0% found this document useful (0 votes)
37 viewsControl System Assignment - 2024
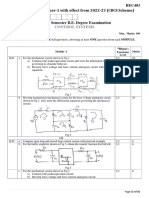
The document provides 10 problems related to control systems for assignment. Students are instructed to solve the problems on paper, create a PDF with their name, roll number and signature, and submit it through a Google form by April 4th. The problems cover topics such as characteristics of PI, PD and PID controllers; root locus analysis; stability analysis of feedback systems; and time domain specifications for transient response.
Uploaded by
Sanjana NetamCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
37 viewsControl System Assignment - 2024
The document provides 10 problems related to control systems for assignment. Students are instructed to solve the problems on paper, create a PDF with their name, roll number and signature, and submit it through a Google form by April 4th. The problems cover topics such as characteristics of PI, PD and PID controllers; root locus analysis; stability analysis of feedback systems; and time domain specifications for transient response.
Uploaded by
Sanjana NetamCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 2