0% found this document useful (0 votes)
67 viewsBlock Diagram Reduction Techniques
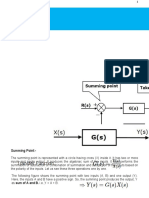
The slides are about , how system is represented using block diagram. The block diagram reduction rules are presented to know how a comples system block diagram can be reduced to a simlest form. The various elements of the block diagram are illustrated with details.
Uploaded by
vaishsanCopyright
© © All Rights Reserved
0% found this document useful (0 votes)
67 viewsBlock Diagram Reduction Techniques
The slides are about , how system is represented using block diagram. The block diagram reduction rules are presented to know how a comples system block diagram can be reduced to a simlest form. The various elements of the block diagram are illustrated with details.
Uploaded by
vaishsanCopyright
© © All Rights Reserved
/ 22