0% found this document useful (0 votes)
107 viewsAc Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUO
The document discusses AC electrical machines including generators and motors. It provides details on:
- The components and operating principle of AC generators, which convert mechanical energy to electrical energy.
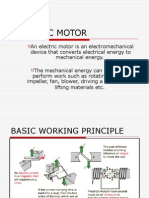
- The main components of AC motors including the stator and rotor, and how they operate by converting electrical energy to mechanical motion.
- The three main types of AC motors: series, synchronous, and induction motors, and some of their characteristics. Induction motors are the most commonly used.
- Additional concepts like synchronous speed, slip, and rotor frequency which are important for understanding AC motor operation.
Uploaded by
Muhd AkmalCopyright
© Attribution Non-Commercial (BY-NC)
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
107 viewsAc Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUO
The document discusses AC electrical machines including generators and motors. It provides details on:
- The components and operating principle of AC generators, which convert mechanical energy to electrical energy.
- The main components of AC motors including the stator and rotor, and how they operate by converting electrical energy to mechanical motion.
- The three main types of AC motors: series, synchronous, and induction motors, and some of their characteristics. Induction motors are the most commonly used.
- Additional concepts like synchronous speed, slip, and rotor frequency which are important for understanding AC motor operation.
Uploaded by
Muhd AkmalCopyright
© Attribution Non-Commercial (BY-NC)
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd
/ 21