTennisSimulationDocument5 pages2006 05 v-PonganImmersiveTableTennisSimulationSeby AmaNo ratings yet
- Irjet Anomaly Detection Using OpencvDocument6 pagesIrjet Anomaly Detection Using OpencvThe Bens Mbr 17No ratings yet
- BCS Unit1Document33 pagesBCS Unit1suchethemmanuelNo ratings yet
- Median FilterDocument1 pageMedian FilterDyana RamlyNo ratings yet
- Intorduction To Computer: FA20-BBA-133 Umaira ShaheenDocument4 pagesIntorduction To Computer: FA20-BBA-133 Umaira ShaheenUmaira ShaheenNo ratings yet
- Cs6303 - Computer Architecture Lession Notes Unit I Overview & Instructions 8 Great IdeasDocument98 pagesCs6303 - Computer Architecture Lession Notes Unit I Overview & Instructions 8 Great IdeasGanesh KumarNo ratings yet
- 51 - Graphics and Multimedia - CGDocument22 pages51 - Graphics and Multimedia - CGashishshrivastava340No ratings yet
- Basics of Understanding Machine VisionDocument3 pagesBasics of Understanding Machine VisionPrakash KancharlaNo ratings yet
- Components of An Image Processing SystemDocument3 pagesComponents of An Image Processing SystemKrishanu ModakNo ratings yet
- Face Recognition With 2D-Convolutional Neural NetworkDocument5 pagesFace Recognition With 2D-Convolutional Neural NetworkSupreeth Suhas100% (1)
- Input and Output DevicesDocument43 pagesInput and Output DevicesrohinimNo ratings yet
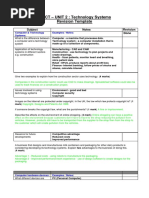
- L2 Ict - UNIT 2: Technology Systems Revision Template: Subject Notes Revision DoneDocument8 pagesL2 Ict - UNIT 2: Technology Systems Revision Template: Subject Notes Revision Doneapi-448604259No ratings yet
- j.dsp.2006.05.006 elseDocument19 pagesj.dsp.2006.05.006 elseansarianam030No ratings yet
- Thor: Whiteboard Capture and Indexing: Mihai Parparita Szymon RusinkiewiczDocument6 pagesThor: Whiteboard Capture and Indexing: Mihai Parparita Szymon RusinkiewiczJyotiiBubnaRungtaNo ratings yet
- Multi Actions - InfoDocument3 pagesMulti Actions - InfoHelderBriosaNo ratings yet
- 3d GlassesDocument12 pages3d Glassesapi-26045568No ratings yet
- 3d GlassesDocument12 pages3d Glassesganasaii3882100% (1)
- Designing A PC Oscilloscope Using FreeduinoDocument11 pagesDesigning A PC Oscilloscope Using FreeduinodiearzNo ratings yet
- The Parts of The ComputerDocument18 pagesThe Parts of The ComputerJuan Diego Moncaleano LópezNo ratings yet
- Chapter 3 Hardware - 2Document337 pagesChapter 3 Hardware - 2ChallNo ratings yet
- Computer Vision Gestures Recognition System Using Centralized Cloud ServerDocument9 pagesComputer Vision Gestures Recognition System Using Centralized Cloud ServerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hardware CourseworkDocument8 pagesHardware Courseworkf634dexc100% (2)
- ComputerDocument13 pagesComputeryicho864No ratings yet
- Computerised Systems Architecture: An embedded systems approachFrom EverandComputerised Systems Architecture: An embedded systems approachNo ratings yet
- Smart Camera: Revolutionizing Visual Perception with Computer VisionFrom EverandSmart Camera: Revolutionizing Visual Perception with Computer VisionNo ratings yet
- Chapter 01 - Process Diagrams PDFDocument18 pagesChapter 01 - Process Diagrams PDFlivlegend92No ratings yet
- Past TenseDocument3 pagesPast TenseJanne MomonnichaNo ratings yet
- Apxvbll15x C I20 2016 6p NormalDocument7 pagesApxvbll15x C I20 2016 6p Normal陳剩0% (1)
- Igh 1202 P 16Document25 pagesIgh 1202 P 16emsxperienceindiaNo ratings yet
- Material Balance PDFDocument5 pagesMaterial Balance PDFMayank VisalparaNo ratings yet
- Geometry Problem Set: 1. Basic StuffsDocument5 pagesGeometry Problem Set: 1. Basic StuffsDalia YesminNo ratings yet
- Vda de Colonel vs. TanjangcoDocument2 pagesVda de Colonel vs. TanjangcoremoveignoranceNo ratings yet
- The Natural Baker A New Way To Bake Using The Best Natural Ingredients by Henrietta InmanDocument320 pagesThe Natural Baker A New Way To Bake Using The Best Natural Ingredients by Henrietta InmanjoyagoworkNo ratings yet
- Bacterial SummaryDocument12 pagesBacterial SummaryLarnie Alejandre100% (1)
- Risk Register AllLevelsDocument5 pagesRisk Register AllLevelsSam Atia100% (1)
- RLS Series-User Manual (RT V1.0)Document27 pagesRLS Series-User Manual (RT V1.0)Timbangan Digital IndonesiaNo ratings yet
- English Proficiency Test SampleDocument14 pagesEnglish Proficiency Test Samplehjgfjh100% (4)
- xp95 Discovery Intelligent Mounting Base Ig 481 Issue 1 PDFDocument2 pagesxp95 Discovery Intelligent Mounting Base Ig 481 Issue 1 PDFSatish Phakade-PawarNo ratings yet
- HCIA-WLAN V3.0 Training Material-3Document100 pagesHCIA-WLAN V3.0 Training Material-3RIVERA SANCHEZ JOHN ALEXNo ratings yet
- Difteri Power PointDocument19 pagesDifteri Power Pointayu_131083No ratings yet
- The Past Present and Future of LanguageDocument142 pagesThe Past Present and Future of LanguageAmber Lorraine LedomaNo ratings yet
- Đề 19 de hsg 7 20142015gia binh.sửaDocument6 pagesĐề 19 de hsg 7 20142015gia binh.sửaThanh Trinh vanNo ratings yet
- Metabolism of Purine and PyrimidineDocument56 pagesMetabolism of Purine and PyrimidineAboubakar Moalim Mahad moh'dNo ratings yet
- Data SheetDocument2 pagesData SheetIsrael GavilanesNo ratings yet
- 211in Model Uses TableDocument1 page211in Model Uses TableFIORELLA ANGELA MARTINEZ MORANo ratings yet
- Bearing SpecificationDocument6 pagesBearing SpecificationSonu SharmaNo ratings yet
- SSGC Duplicate Bill20210323 132303Document1 pageSSGC Duplicate Bill20210323 132303toseef ul islamNo ratings yet
- Modulos de Expansion IomDocument34 pagesModulos de Expansion Iomm.cortezNo ratings yet
- ON The Routine Pile Load Test For The Proposed Construction External Coal Handling Plant at New Mangalore Port, Mangalore QMP 8.2.4 R/ADocument7 pagesON The Routine Pile Load Test For The Proposed Construction External Coal Handling Plant at New Mangalore Port, Mangalore QMP 8.2.4 R/ASimbu ArasanNo ratings yet
- Headhunters of BorneoDocument3 pagesHeadhunters of BorneoJeff McGinnNo ratings yet
- Unit 3 WavesDocument19 pagesUnit 3 Waveskhansuma099No ratings yet
- Transportation Study of Solapur City: Shivanjali Mohite Aishwarya UmbarjeDocument5 pagesTransportation Study of Solapur City: Shivanjali Mohite Aishwarya Umbarjeshivanjali mohiteNo ratings yet
- Shelf Drilling Chaophraya Spec Sheet Mar 2018Document2 pagesShelf Drilling Chaophraya Spec Sheet Mar 2018popohaggag78No ratings yet
- ZE3155Document23 pagesZE3155Angin MalamNo ratings yet