Drilling Parameters Sensors
Drilling Parameters Sensors
Download as pdf or txt
You might also like
- Vibration TransducerDocument7 pagesVibration TransducerPrakash Kumar100% (1)
- Quality Assurance ProcedureDocument13 pagesQuality Assurance ProcedureRahil PiraniNo ratings yet
- Mkm1133 Instrumentation and Control SystemDocument19 pagesMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiNo ratings yet
- Mechanical Engineering Review Manual PDFDocument509 pagesMechanical Engineering Review Manual PDFKenneth SienaNo ratings yet
- Part 2 - Marcet BoilerDocument17 pagesPart 2 - Marcet BoilerAhmad AbudayyehNo ratings yet
- Turbo Supervisory Instruments: Presenter: Chona (C & I)Document25 pagesTurbo Supervisory Instruments: Presenter: Chona (C & I)Morassa Chona100% (2)
- Vibration Monitoring System FinalDocument37 pagesVibration Monitoring System FinaltusharmhaNo ratings yet
- Machine Conditioning Monitoring SystemDocument49 pagesMachine Conditioning Monitoring SystemSanthosh V SamudramNo ratings yet
- Micrometer: ProbeDocument27 pagesMicrometer: ProbeJêmš NavikNo ratings yet
- Vibration and Monitoring Terms GlossaryDocument12 pagesVibration and Monitoring Terms Glossaryyaniprasetyo12No ratings yet
- Basics of Instrumentation & ControlDocument29 pagesBasics of Instrumentation & Controlprathmesh100% (1)
- S.No. TopicsDocument71 pagesS.No. TopicsKratika JainNo ratings yet
- Types of Sensors: ThermistorsDocument16 pagesTypes of Sensors: ThermistorsJinesh VinayachandranNo ratings yet
- ICS Lab ManualDocument28 pagesICS Lab Manualashok_abclNo ratings yet
- Transmitter and Smart TransmitterDocument57 pagesTransmitter and Smart TransmitterBHAGSEN PARVATNo ratings yet
- AlTek PickupsDocument40 pagesAlTek PickupsLuis Alfonso Andler C.100% (1)
- Signal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBDocument7 pagesSignal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBsakthisriniNo ratings yet
- Questions and AnswersDocument15 pagesQuestions and AnswersMahtab GhummanNo ratings yet
- Turbovisory SystemDocument2 pagesTurbovisory SystemLily Sharma100% (1)
- Mechanical Engineering Materials (Group 4) MicroprojectDocument8 pagesMechanical Engineering Materials (Group 4) Microprojectshivamlokhande533No ratings yet
- Solar PanalDocument5 pagesSolar PanalShankar SwamiNo ratings yet
- Week 10 Slide NoteDocument35 pagesWeek 10 Slide NoteJunsyaNo ratings yet
- Earthquake AlarmDocument30 pagesEarthquake AlarmtibbuNo ratings yet
- Fundamental S SensorDocument23 pagesFundamental S SensorKeerthi KumarNo ratings yet
- 1.1 Introduction:-: Function of Power CylinderDocument18 pages1.1 Introduction:-: Function of Power CylinderAbhishek SahaNo ratings yet
- InstrumentationDocument25 pagesInstrumentationnithish.sNo ratings yet
- Transducers 3Document15 pagesTransducers 3Rudra MishraNo ratings yet
- A Review On Various Transformer Testing SystemsDocument4 pagesA Review On Various Transformer Testing Systemsijsret100% (1)
- Transmission of Signals Sergejs BoikoDocument22 pagesTransmission of Signals Sergejs BoikoСергей БойкоNo ratings yet
- Automotive Sensors and Actuators PDFDocument61 pagesAutomotive Sensors and Actuators PDFDeepak NaikNo ratings yet
- Aitek Magnetic Pickups MPU Cat08 - SensorsDocument40 pagesAitek Magnetic Pickups MPU Cat08 - SensorsJose Luis Castro Aguilar0% (1)
- Vibration Monitoring SystemDocument15 pagesVibration Monitoring Systemusmannasrullah100% (1)
- Vibration Measurement & Testing OverviewDocument9 pagesVibration Measurement & Testing Overviewfarouk kherriNo ratings yet
- SEnsorsDocument30 pagesSEnsorsdikoalamNo ratings yet
- Eddy Probe System On The Basis of New Technology: FT L C L I T UDocument6 pagesEddy Probe System On The Basis of New Technology: FT L C L I T UNatthaphon NaosookNo ratings yet
- CTRL Sys Lab ManualDocument46 pagesCTRL Sys Lab Manualabixek100% (2)
- Kenwood DM-81 GDODocument26 pagesKenwood DM-81 GDOtonykoralNo ratings yet
- Sensors in EngineDocument40 pagesSensors in EngineTanzim Rafat AyonNo ratings yet
- The Do S and Don Ts of Pressure TransducersDocument5 pagesThe Do S and Don Ts of Pressure TransducersShankar PediredlaNo ratings yet
- Measurements Lecture 9Document12 pagesMeasurements Lecture 9Aliaa TarekNo ratings yet
- Q3 Reviewer Computer9Document9 pagesQ3 Reviewer Computer9ThesNo ratings yet
- Arduino UnoDocument11 pagesArduino UnoNirav DsouzaNo ratings yet
- SCR Triggering MethodsDocument17 pagesSCR Triggering MethodssriNo ratings yet
- Passive Wireless SAW Temperature SensorsDocument37 pagesPassive Wireless SAW Temperature Sensorskomiks0609No ratings yet
- Transeducer Lab Part 1Document41 pagesTranseducer Lab Part 1Yasser IsteitiehNo ratings yet
- Electronic Pressure SensorsDocument5 pagesElectronic Pressure Sensorsmcbmcb159No ratings yet
- Unit 4 NotesDocument9 pagesUnit 4 NotesPrathamesh BhavsarNo ratings yet
- plugin-9-6-7-2011-10-37-38-MM JournalDocument13 pagesplugin-9-6-7-2011-10-37-38-MM Journalnainesh goteNo ratings yet
- Sicx1003 Unit 2Document66 pagesSicx1003 Unit 2mosadik26No ratings yet
- UNIT - 2 Sensors & TransducersDocument84 pagesUNIT - 2 Sensors & TransducersishaanmittalcollegeNo ratings yet
- Updated Manual-1Document181 pagesUpdated Manual-1Syed Zubair ZahidNo ratings yet
- St5491E 2-Wire Seismic Vibration Transmitter: Installa On ManualDocument8 pagesSt5491E 2-Wire Seismic Vibration Transmitter: Installa On Manualenghemo89No ratings yet
- SA QB Solved Unit 1-2Document26 pagesSA QB Solved Unit 1-2Kundan PednekarNo ratings yet
- Electric Motor Analysis PDFDocument51 pagesElectric Motor Analysis PDFantok09No ratings yet
- Chapter 6 Transducer JAN 2016Document91 pagesChapter 6 Transducer JAN 2016SyedAbuBakar'sAlkaffNo ratings yet
- Hard Reference Sensor Section 8 Electrical Torque 5665001 01Document13 pagesHard Reference Sensor Section 8 Electrical Torque 5665001 01Daniel Rolando Gutierrez FuentesNo ratings yet
- Pressure & Temperature Gause NotesDocument9 pagesPressure & Temperature Gause NotesNazimNo ratings yet
- 162 Vts 2-Wire Seismic Vibration Transmitter: Installation ManualDocument8 pages162 Vts 2-Wire Seismic Vibration Transmitter: Installation ManualEciclei Lima FroesNo ratings yet
- TransdureDocument14 pagesTransdureRana Vivek SinghNo ratings yet
- Transducers AND: Static CharactersticsDocument44 pagesTransducers AND: Static CharactersticsAbhinav RathoreNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Sesimic Method PDFDocument18 pagesSesimic Method PDFMohamad Tayea100% (1)
- Development and Validation Explicitly Coupled Geomechanics Module Compositional Reservoir SimulatorDocument11 pagesDevelopment and Validation Explicitly Coupled Geomechanics Module Compositional Reservoir SimulatorMohamad TayeaNo ratings yet
- Leak-Off Test Interpretation and Modeling With Application To GeomechanicsDocument13 pagesLeak-Off Test Interpretation and Modeling With Application To GeomechanicsMohamad TayeaNo ratings yet
- Geomechanics in Integrated Reservoir ModelingDocument9 pagesGeomechanics in Integrated Reservoir ModelingMohamad TayeaNo ratings yet
- 01 Gas RopDocument189 pages01 Gas RopMohamad TayeaNo ratings yet
- 09 Gas RopDocument57 pages09 Gas RopMohamad TayeaNo ratings yet
- Gas Analysis HanbookDocument288 pagesGas Analysis HanbookMohamad Tayea100% (1)
- Gas Analysis BasicsDocument157 pagesGas Analysis BasicsMohamad TayeaNo ratings yet
- A Sequential Implicit Discrete Fracture Flow-Geomechanics Naturally Fractured PorousDocument11 pagesA Sequential Implicit Discrete Fracture Flow-Geomechanics Naturally Fractured PorousMohamad TayeaNo ratings yet
- Master'S Thesis: Faculty of Science and TechnologyDocument52 pagesMaster'S Thesis: Faculty of Science and TechnologyMohamad TayeaNo ratings yet
- Api Tubular Strengths: 561242111.xls Mitchell Engineering ProgramsDocument2 pagesApi Tubular Strengths: 561242111.xls Mitchell Engineering ProgramsMohamad TayeaNo ratings yet
- Heavi-Wate Drill Pipe Tables: in LB/FT in BBL/FT BBL/FTDocument6 pagesHeavi-Wate Drill Pipe Tables: in LB/FT in BBL/FT BBL/FTMohamad TayeaNo ratings yet
- Multiple Regression Equations: Y A X BDocument1 pageMultiple Regression Equations: Y A X BMohamad TayeaNo ratings yet
- Available Drillstring WOBDocument1 pageAvailable Drillstring WOBMohamad TayeaNo ratings yet
- Pumping Rates For Cement Spacers: 561239603.xls Mitcheell Engineering ProgramsDocument1 pagePumping Rates For Cement Spacers: 561239603.xls Mitcheell Engineering ProgramsMohamad TayeaNo ratings yet
- Casing Cement DesignDocument2 pagesCasing Cement DesignMohamad TayeaNo ratings yet
- Problem Sheet 1Document6 pagesProblem Sheet 1Abdul WahabNo ratings yet
- Chemical Process Technology Exam StructureDocument24 pagesChemical Process Technology Exam Structuresepticmoney100% (1)
- Lab Report 1 Major and Minor LossDocument10 pagesLab Report 1 Major and Minor LossEskiasNo ratings yet
- Industrial InstrumentationDocument2 pagesIndustrial InstrumentationAbhijeeth BabuNo ratings yet
- A Vacuum Primer: by Gary NavrotskiDocument19 pagesA Vacuum Primer: by Gary NavrotskiProcess EngineerNo ratings yet
- 325 A FM L XIM Hydraulic System Testing and AdjustingDocument56 pages325 A FM L XIM Hydraulic System Testing and AdjustingDaniel TekleNo ratings yet
- MAE 306 Exp 2 Air Speed Measurement UpdatedDocument19 pagesMAE 306 Exp 2 Air Speed Measurement UpdatedEvan YoungbergNo ratings yet
- Procedimiento de Calibracion de Variflow Muy Importante PDFDocument31 pagesProcedimiento de Calibracion de Variflow Muy Importante PDFJorge Kovach AlvaradoNo ratings yet
- SFE BMP180 ExampleDocument4 pagesSFE BMP180 ExampleJustin ShearerNo ratings yet
- Aermec ANL Installation Maintenance Manual EngDocument36 pagesAermec ANL Installation Maintenance Manual EngSadiq AmeerNo ratings yet
- ADC3133I - 622 Series Delivery SystemDocument2 pagesADC3133I - 622 Series Delivery SystemEdwin RodríguezNo ratings yet
- Btanl0200rev2en 001Document13 pagesBtanl0200rev2en 001TajmirMahmudNo ratings yet
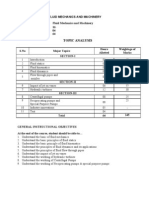
- 2.fluid Mechanics and MachinesDocument9 pages2.fluid Mechanics and MachinesVikram RaoNo ratings yet
- Fluid Machinery 1Document30 pagesFluid Machinery 1Shashi Bhushan Kumar0% (1)
- ST - 13.06 Steam Traps, Seal Water and Service Piping ArrangementsDocument29 pagesST - 13.06 Steam Traps, Seal Water and Service Piping ArrangementsMaksim.em001No ratings yet
- Honeywell DCS Curriculum DocumentDocument9 pagesHoneywell DCS Curriculum DocumentHamdan SidekNo ratings yet
- Compressed Gas Systems: Ee-527: MicrofabricationDocument34 pagesCompressed Gas Systems: Ee-527: MicrofabricationsambasivammeNo ratings yet
- Sprinkler Pressure Gauge LF PGXDocument1 pageSprinkler Pressure Gauge LF PGXAwais MumtazNo ratings yet
- Balometer Ebt721 AlnorDocument3 pagesBalometer Ebt721 AlnorAlex Wellington SallesNo ratings yet
- Kane 458s ManualDocument36 pagesKane 458s ManualAnresNo ratings yet
- Industrial Type Pressure GaugeDocument4 pagesIndustrial Type Pressure GaugeSandi AslanNo ratings yet
- r05220302 Mechanics of FluidsDocument8 pagesr05220302 Mechanics of FluidsSRINIVASA RAO GANTANo ratings yet
- Mechanical Technical QuestionsDocument85 pagesMechanical Technical QuestionsManimurugan NksNo ratings yet
- Pressure Test in Accordance With The Standard Din en 13445: Inspecta GroupDocument14 pagesPressure Test in Accordance With The Standard Din en 13445: Inspecta GroupNanang PhNo ratings yet
- Selftest - Trouble Shooting 8.2xDocument5 pagesSelftest - Trouble Shooting 8.2xKyawsithu SoeNo ratings yet
- Trial Fizik JWPP K1 Set A 2020Document36 pagesTrial Fizik JWPP K1 Set A 2020Walter WeeNo ratings yet
- VAV Terminal Units: MaterialsDocument11 pagesVAV Terminal Units: MaterialsKhengling LimNo ratings yet
- Proceq Operating Instructions Dyna EDocument35 pagesProceq Operating Instructions Dyna Ecristina_romanescuNo ratings yet