Using DE0-Nano ADC-1
Using DE0-Nano ADC-1
Download as pdf or txt
You might also like
- 2085 Hart MoDem DatasheetDocument8 pages2085 Hart MoDem DatasheetHPC HartNo ratings yet
- Adcanced VHF Power MeterDocument6 pagesAdcanced VHF Power MeterFrancisco J. Aguilera HiguereyNo ratings yet
- Audyssey Setup Guide (2009!10!04)Document11 pagesAudyssey Setup Guide (2009!10!04)dave_upton_1No ratings yet
- Cooling Tower and Chiller Cleaning ProceduresDocument4 pagesCooling Tower and Chiller Cleaning ProceduresAndeska Pratama100% (2)
- Lab4 Using - DE - Series - ADCDocument20 pagesLab4 Using - DE - Series - ADCNguyên Trịnh Vũ Đăng0% (1)
- Using de Series ADCDocument20 pagesUsing de Series ADCAshish SharmaNo ratings yet
- Analog To Digital (ADC) and Digital To Analog (DAC) ConvertersDocument12 pagesAnalog To Digital (ADC) and Digital To Analog (DAC) ConvertersIoana IoanaNo ratings yet
- Bascom Avr Demonstration BoardDocument8 pagesBascom Avr Demonstration BoardNitish KumarNo ratings yet
- Pmodad2 RMDocument2 pagesPmodad2 RMsergioNo ratings yet
- DLC Lab - 10Document7 pagesDLC Lab - 10Didarul Alam AlifNo ratings yet
- spna140aDocument9 pagesspna140aOsvaldo OcantoNo ratings yet
- DLC LAB - 10 - Student - ManualDocument8 pagesDLC LAB - 10 - Student - ManualImtiaj SajinNo ratings yet
- Ad5308 5318 5328 PDFDocument28 pagesAd5308 5318 5328 PDFAndres Fernandez FernandezNo ratings yet
- Applicatoin Note - Phil Zanotti (AD Converter)Document4 pagesApplicatoin Note - Phil Zanotti (AD Converter)arturovinnNo ratings yet
- IC200ACC415 DS RS232 RS485 Interface Adapter VersaMaxMicroNano GFK1834 2002Document1 pageIC200ACC415 DS RS232 RS485 Interface Adapter VersaMaxMicroNano GFK1834 2002jav_08No ratings yet
- ths5661 PDFDocument29 pagesths5661 PDFIqbal AchmadiNo ratings yet
- Dec Exp 6 Student ManualDocument5 pagesDec Exp 6 Student ManualSakib MahmudNo ratings yet
- SmartCard PC Serial ReaderDocument6 pagesSmartCard PC Serial Readermrshare2010No ratings yet
- Interfacing - ADC & DAC: ADC (Analog To Digital Converter)Document8 pagesInterfacing - ADC & DAC: ADC (Analog To Digital Converter)Jagan VNo ratings yet
- AN82527 Intel CorporationDocument22 pagesAN82527 Intel CorporationJorge LuisNo ratings yet
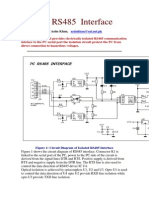
- Interface Rs485Document13 pagesInterface Rs485jol1386100% (1)
- Lecture 04-Embedded Systems-Fall 2023Document23 pagesLecture 04-Embedded Systems-Fall 2023Sherif SaidNo ratings yet
- DAC Utilizing ADCDocument3 pagesDAC Utilizing ADCelfrichNo ratings yet
- Interface Board Manual A5Document20 pagesInterface Board Manual A5SHIREESHA.RNo ratings yet
- Mbi Mbi6030Document28 pagesMbi Mbi6030jian DengNo ratings yet
- D120-P2-T (K) Digitizer Installation InstructionsDocument7 pagesD120-P2-T (K) Digitizer Installation InstructionsFaras AlsaidNo ratings yet
- DEC LAB 06 (Design of A Digital To Analog Converter)Document9 pagesDEC LAB 06 (Design of A Digital To Analog Converter)anon_776365175No ratings yet
- Micro Converter (Analog Device) 12-Bit Adcs and Dacs With Embedded High Speed 62-Kb Flash McuDocument20 pagesMicro Converter (Analog Device) 12-Bit Adcs and Dacs With Embedded High Speed 62-Kb Flash McushaileshNo ratings yet
- The 1.5 Bit-Per-Stage 10-Bit Pipelined CMOS A/D Converter For CMOS Image SensorDocument10 pagesThe 1.5 Bit-Per-Stage 10-Bit Pipelined CMOS A/D Converter For CMOS Image SensorInternational Journal of Power Electronics and Drive SystemsNo ratings yet
- Assgmt 2Document57 pagesAssgmt 2ayulza89No ratings yet
- Adc F09Document61 pagesAdc F09abdala67No ratings yet
- Document On Interfacing ADC With 8051 MicrocontrollerDocument5 pagesDocument On Interfacing ADC With 8051 MicrocontrollerSrideviKumaresanNo ratings yet
- CAN CommunicationDocument12 pagesCAN Communicationsuguamaran mNo ratings yet
- Folding ADC TutorialDocument5 pagesFolding ADC TutorialAlexandre KennedyNo ratings yet
- THDB - Ada: High-Speed A/D and D/A Development KitDocument24 pagesTHDB - Ada: High-Speed A/D and D/A Development KitZarnescu GeorgeNo ratings yet
- Electronics Individual DocumentDocument13 pagesElectronics Individual DocumentkennethNo ratings yet
- Design of LiDAR SystemDocument9 pagesDesign of LiDAR Systemdipak1304No ratings yet
- Model Railroad DCC Command StationDocument12 pagesModel Railroad DCC Command StationLoloNo ratings yet
- Construcción de Tarjeta ADQDocument6 pagesConstrucción de Tarjeta ADQOmar Sahid Hernández RiveraNo ratings yet
- Design and ImplementationDocument4 pagesDesign and ImplementationKrste DimitrievskiNo ratings yet
- Digital System Design I DACDocument9 pagesDigital System Design I DACعبد الحكم زهيرNo ratings yet
- Module 7Document72 pagesModule 7sai manikantaNo ratings yet
- Lab Manual DAC-SignedDocument10 pagesLab Manual DAC-Signedabidrk_21789100% (2)
- Pca 9548 ADocument43 pagesPca 9548 Ahongpeng.tianNo ratings yet
- DMX Dimmer PackDocument6 pagesDMX Dimmer PackcdvsolucionesNo ratings yet
- DAC SummaryDocument4 pagesDAC SummaryHarveNo ratings yet
- Multiplying Dacs: Flexible Building BlocksDocument8 pagesMultiplying Dacs: Flexible Building BlocksLucas McCauleyNo ratings yet
- Analog-Digital Converters: By: Saumya Ranjan BehuraDocument62 pagesAnalog-Digital Converters: By: Saumya Ranjan Behuraparth bhardwajNo ratings yet
- ADE7753 EvalBoardDocument20 pagesADE7753 EvalBoardRicardo Hyppolite FleriscatNo ratings yet
- Data Sheet: 8-Channel, 12-Bit, Configurable ADC/DAC With On-Chip Reference, SPI InterfaceDocument54 pagesData Sheet: 8-Channel, 12-Bit, Configurable ADC/DAC With On-Chip Reference, SPI InterfaceasdNo ratings yet
- Tca 9548 ADocument39 pagesTca 9548 Ahongpeng.tianNo ratings yet
- Dali 2 Click Mikroe-2672Document7 pagesDali 2 Click Mikroe-2672Naveen.R - SonetonixNo ratings yet
- PHILIPS LCD Ch-10.1L LLA-32PFL3605D-40PFL3605D PDFDocument71 pagesPHILIPS LCD Ch-10.1L LLA-32PFL3605D-40PFL3605D PDFAlecsandro BatistaNo ratings yet
- 10-Analog To Digital ConverterDocument41 pages10-Analog To Digital ConverterSamuel ChristianNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Myday Influencers: The Power of Organic Social Media Posts in Marketing Off The Beaten Path DestinationsDocument41 pagesMyday Influencers: The Power of Organic Social Media Posts in Marketing Off The Beaten Path DestinationsCriza Riene SualogNo ratings yet
- SATS2017P2Document24 pagesSATS2017P2Ree 1No ratings yet
- SkySparc Appoints New CEO To Deliver Growth and Service ExcellenceDocument2 pagesSkySparc Appoints New CEO To Deliver Growth and Service ExcellencePR.comNo ratings yet
- (Question) Honey MSDSDocument2 pages(Question) Honey MSDSAndikaNo ratings yet
- Republic Vs IAC and Gonzalvez 175 SCRA 398 PDFDocument9 pagesRepublic Vs IAC and Gonzalvez 175 SCRA 398 PDFMykaNo ratings yet
- RUFINA LUY LIM, Petitioner, vs. COURT OF APPEALSDocument2 pagesRUFINA LUY LIM, Petitioner, vs. COURT OF APPEALSZACH MATTHEW GALENDEZNo ratings yet
- Pre Engineered BLD System PDFDocument104 pagesPre Engineered BLD System PDFSumanthNo ratings yet
- Test Log Assist 1Document10 pagesTest Log Assist 1Prince Abdirisack officialNo ratings yet
- SUBJECT: Elective-I Flexible A.C. Transmission Systems (FACTS) Question Bank Unit-I:Introduction To FactsDocument4 pagesSUBJECT: Elective-I Flexible A.C. Transmission Systems (FACTS) Question Bank Unit-I:Introduction To FactsJagadish Babu KondraguntaNo ratings yet
- BAPCI v. Obias Et AlDocument3 pagesBAPCI v. Obias Et AlMelissa Mae Cailon MareroNo ratings yet
- Our Local Expert 2011-12, Teignbridge and TorbayDocument24 pagesOur Local Expert 2011-12, Teignbridge and TorbayNick HallNo ratings yet
- 04-Analysis of FS With Developed ChecklistDocument32 pages04-Analysis of FS With Developed Checklistyeddy andriansyahNo ratings yet
- Chapter 8 Advanced Accounting Chapter 8 Advanced AccountingDocument22 pagesChapter 8 Advanced Accounting Chapter 8 Advanced AccountingNur AmaliyahNo ratings yet
- Leafy Green Factsheets 1-12 FINAL Web-1Document24 pagesLeafy Green Factsheets 1-12 FINAL Web-1Angel Eduardo Moreno AlboresNo ratings yet
- The Employment and Labour Relations Act, 2004Document84 pagesThe Employment and Labour Relations Act, 2004mapuka100% (1)
- Full-Text STATCONDocument120 pagesFull-Text STATCONJIJAMNNo ratings yet
- Business Success or FailureDocument5 pagesBusiness Success or FailureRay John DulapNo ratings yet
- Cyber Laws Sybcom DDocument11 pagesCyber Laws Sybcom DVettayan VelNo ratings yet
- Case Concerning East Timor (Portugal v. Australia), ICJ Reports, 30 June 1995Document2 pagesCase Concerning East Timor (Portugal v. Australia), ICJ Reports, 30 June 1995Beverlyn JamisonNo ratings yet
- DLL TLE-IA6 WEEK 2 - Q2 by Teacher KJ VALDocument10 pagesDLL TLE-IA6 WEEK 2 - Q2 by Teacher KJ VALJAYMEEH BALUBALNo ratings yet
- WST 2100 Pbach R Me 0042Document206 pagesWST 2100 Pbach R Me 0042teamlc100% (1)
- Fatigue Consideration in DesignDocument3 pagesFatigue Consideration in DesigngouthamNo ratings yet
- Medication Errors:: Don't Let Them Happen To YouDocument6 pagesMedication Errors:: Don't Let Them Happen To YouPhuong Tran100% (1)
- JSP 464 Tri-Service Accommodation Regulations Future Accommodation Model (FAM) Pilot - UK Part 1: DirectiveDocument100 pagesJSP 464 Tri-Service Accommodation Regulations Future Accommodation Model (FAM) Pilot - UK Part 1: DirectiveKebede MichaelNo ratings yet
- ElectiveDocument12 pagesElectiveayoushika abrolNo ratings yet
- Wallace Tree MultiplierDocument11 pagesWallace Tree MultiplierdinuarslanNo ratings yet
- Constitutional Law NCADocument86 pagesConstitutional Law NCAmehtavar67% (3)
- Hydrostop HW PDFDocument87 pagesHydrostop HW PDFann victoriaNo ratings yet