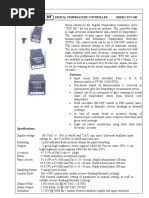
JLD612 Manual
JLD612 Manual
Download as pdf or txt
You might also like
- Aw50 40.aw50 42Document8 pagesAw50 40.aw50 42eedee393% (14)
- JLD614 ManualDocument8 pagesJLD614 ManualJ.R. VincentNo ratings yet
- SchunkDocument8 pagesSchunkEvTech Phil100% (1)
- Instruments Washer Disinfector: Your Health, Our TechnologyDocument12 pagesInstruments Washer Disinfector: Your Health, Our TechnologymateoNo ratings yet
- 2013年最新版英文电气原理图FUJI WIRING DIAGRAM IN ENGLISH-1 PDFDocument21 pages2013年最新版英文电气原理图FUJI WIRING DIAGRAM IN ENGLISH-1 PDFTristan Marcel100% (1)
- JLD612 ManualDocument7 pagesJLD612 Manualtellner100% (1)
- Tet-612 Pid ManualDocument7 pagesTet-612 Pid ManualvhelectronicaNo ratings yet
- XMT7100 Temperature Temp Controller SSR Output Drive Arizona Phoenix - 3Document10 pagesXMT7100 Temperature Temp Controller SSR Output Drive Arizona Phoenix - 3Pedro SousaNo ratings yet
- Instruction Manual: 1. Product HighlightsDocument7 pagesInstruction Manual: 1. Product HighlightsNick RossNo ratings yet
- JLD612 Manual 2011Document8 pagesJLD612 Manual 2011cacaNo ratings yet
- Instruction Manual: PID Temperature Controllers For Espresso Machines - 09/08/2007Document12 pagesInstruction Manual: PID Temperature Controllers For Espresso Machines - 09/08/2007TomNo ratings yet
- Temperature Controller Catalog - EngDocument9 pagesTemperature Controller Catalog - EngJuan Gervacio OrtegaNo ratings yet
- Instruction Manual Multichannel Temperature ControllerDocument4 pagesInstruction Manual Multichannel Temperature ControllerijaNo ratings yet
- Control de TemperaturaDocument7 pagesControl de TemperaturaEmmanuel ZavaletaNo ratings yet
- TET612 ManualDocument7 pagesTET612 ManualDaniel HunterNo ratings yet
- VD Manual 061118Document2 pagesVD Manual 061118leomedalloNo ratings yet
- N2006P PID Installation & WiringDocument8 pagesN2006P PID Installation & WiringFarlepNo ratings yet
- Transmisor de Temperatura Omegaette TXDIN70Document8 pagesTransmisor de Temperatura Omegaette TXDIN70Josue ConstenlaNo ratings yet
- DH Series Incubator Manual Page 8-9Document2 pagesDH Series Incubator Manual Page 8-9adam1No ratings yet
- TC544 244 344Document2 pagesTC544 244 344kiranas1990No ratings yet
- Tense DT-Y DT AX en PDFDocument4 pagesTense DT-Y DT AX en PDFAmri ChakerNo ratings yet
- KCM 91 2wrsDocument6 pagesKCM 91 2wrsayman saifNo ratings yet
- XMT-5000 .CHIN 온도계Document4 pagesXMT-5000 .CHIN 온도계Nather Alusofy0% (1)
- Temperature Controller E5C2Document6 pagesTemperature Controller E5C2MuhammadNo ratings yet
- Multispan TC-19Document4 pagesMultispan TC-19Karan SolankiNo ratings yet
- XMTG818 (T) Temperaturecontrollerwithtimer 14315713197 PDFDocument6 pagesXMTG818 (T) Temperaturecontrollerwithtimer 14315713197 PDFyesdanNo ratings yet
- DeltaDocument13 pagesDeltaNguyễn Minh CườngNo ratings yet
- Medidas Eroelectronic PDFDocument4 pagesMedidas Eroelectronic PDFJuan Diego CondeNo ratings yet
- Digital Indicating Controller: Db1000 SeriesDocument8 pagesDigital Indicating Controller: Db1000 SeriesChoirul MutamamNo ratings yet
- Omron E5cj-Q2hb DatasheetDocument6 pagesOmron E5cj-Q2hb Datasheet王俊發100% (1)
- Ai-208 V7.6Document7 pagesAi-208 V7.6Anonymous h2rz52No ratings yet
- LDS ControllerDocument4 pagesLDS ControllerThiago MendesNo ratings yet
- Ekc202ABC InstructionsDocument12 pagesEkc202ABC InstructionsJuan Carlos SepúlvedaNo ratings yet
- Economic Temperature Controllers Dtc324a 2Document2 pagesEconomic Temperature Controllers Dtc324a 2Roshan MirajeNo ratings yet
- Tense DT-96EM DT-72EM DT-48EM enDocument4 pagesTense DT-96EM DT-72EM DT-48EM enavocelNo ratings yet
- RKC CD 101 PDFDocument9 pagesRKC CD 101 PDFFIRMANSYAHNo ratings yet
- TC544 TC244 TC344 PDFDocument3 pagesTC544 TC244 TC344 PDFGaurav AgrawalNo ratings yet
- TIM-94N / TIM-94N-B / TIM-94N-BN: DescriptionDocument5 pagesTIM-94N / TIM-94N-B / TIM-94N-BN: Descriptionluat1983No ratings yet
- DTB48 TempController Manual1 3 06 PDFDocument13 pagesDTB48 TempController Manual1 3 06 PDFKevin Borbor100% (1)
- Tim 94 4CHDocument3 pagesTim 94 4CHluat1983No ratings yet
- Delta DTD-User-Manual PDFDocument7 pagesDelta DTD-User-Manual PDFlin2m3100% (1)
- ManualDocument2 pagesManualAndreea Maya67% (3)
- Uputstvo PMGDocument4 pagesUputstvo PMGZoka MarinkovićNo ratings yet
- EM 231 TC 8AI eDocument4 pagesEM 231 TC 8AI eJaime Saldias0% (1)
- 1049 tc544cDocument6 pages1049 tc544cThủy NguyễnNo ratings yet
- Digital Temperature ControllerDocument2 pagesDigital Temperature ControllerKunjan DabhiNo ratings yet
- Syl 151Document4 pagesSyl 151Boris KozjanNo ratings yet
- KLT11D en User-ManualDocument2 pagesKLT11D en User-ManualConstantin virgil RusuNo ratings yet
- Operating Manual: Technical Specification Technical SpecificationDocument4 pagesOperating Manual: Technical Specification Technical SpecificationKaran Solanki100% (1)
- Rex CenturyDocument5 pagesRex Centurypite3No ratings yet
- ETC100Document3 pagesETC100Arief KrisbiantoroNo ratings yet
- Oim Ai 7X82DDocument10 pagesOim Ai 7X82Ddeepesh1011No ratings yet
- PD9001Document13 pagesPD9001Sher BahadarNo ratings yet
- ttm-000 eDocument6 pagesttm-000 eMaitry ShahNo ratings yet
- XMT-JK8 enDocument4 pagesXMT-JK8 enhicham boutoucheNo ratings yet
- Process Indicators: Ordering InformationDocument3 pagesProcess Indicators: Ordering InformationRajesh KumarNo ratings yet
- St8 Series Intelligent Temperature Sensor Specialties Digit Display Meter 1. PanelDocument3 pagesSt8 Series Intelligent Temperature Sensor Specialties Digit Display Meter 1. PanelmafetaroNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Design of Electrical Circuits using Engineering Software ToolsFrom EverandDesign of Electrical Circuits using Engineering Software ToolsNo ratings yet
- 1180 50-890-006 Electronic Depth Micrometer PDFDocument3 pages1180 50-890-006 Electronic Depth Micrometer PDFEvTech PhilNo ratings yet
- 217-220425_01_002 MArshall STOCKWELL IIDocument11 pages217-220425_01_002 MArshall STOCKWELL IIEvTech PhilNo ratings yet
- qcc30xx-series-product-briefDocument2 pagesqcc30xx-series-product-briefEvTech PhilNo ratings yet
- thump18sDocument50 pagesthump18sEvTech PhilNo ratings yet
- Bolt-60Document1 pageBolt-60EvTech PhilNo ratings yet
- Mackie_THUMP-18S SchematicDocument3 pagesMackie_THUMP-18S SchematicEvTech PhilNo ratings yet
- Pmr4Set - PMR Transmitter/Receiver SetDocument19 pagesPmr4Set - PMR Transmitter/Receiver SetEvTech PhilNo ratings yet
- A123 GuidelinesDocument4 pagesA123 GuidelinesEvTech PhilNo ratings yet
- Construction GuidelinesDocument8 pagesConstruction GuidelinesEvTech PhilNo ratings yet
- The Epoxy BookDocument37 pagesThe Epoxy BookEvTech PhilNo ratings yet
- Remy Hybrid Application Manual Rev 2.0Document28 pagesRemy Hybrid Application Manual Rev 2.0EvTech PhilNo ratings yet
- Ahug-Ayv8vj R0 enDocument30 pagesAhug-Ayv8vj R0 enAmerico AndresNo ratings yet
- Electronic Speed Switch For Diesel/Gas Engines: ECU® - SS18Document2 pagesElectronic Speed Switch For Diesel/Gas Engines: ECU® - SS18Anas BasarahNo ratings yet
- ACSINDO - Plastic Bottles & Jars CatalogueDocument31 pagesACSINDO - Plastic Bottles & Jars Cataloguerakhalazuardi08No ratings yet
- Haas 96-0315P Rotary Tailstock Operators ManualDocument105 pagesHaas 96-0315P Rotary Tailstock Operators ManualKen Dizzeru100% (1)
- Grundfosliterature 5943391Document64 pagesGrundfosliterature 5943391Natalja KalarashNo ratings yet
- FDARC X-Phase QRM Eliminator: RelayDocument4 pagesFDARC X-Phase QRM Eliminator: RelayЃорѓи Поп-ЃорѓиевNo ratings yet
- 16.1 Clivet-2003-2C2006 CKS CKZ CKDXDocument27 pages16.1 Clivet-2003-2C2006 CKS CKZ CKDXremigius yudhiNo ratings yet
- Manual Air ConditioningDocument23 pagesManual Air ConditioningIlhami DemirNo ratings yet
- Mec623 Scotch Yoke Technical ReportDocument39 pagesMec623 Scotch Yoke Technical ReportAhmad AfieszNo ratings yet
- Uses of MeggerDocument5 pagesUses of MeggerSneha chauhanNo ratings yet
- Notice: Motor Vehicle Safety Standards: Exemption Petitions, Etc.— General Motors Corp.Document2 pagesNotice: Motor Vehicle Safety Standards: Exemption Petitions, Etc.— General Motors Corp.Justia.comNo ratings yet
- Bitoron - 12 - 2016Document20 pagesBitoron - 12 - 2016Md.SafwanNo ratings yet
- Instruction Manual: Qk-10 El-Control BoxDocument9 pagesInstruction Manual: Qk-10 El-Control BoxPhú ĐoànNo ratings yet
- Dayton Arbor Presses Owners ManualDocument8 pagesDayton Arbor Presses Owners ManualBryan AceroNo ratings yet
- Minimum Standard Rollover Protection Device - 13.10Document12 pagesMinimum Standard Rollover Protection Device - 13.10TSP HSENo ratings yet
- CDAQ and M Series Under The HoodDocument44 pagesCDAQ and M Series Under The HoodCataNo ratings yet
- DD6SP50 eDocument488 pagesDD6SP50 eAhmedmahNo ratings yet
- Honeywell V4043H Motorised Zone ValveDocument2 pagesHoneywell V4043H Motorised Zone Valvetfs2006No ratings yet
- OPGW & Hardware Quantity ScheduleDocument3 pagesOPGW & Hardware Quantity ScheduleN-Tech PowerNo ratings yet
- Hermetic Compressor PDFDocument17 pagesHermetic Compressor PDFchildey100% (1)
- TMX53DC 1607 121 (Drawings Electric)Document13 pagesTMX53DC 1607 121 (Drawings Electric)ChristianNo ratings yet
- CNY17GDocument8 pagesCNY17GBrzata PticaNo ratings yet
- Harley Davidson MasterCamSpecsDocument11 pagesHarley Davidson MasterCamSpecsRandallBergerudNo ratings yet
- Re - 1973-11Document100 pagesRe - 1973-11Anonymous kdqf49qbNo ratings yet
- Service Tips Chassis Icc9Document15 pagesService Tips Chassis Icc9Zeko MekoNo ratings yet
- Fh64t6a GBR EngDocument7 pagesFh64t6a GBR EngarfanilyasNo ratings yet