0% found this document useful (0 votes)
34 viewsLecture # 13 (Analytic Functions and Applications)
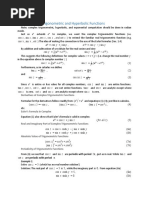
This document discusses analytic functions and their properties. It defines analytic functions and introduces the Cauchy-Riemann equations, which are necessary and sufficient conditions for a function to be analytic. The document also discusses harmonic functions, harmonic conjugates, and using level curves to visualize and sketch functions.
Uploaded by
Rano Mal Rano malCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
34 viewsLecture # 13 (Analytic Functions and Applications)
This document discusses analytic functions and their properties. It defines analytic functions and introduces the Cauchy-Riemann equations, which are necessary and sufficient conditions for a function to be analytic. The document also discusses harmonic functions, harmonic conjugates, and using level curves to visualize and sketch functions.
Uploaded by
Rano Mal Rano malCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 49