Résumé Algèbre I
Résumé Algèbre I
ALGBRE LINAIRE 51
9. Algbre linaire 9. Algbre linaire
9.1. Espaces vectoriels
Remarques
Un ensemble muni de
l'addition et vrifiant les
proprits i, ii, iii, iv est
appel un groupe commutatif
(ou groupe ablien).
Les lments d'un espace
vectoriel sont appels
vecteurs.
Dans v. interviennent deux
sortes de multiplication, dans
(), le signe ! reprsente
la multiplication dans , les
trois autres reprsentent la loi
externe. Dornavant, comme
dans les rels, nous n'crirons
plus le signe !, il sera
sous"entendu.
#n appelle espace vectoriel rel tout ensemble E () muni de deux lois de
composition $
1) une loi de composition interne (note % !), &ui, ' tout couple (x ( y) de EE, fait
correspondre un lment not x + y E, et vrifie les proprits suivantes pour
tout x, y, z E $
i. % est associative $ x % (y % z) ) (x % y) % z (
ii. % est commutative $ x % y ) y % x (
iii. il existe un lment neutre not n E tel &ue $
x + n = x
n + x = x
iv. c*a&ue lment x E poss+de un s,mtri&ue x E tel &ue $
x + x = n
x + x = n
(
2) une loi de composition externe (not !), &ui ' tout couple ( ( x) E fait
correspondre x E, et vrifie les proprits suivantes pour tout ! et
pour tout x! y E $
v. (x) " ()x
vi. 1x ) x
vii. (x + y) ) x + y
viii. ( + )x ) x + x
Exemples d'espaces
vectoriels
-ous aure. remar&u &ue ce
&u'on appelle ici vecteur n'est
pas forcment un vecteur tel &ue
nous l'entendions auparavant.
a. E )
2
) ensemble des paires de nombres rels
/ddition $ (x
1
( y
1
) % (x
0
( y
0
) ) (x
1
+ x
0
( y
1
+ y
0
)
1ultiplication par un scalaire $ (x ( y) ) ( x ( y)
2eutre $ (3 ( 3)
b. E ) ensemble des pol,n4mes ' une variable de degr 0.
/ddition $ (ax
0
% bx % c) + (a'x
0
% b'x % c) ) (a%a')x
0
+ (b% b')x + (c%c')
1ultiplication par un scalaire $ (ax
0
+ bx % c) ) ( a)x
0
+ ( b)x % ( c)
2eutre $ 3x
0
+ 3x + 3 ) 3
ous!espace vectoriel 5oit E un espace vectoriel et # un sous"ensemble de E. #n dit &ue # est un sous!
espace vectoriel de E si # est aussi un espace vectoriel. /utrement dit, il faut &ue $
1) pour tout x! y #, la somme x + y #,
0) pour tout x # et ! le produit x #$
Exemple E )
0
! # ) 6(x ( 3) % x 7 avec les oprations donnes dans l'exemple a. ci"
dessus.
5i (x ( 3), (x ( 3) #, alors (x ( 3) % (x ( 3) ) (x % x ( 3) # .
5i (x ( 3) # et , alors (x ( 3) " ( x ( 3) #.
Exercice 9.1
a. 5oit l'ensemble E
&
" 6(x ( y)
2
8 x % y ) &7.
E
&
est"il un espace vectoriel pour
1. & ) 5
2. & ) 3 9
D1 : L;< : 033= ;a*ier /lg+bre
50 '(A)I*RE +
b. Dans l'ensemble
2
, on consid+re les deux lois de composition dfinies par $
(x ( y) % (x' ( y') ) (x % x' ( y % y')
(x ( y) ) ( x ( y)
1ontre. &ue
2
muni de ces deux lois n'est pas un espace vectoriel.
c. Les ensembles suivants sont"ils des sous"ensembles vectoriels de
>
9
A ) 6(x ( y ( z) 8 y ) >x7 B ) 6(x ( y ( z) 8 0x % y % z ) 017
9.2. "ase et dimension d'un espace vectoriel
#n peut donner une autre
formulation ' la dfinition d'une
base $
#n dit &ue B est une base de E si
et seulement si tout vecteur de E
peut s'crire de mani+re uni,ue
comme combinaison linaire des
vecteurs de B$
5oit - ) 6e
1
( e
0
( ? ( e
&
7 un s,st+me de & vecteurs d'un espace vectoriel E. #n
appelle combinaison linaire des & vecteurs de ce s,st+me tout vecteur de la forme $
1
e
1
+
0
e
0
+ . +
&
e
&
o@
1
!
0
! .
&
5oient e
1
/ e
0
( ? ( e
&
& vecteurs d'un espace vectoriel E. #n dit &u'ils sont linai!
rement indpendants si la seule solution de l'&uation
0
e
0
+
1
e
1
+ . +
&
e
&
) 3
est
1
)
0
) ? )
&
) 3.
Les
i
sont appels coe##icients de la combinaison linaire.
5oit B ) 6e
1
( e
0
( ?( e
n
7 un s,st+me de n vecteurs d'un espace vectoriel E. #n dit &ue
B est une ba2e de E si et seulement si $
1) tout lment de E est une combinaison linaire du s,st+me B ;
2) les vecteurs e
1
( e
0
( ? ( e
n
sont linairement indpendants.
Aoutes les bases d'un espace vectoriel donn ont le mBme nombre d'lments. #n
appelle dimension d'un espace vectoriel E le nombre d'lments d'une base de E, on
note dim$E).
#n appelle base canonique de l'espace vectoriel
0
la base e
1
(1 ( 3), e
0
(3 ( 1).
#n appelle base canonique de l'espace vectoriel
>
la base e
1
(1 ( 3 ( 3), e
0
(3 ( 1 ( 3),
e
>
(3 ( 3 ( 1).
Exercice 9.2
1ontre. &ue, dans l'espace des fonctions affines, e
1
(x) ) 1 et e
0
(x) ) x forment une
base.
Donne. une autre base dans cet espace.
9.%. Applications linaires
5oient E et # deux espaces vectoriels. #n appelle application linaire de E vers #
toute application 3 de E vers # telle &ue $
1) 3(u + 4) " 3(u) % 3(4) et 2) 3(u5 ) 3(u)
&uels &ue soient les lments u et 4 de E et le nombre rel .
Exemple
E ) # ) IR , 3 $ - et 3(x) ) 5x.
3(u + 4) ) 5(u + 4) ) 5u + 54 ) 3(u) + 3(4)
3(u) ) 5(u) ) (5u) ) 3(u)
&#initions Une application linaire de E vers # est galement appele 'omomorp'isme de E vers
#$
Une application linaire de E vers E est appele endomorp'isme de E$
Une application linaire biCective de E vers # est appele isomorp'isme de E vers #$
Un isomorp*isme de E vers E est appel automorp'isme de E$
;a*ier /lg+bre D1 : L;< " 033=
ALGBRE LINAIRE 5>
Exercice 9.%
Les applications 3 de E vers # ci"dessous sont"elles linaires 9
a. 3(x) ) 0x b. 3(x) ) x % 0
c. 3(x) ) x
0
d. 3((x ( y)) ) >x : y
e. 3((x ( y)) ) xy #. 3((x ( y)) ) (0x 6 y ( x)
g. 3((x ( y)) " (3 ( %y%) '. 3((x ( y)) ) (sin(x) ( y)
i. 3((x ( y)) " (x ( y ( x 6 y) (. 3((x / y ( z)) ) (x % 0y / z : 0y)
). 3(ax % b) ) 5a % 0b l. 3(ax
1
% bx % c) ) cx
0
% bx % a
m. 3(f) ) f (drive de f)
*prations sur les
applications linaires
5i f et g sont des applications linaires, alors les applications f+g et 7f
( ) sont aussi linaires.
5oit E! # et G des espaces vectoriels, f une application linaire de E vers # et g une
application linaire de # vers G.
L'application g f est alors linaire de E vers G. Dn effet $
( g f )( u+4)=g ( f (u+4 ))=g ( f (u)+ f (4 ))=g ( f (u))+g( f (4 ))
)
( g f )( u)+( g f )( 4)
( g f )(\u)=g( f (\u))=g (\ f (u))=\ g ( f (u))=\( g f )(u)
La multiplication de deux fonctions linaires n'est pas forcment linaire $
(fg)(u % 4) ) f(u % 4)g(u % 4) ) (f(u) % f(4)) (g(u) % g(4)) )
f(u)g(u) % f(u)g(4) % f(4)g(u) % f(4)g(4) ) (fg)(u) + (fg)(4) % f(u)g(4) % f(4)g(u)
Donc, en gnral, (fg)(u % 4) (fg)(u) + (fg)(4)
9.+. ,o-au et image d'une application linaire
,o-au 5oit 3 une application linaire de E vers #. #n appelle no-au de 3, not .er(h),
l'ensemble des vecteurs de E &ui ont pour image, par 3, le vecteur nul de #$
Eer(3) ) 6u E % 3(u) " 8
#
7
/mage
Remarques
5oit 3 une application linaire de E vers #. #n appelle image de 3, not /m(h),
l'ensemble des vecteurs de # &ui sont image, par 3 d'au moins un vecteur de E.
Fm(3) ) 64 # % un u E tel &ue 39u5 " 47
#n appelle rang d'une application linaire de E vers # la dimension de Fm(3).
Eer(3) et Fm(3) ne sont Camais vides.
Eer(3) est un sous"espace vectoriel de E. Fm(3) est un sous"espace vectoriel de #.
0'orme 9.1 5oient E et # deux espaces vectoriels, avec E de dimension finie. 5oit 3 une
application linaire de E vers #. /lors $
dim(Eer(3)) % dim(Fm(3)) ) dim(E)
Exercice 9.+
Donne. le no,au et l'image des applications linaires suivantes $
a. 3((x ( y)) ) (0x 6 y ( x) b. 3((x ( y)) ) (x 6 y ( 3)
c. 3((x ( y)) ) ( x ( y ( x 6 y) d. 3((x ( y)) " (x 6 y ( y 6 x)
e. 3((x ( y)) ) (3 ( y ( x + 0y) #. 3((x ( y ( z)) ) (x + 0y ( z 6 0y)
g. 3((x ( y ( z)) ) (z ( y ( x) '. 3(f) " f
D1 : L;< : 033= ;a*ier /lg+bre
5G '(A)I*RE +
9.1. 2atrices
#n appelle matrice de t-pe m n! avec m et n entiers strictement positifs, un
ensemble de nombres rels disposs dans un tableau rectangulaire ' m lignes et n
colonnes.
A =
(
a
11
a
1n
a
m1
. a
mn
)
Les nombres a
i:
(i $ numro de la ligne, : $ numro de la colonne) situs dans le tableau
sont appels les coe##icients.
Huand aucune confusion n'est possible concernant le nombre de lignes et de colonnes
de la matrice A, on note A ) (a
i:
).
L'ensemble des matrices de t,pe m n ' coefficients rels se note ;
mn
. #n note ;
n
l'ensemble de toutes les matrices carres ' coefficients rels possdant n lignes et n
colonnes.
omme de deux matrices 5oit A ) (a
i:
) et B ) (b
i:
) deux matrices de dimensions m n. #n appelle somme de A
et B la matrice de t,pe m n dfinie par A + B " (a
i:
% b
i:
).
(
1 1 0
0 6 1 >
)
+
(
3 6 1 1
I 5 6 5
)
=
(
1 3 >
J G 6 0
)
Kemar&ue. &u'il faut &ue les matrices soient de mBmes dimensions.
2ultiplication par un
scalaire
5oit A ) (a
i:
) une matrice de dimensions m n et $ #n appelle produit de la
matrice A et de la matrice A ) (a
i:
).
5
(
1 1 0
0 6 1 >
)
=
(
5 5 13
13 6 5 15
)
3roduit de deux matrices
ci& est le produit scalaire de la
i<+me ligne avec la &<+me
colonne.
5oit A ) (a
i:
) une matrice de t,pe m n et B ) (b
:&
) une matrice de dimensions n r. Le
produit de A par B, not AB, est la matrice ' ) (c
i&
) de dimensions m r avec $
c
i&
=
: =1
n
a
i :
b
: &
=a
i 1
b
1&
+a
i 0
b
0&
+.+a
i n
b
n&
(
0 5
I G
)
(
1 1 0
0 6 1 >
)
=
(
10 6 > 1J
15 > 0L
)
<our effectuer le produit ' " AB, il faut &ue le nombre de colonnes de A soit gal au
nombre de lignes de B. La matrice ' a le mBme nombre de lignes &ue A et le mBme
nombre de colonnes &ue B.
Attention 4
Le produit de deux matrices n'est pas commutati#. Dn gnral, ABBA .
5i AB " A', il n'est pas vrai en gnral &ue B " '.
5i AB ) 3, on ne peut pas conclure en gnral &ue &ue A ) 3 ou B ) 3.
Exercice 9.1
5oient les matrices A =
(
1 G
> 6 0
)
, B =
(
1 1 0
0 6 1 >
)
, ' =
(
6 1 3
0 1
6 0 0
)
;alcule. les produits suivants $ AB, 'A, B', 'B, A
0
.
;a*ier /lg+bre D1 : L;< " 033=
ALGBRE LINAIRE 55
Elvation 5 une
puissance
Fl n'existe pas de formule pour lever une matrice carre ' une puissance. Le seul
mo,en est de calculer A
n
=AA.A
_
n termes
.
0ransposition 5i A ) (a
i:
) est une matrice m n, on appelle transpose de A et on note
t
A la matrice
dont la i<+me ligne est la i<+me colonne de A et la :<+me colonne est la :<+me ligne de A
(on permute ligne et colonne).
La matrice
t
A ) (a
i:
) est donc une matrice n m et a
i:
) a
:i
.
A )
(
1 1 0
0 6 1 >
)
,
t
A )
(
1 0
1 6 1
0 >
)
t
(AB) "
t
B
t
A
3roprits
;'est la matrice nulle. Aous les
coefficients sont nuls.
;'est la matrice identit, &ue l'on
dsigne touCours par la lettre I.
Les coefficients de la diagonale
valent 1, les autres sont nuls.
La matrice identit est un
exemple de matrice diagonale.
L'ensemble des matrices m n muni de l'addition et de la multiplication par un scalaire
est un espace vectoriel de dimension mn. Le neutre de la multiplication est donn par
la matrice carre $
(
3 3
3 . 3
)
L'ensemble des matrices n n muni de l'addition est un groupe commutatif.
Dans cet ensemble, le neutre du produit est $ I
n
"
(
1 3
3 . 1
)
.
Dans cet ensemble, la multiplication est distributive sur l'addition.
#n appelle matrice diagonale une matrice carre o@ tous les coefficients &ui ne sont
pas sur la diagonale sont nuls.
/nverse d'une matrice
Exemple
Exemple
Exemple
Une matrice carre A! d'ordre n, est dite inversible, s'il existe une matrice carre B,
d'ordre n, telle &ue $
AB ) BA ) I
n
La matrice B est alors appele matrice inverse de la matrice A, elle est note A
"1
.
5oit A ) (a
i:
) une matrice carre d'ordre n. #n appelle mineur de a
i:
, le dterminant =
i:
de la matrice carre A
i:
d'ordre n:1 obtenue en supprimant la i<+me ligne et la :<+me
colonne de la matrice A.
5oit A)
(
1 0 6 1
> 1 >
6 0 3 1
)
. Le mineur de a
10
(0) vaut =
10
"
> >
6 0 1
=J .
#n appelle co#acteur de l'lment a
i:
le nombre (:1)
i+:
=
i:
.
Le cofacteur de a
10
vaut (1)
1%0
J ) J.
La comatrice ' d'une matrice carre A d'ordre n, est la matrice obtenue en remplaMant
c*a&ue lment a
i:
de la matrice A par son cofacteur.
La comatrice de A )
1 0 1
> 1 >
0 3 1
est ' )
1 J 0
0 1 G
I L 5
.
D1 : L;< : 033= ;a*ier /lg+bre
5L '(A)I*RE +
Exemple
5oit A une matrice carre telle &ue Dt(A) 3. /lors $ A
61
=
1
Dt ( A)
'
t
1
1 0 I 1 0 I
1 1
J 1 L J 1 L
1J 1J
0 G 5 0 G 5
A
= =
/nverse d'une matrice
carre d'ordre 2
5oit A "
(
a b
c >
)
, avec Dt(A) " a> : bc 3.
La comatrice est
(
> c
b a
)
, sa transpose est
(
> b
c a
)
.
La matrice inverse de A "
(
a b
c >
)
est donc A
61
=
1
a> 6 bc
(
> 6 b
6 c a
)
.
Autre mt'ode pour
calculer l'inverse d'une
matrice
#n a suppos &ue A tait
inversible.
La formule prcdente marc*e bien pour des matrices de rang infrieur ' G. /u"del', il
est prfrable d'utiliser la trans#ormation de 6auss!7ordan 8
Normer la matrice ( ) A I
et effectuer sur les lignes de cette matrice augmente les
oprations lmentaires mettant A dans la forme c*elonne rduite. #n obtient ainsi la
matrice
( )
1
I A
.
<ar oprations lmentaires, on entend multiplication d'une ligne par un scalaire
diffrent de 3, combinaison linaire de deux lignes, permutation de deux lignes.
Exemple de calcul ;*erc*ons la matrice inverse de A=
(
1 0 >
0 5 >
1 3 =
)
.
0 1
> 1
1 0 > 1 3 3
0 5 > 3 1 3 0
1 3 = 3 3 1
l l
l l
> 0
1 0 > 1 3 3
3 1 > 0 1 3
3 0 5 1 3 1 0
+
l l
;amille 7ordan
(1=>= " 1J00)
>
1 0 > 1 3 3
3 1 > 0 1 3
3 3 1 5 0 1
l
1 >
0 >
1 0 > 1 3 3 >
3 1 > 0 1 3 >
3 3 1 5 0 1
+
l l
l l
1 0
1 0 3 1G L > 0
3 1 3 1> 5 >
3 3 1 5 0 1
l l 1 3 3 G3 1L J
3 1 3 1> 5 >
3 3 1 5 0 1
#n a donc A
61
=
(
6 G3 1L J
1> 6 5 6 >
5 6 0 6 1
)
.
Exercice 9.9
Dtermine. les inverses des matrices suivantes $
G 0
J 5
A
=
> 0 1
1 L >
0 G 3
B
=
1 G 0
1 3 0
1 0 1
'
=
;a*ier /lg+bre D1 : L;< " 033=
ALGBRE LINAIRE 5I
0'orme 9.2 5oit A une matrice carre. A est inversible si et seulement si Det(A) 3.
5oit A une matrice carre inversible, alors Dt ( A
61
)=
1
Dt ( A)
.
5oit A et B deux matrices carre inversibles de mBme ordre, alors AB est inversible et
(AB)
"1
" B
"1
A
"1
$attention 5 l'ordre).
5oit A une matrice carre inversible.
t
A est inversible et (
t
A)
"1
"
t
(A
<1
).
9.9. 2atrices et applications linaires
<our le vrifier, calcule. le
membre de droite de l'&uation O
Fl est temps de faire le lien entre les applications linaires et les matrices. -oici un
s,st+me d'&uations linaires $
x = a
1
x + a
0
y + a
>
z
y = b
1
x + b
0
y + b
>
z
;e s,st+me peut aussi Btre crit de la faMon suivante $
(
x
y
)
_
4
=
(
a
1
a
0
a
>
b
1
b
0
b
>
)
_
;
(
x
y
z
)
_
4
<our obtenir l'image de 4 # d'un lment 4 E par une application linaire 3, on
peut donc simplement effectuer le produit matriciel de la matrice associe ' 3 avec le
vecteur 4.
4 ) 3(4) ) ;4
Exercice 9.:
5oit l'application linaire 3 de
0
vers
0
, de matrice ; =
(
1 6 0
0 1
)
.
5oient les vecteurs u=
(
5
>
)
, 4 =
(
1
0
)
.
;alcule. 3(u)! 3(4), 3(u + 4), 3(0u)! 3(>4), 3(0u 6 >4).
Exercice 9.;
Dtermine. les matrices des applications linaires de l'exercice J.G.
Exercice 9.9
Dtermine. la nature gomtri&ue des applications linaires suivantes $
;
1
=
(
> 3
3 >
)
, ;
0
=
(
> 3
3 1
)
, ;
>
=
(
1 3 3
3 6 1 3
3 3 1
)
, ;
G
=
(
0 3 3
3 0 3
)
Exercice 9.1<
Donne., pour c*a&ue application linaire du plan ()) dans le plan ()), la matrice de 3.
a. 5,mtrie d'axe ?x. b. 5,mtrie d'axe ?y.
c. 5,mtrie d'axe y " x. d. 5,mtrie d'axe y " 6x.
e. <roCection ort*ogonale sur ?x$ #. <roCection ort*ogonale sur ?y$
g. Pomot*tie de centre ? et de rapport 0. '. Kotation de centre ? et d'angle :J3@.
i. Kotation de centre ? et d'angle %1=3Q . (. Kotation de centre ? et d'angle %>3Q.
). Kotation de centre ? et d'angle . l. ;isaillement $ (x ( y) (x + &y ( y).
D1 : L;< : 033= ;a*ier /lg+bre
5= '(A)I*RE +
Exercice 9.11
5oit l'application linaire 3 $
0
0
de matrice ; =
(
1 6 0
0 1
)
et u =
(
G
1
)
.
a. Dtermine. le vecteur 4 &ui est image de u.
b. Dtermine. le vecteur A &ui a pour image u.
Exercice 9.12
Dtermine. les matrices des endomorp*ismes de
0
suivants $
a. 3(u) ) >u b. 3(u) ) 6u c. 3(u) ) xe
1
d. 3(u) ) u : >xe
0
Exercice 9.1%
Dtermine. les endomorp*ismes de
>
suivants $
a. 3(u) ) >u b. 3(u) ) (x % 0y % Gz / 6x 6 0y 6 0z / z) c. 3(u) " ye
1
6 xe
0
Exercice 9.1+
5oit l'application linaire 3 de
0
vers
0
telle &ue
3(( 0 ( 1)) = (0 ( >)
3((1( 6 1)) = (> ( 1)
.
Dtermine. la matrice de 3.
Exercice 9.11
Un point u est fixe si u)3(u).
5oit l'endomorp*isme 3 de
0
de matrice ;=
(
1
0
6
1
0
6
1
0
1
0
)
a. Dtermine. l'image, par 3, de la droite > $ x : y % G ) 3.
b. Dtermine. l'image, par 3, de la droite g $ x : 0y ) 3.
c. Dtermine. les points fixes de 3.
d. Dtermine. la nature gomtri&ue de 3.
2atrice associe 5 une
application linaire
compose
2ous avons vu &ue la composition de deux applications linaires est galement une
application linaire.
5oit ;
1
la matrice associe ' l'application linaire 3
1
de E vers # et ;
0
la matrice
associe ' l'application linaire de # vers G.
;*erc*ons la matrice ; associe ' l'application linaire de 3=3
0
3
1
de E vers G.
2ous savons &ue $
3(u) ) ;u
3(u) ) ( 3
0
3
1
)(u) ) 3
0
(3
1
(u)) ) 3
0
(;
1
u) ) ;
0
(;
1
u)
;omme le produit matriciel est associatif, on dduit $ 3(u) ) ;
0
(;
1
u) ) (;
0
;
1
)u
0'orme 9.%
La matrice ; associe ' l'application linaire 3
0
3
1
est gale au produit des matrices
;
0
(de 3
0
) et ;
1
(de 3
1
), dans cet ordre.
; " ;
0
;
1
Exercice 9.19
La rcipro&ue se trouve en
calculant l'inverse de la matrice.
5oient les applications linaires 3
1
et 3
0
respectivement de matrices ;
1
=
(
1 >
0 G
)
et
;
0
=
(
5 I
L =
)
$
a. Dtermine. les matrices des applications linaires 3
B
! 3
C
et 3
D
suivantes $
3
>
=3
1
3
0
3
G
=3
0
3
1
3
5
=3
0
3
0
b. Dtermine. la matrice de la rcipro&ue de 3
B
.
;a*ier /lg+bre D1 : L;< " 033=
ALGBRE LINAIRE 5J
Exercice 9.1:
Dans
>
soit l'endomorp*isme 3 suivant $
3((x ( y ( z)) ) (0y ( Gx6z ( x%y%z).
Dtermine. la matrice de la rcipro&ue de 3.
9.:. ='angement de base
2atrice de c'angement
de base
)remiEre maniEre!
>an2 la ba2e B
;onsidrons un espace vectoriel E de dimension 0, par exemple
0
. 5oient deux bases
de E! B ) (e
1
( e
0
) et B ) (e
1
( e
0
). Dxprimons e
1
et e
0
dans la base B $
e1 ) a7e1 + b7e0
e
1
=
(
a
b
)
e1 " c7e0 + >7e1
e
0
=
(
c
>
)
5oit un vecteur &uelcon&ue 4. Fl peut s'crire de deux mani+res $
4 ) x7e
1
+ y7e
0
) x(a7e
1
+ b7e
0
) + y(c7e
1
+ >7e
0
) ) (x7a + y7c)7e
1
+ (x7b + y7>)7e
0
4 =
(
xa + yc
x b + y >
)
-econ>e maniEre!
>an2 la ba2e B
4 ) x7e
1
+ y7e
0
4 =
(
x
y
)
Fl s'ensuit &ue
(
x
y
)
=
(
xa + yc
x b + y >
)
, &ue l'on peut aussi crire $
(
x
y
)
=
(
a c
b >
)(
x
y
)
.
#n appelle la matrice ) =
(
a c
b >
)
la matrice de c'angement de base.
5oient F la matrice colonne comprenant les composantes de 4 dans la base B (
F la matrice colonne comprenant les composantes de 4 dans la base B.
/vec ces notations, on a $ )F " F, donc F " )
"1
F $
La matrice ) est inversible puis&ue e
1
! e
0
est une base dans
0
.
La mBme dmarc*e est possible pour un espace vectoriel de dimension n. ;onnaissant
les composantes d'un vecteur 4 dans une base B, il faut, pour obtenir les composantes de
4 dans une autre base B $
1. crire la matrice ) dont les colonnes sont les composantes des vecteurs de la nouvelle
base B relativement ' l'ancienne base B
0. calculer la matrice inverse )
"1
>. effectuer le produit matriciel )
"1
F
2atrice d'un
endomorp'isme dans
une nouvelle base
5oit un endomorp*isme 3 de E de matrice ; dans une base B. Dterminons la matrice
; de cet endomorp*isme dans une nouvelle base B de E.
5oit un vecteur &uelcon&ue u de E et son image 4 par l'endomorp*isme 3.
2otons G et F les matrices colonnes des composantes de u et 4 dans la base B$
G et F les matrices colonnes des composantes de u et 4 dans la base B.
) la matrice de c*angement de base B B$
D1 : L;< : 033= ;a*ier /lg+bre
3
3
) )
1
;
;
L3 '(A)I*RE +
; est une matrice diagonale.
<our obtenir l'image par l'endomorp*isme 3 du vecteur u de E dans la base B! on peut,
dans l'ordre $
1. calculer les composantes de u dans la base B $ G
0. calculer les composantes de u dans la base B $ G ) )G
>. calculer les composantes de 3(u) " 4 dans la base B $ F ) ;G ) ;()G)
G. calculer les composantes de 3(u) " 4 dans la base B $ F ) )
1
F ) )
1
(;()G)).
La multiplication matricielle tant associative, on a F ) ()
1
;))G.
;ette image s'obtient galement directement $ F ) ;G.
Dn comparant ces deux galits, on voit &ue $ ; " )
1
;) .
Rase B Rase B
G F " ;G
G F " ;G " ()
1
;))G
Rase B Rase B
Exemple ;onsidrons l'endomorp*isme 3 de matrice
; =
(
1 3
1 6 1
)
dans la base B ) (e
1
( e
0
) et
la base e
1
=
(
0
1
)
, e
0
=
(
3
1
)
.
#n calcule $
) =
(
0 3
1 1
)
)
6 1
=
1
6 0
(
61 3
61 0
)
=
(
1
0
3
1
0
6 1)
; =
(
1
0
3
1
0
6 1)
(
1 3
1 1
)(
0 3
1 1
)
)
(
1
0
3
1
0
61)
(
0 3
1 1
)
)
(
1 3
3 6 1
)
Exercice 9.1;
Dans
0
muni de la base B ) (e
1
( e
0
), on donne l'endomorp*isme 3 de de matrice
1 3
0 >
;
=
df ; =
(
1 3
0 >
)
dans la base B.
5oient les vecteurs u ) (0 ( 1), 4 ) (:1 ( 1), A ) (G ( :>).
5oient les nouvelles bases B
1
" (e
0
( e
1
), B
0
" (e
1
+ e
0
( >e
0
), B
>
" (u
( 4).
a. ;alcule. les composantes des vecteurs u, 4 et A dans c*acune de ces bases.
b. Dtermine. la matrice de l'endomorp*isme 3 relativement ' c*acune de ces bases.
Exercice 9.19
Dans
>
muni de la base B ) (e
1
( e
0
( e
>
), on donne l'endomorp*isme 3 de
>
de
matrice ; =
(
0 > 1
1 6 0 3
6 1 G 3
)
dans la base B.
5oient les vecteurs u ) (1 ( 1 ( 1), 4 ) (1 ( 1 ( 3), A ) (5 ( :0 ( >). 5oient les nouvelles
bases B
1
) (e
>
( e
0
( e
1
), B
0
) (u ( 4 ( e
1
)$
a. ;alcule. les composantes des vecteurs u, 4 et A dans c*acune de ces bases.
b. Dtermine. la matrice de l'endomorp*isme 3 relativement ' c*acune de ces bases.
;a*ier /lg+bre D1 : L;< " 033=
ALGBRE LINAIRE L1
9.;. >aleurs propres et vecteurs propres
Kemar&ue. &ue 3(3) ) 3 est
touCours vrai.
5oit 3 un endomorp*isme d'un espace vectoriel E. est une valeur propre de 3
s'il existe (au moins) un vecteur u 3 de E tel &ue $
3(u) " u
Un tel vecteur u est appel vecteur propre associ ' .
;as particuliers $
En #ait? h agit comme l''omot'tie de rapport sur la droite engendre par u.
) 1 $ identit ) 3 $ proCection ) 1 $ s,mtrie axiale
#n note E
l'ensemble de tous les vecteurs de E tels &ue 3(4) ) 4. Fl s'appelle le sous!
espace propre associ ' . ;'est un sous"espace vectoriel de E.
Exemple
5oit un endomorp*isme de
0
de matrice ; =
(
> 0
1 0
)
.
#n pose la condition 3(u) ) u ;u ) u
(
> 0
1 0
)
(
x
y
)
=\
(
x
y
)
L'ensemble de valeurs propres
d'une matrice carre A est
appel spectre de A.
(
> 0
1 0
)
(
x
y
)
\
(
x
y
)
=
(
3
3
)
(
> 0
1 0
)
(
x
y
)
\
(
1 3
3 1
)
(
x
y
)
=
(
3
3
)
(
> 0
1 0
)
(
x
y
)
(
\ 3
3 \
)
(
x
y
)
=
(
3
3
)
((
> 0
1 0
)
(
\ 3
3 \
))
(
x
y
)
=
(
3
3
)
(
>\ 0
1 0\
)
(
x
y
)
=
(
3
3
)
(> 6 \) x + 0 y = 3
x + (0 6 \) y = 3
;e s,st+me d'&uations admet la solution (3 ( 3) et il ne peut avoir d'autres solutions non
nulles &ue si = ) Det(; 6 I) )
> 6 \ 0
1 0 6 \
) 3.
> 6 \ 0
1 0 6 \
) 3 (> : )(0 : ) : 01 ) 3
0
: 5 % G ) 3
1
) 1,
0
) G.
<our
1
) 1 $
vecteurs propres associs u
1
=
(
x
y
)
tels &ue
0 x + 0 y = 3
x + y = 3
u
1
=
(
x
x
)
.
5ous"espace vectoriel propre $ E
1
" droite d'&uation y ) 6x.
<our
0
) G $
vecteurs propres associs u
0
=
(
x
y
)
tels &ue
x + 0 y = 3
x 0 y = 3
u
1
=
(
x
x
0
)
.
5ous"espace vectoriel propre $ E
0
) droite d'&uation y=
x
0
.
0'orme 9.+ 5i un endomorp*isme 3 admet deux valeurs propres distinctes
1
,
0
et si u
1
, u
0
sont des
vecteurs propres pour respectivement
1
,
0
(c'est"'"dire &ue 3(u
1
) )
1
u
1
et 3(u
0
) )
0
u
0
),
alors u
1
et u
0
sont linairement indpendants.
D1 : L;< : 033= ;a*ier /lg+bre
L0 '(A)I*RE +
0'orme 9.1 Un nombre rel est une valeur propre de 3 de matrice ; Det(; 6 I) ) 3
&monstration
<our simplifier, la
dmonstration est faite dans un
espace ' deux dimensions, le
passage ' n dimensions ne doit
pas poser de probl+me
particulier.
5oit une valeur propre, alors il existe un vecteur
u =
(
a
b
)
non nul tel &ue $
;7u 6 u )
(
3
3
)
,
(; 6 \ I )u =
(
3
3
)
#r, le vecteur de composantes
(
3
3
)
satisfait galement la mBme relation $
;
(
3
3
)
:
(
3
3
)
"
(
3
3
)
, (; 6 I)
(
3
3
)
"
(
3
3
)
.
La fonction reprsente par la matrice ; 6 I n'est donc pas biCective et donc pas
inversible Dt(; 6 I) ) 3.
=alcul des valeurs
propres et des vecteurs
propres
;'est donc en posant Dt(; 6 I) ) 3 &ue l'on trouve les valeurs propres.
<our trouver les vecteurs propres associs ' ces valeurs propres, il faut rsoudre le
s,st+me ;
(
x
y
)
= \
(
x
y
)
.
Dfinition d'une affinit E est l'axe d'affinit.
= est la direction de l'affinit.
a est le point avant d'appli&uer l'affinit.
a est une affinit de rapport 0 par rapport '
l'axe E et de direction =.
a est une affinit de rapport 3 par rapport
' l'axe E et de direction =.
a est une affinit de rapport -1 par
rapport ' l'axe E et de direction =.
E
a
aH
aHH
aHHH
=
2atrice d'un
endomorp'isme dans
une base de vecteurs
propres
Keprenons l'exemple prcdent. 2ous avions trouv $
-aleur propre $
1
) 1 vecteur propre $
u
1
=
(
1
6 1
)
-aleur propre $
0
) G vecteur propre $
u
0
=
(
0
1
)
2ous voulons exprimer la matrice
(
> 0
1 0
)
dans la base (u
1
( u
0
). La matrice de
c*angement de base est $ ) =
(
1 0
61 1
)
, et son inverse $ )
6 1
=
1
>
(
1 6 0
1 1
)
y ) 6x $ droite de vecteur
directeur u1
y=
1
0
x $ droite de vecteur
directeur u0
La nouvelle matrice s'exprime donc $
;")
"1
;)"
1
>
(
1 6 0
1 1
)
(
> 0
1 0
)
(
1 0
6 1 1
)
)
1
>
(
1 6 0
1 1
)
(
1 =
6 1 G
)
)
1
>
(
> 3
3 10
)
)
(
1 3
3 G
)
/insi, par 3, le vecteur
(
x
y
)
a pour image
(
x
G y
)
.
Somtri&uement parlant, 3 est donc une affinit de rapport G dans la direction
(
0
1
)
par
rapport ' l'axe y ) 6x, combine ' une affinit de rapport 1 dans la direction
(
1
6 1
)
par
rapport ' l'axe y=
1
0
x .
;a*ier /lg+bre D1 : L;< " 033=
ALGBRE LINAIRE L>
4 =;4
;=)
_
>.
;
_
0.
)
6 1
_
1.
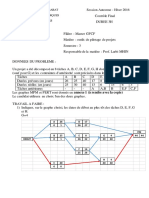
<ar l'endomorp*isme 3, on obtient la transformation suivante $
-1 1 2 3 4 5 6
-3
-2
-1
1
2
3
5 10 15
-2
2
4
6
8
;oncr+tement, c*a&ue point de la fl+c*e a t transform ainsi $
1. #n exprime les coordonnes du point dans la nouvelle base des vecteurs
propres. <ar exemple, le point (>( 1) s'crit
(
1
>
(
G
>
)
dans la base (u
1
, u
0
).
0. #n a multipli la coordonne x par
1
et la coordonne y par
2
.
(
1
>
(
G
>
)
devient
(
1
>
(
1L
>
)
.
>. #n revient dans la base canoni&ue. Les nouvelles coordonnes sont (11( 5).
&#inition Un endomorp*isme 3 de E est diagonalisable s'il existe une base de E relativement '
la&uelle sa matrice est diagonale.
0'orme 9.9 Un endomorp*isme 3 de E est diagonalisable si et seulement s'il existe une base de E
forme de vecteurs propres.
Les valeurs propres i ne sont
pas ncessairement distinctes.
5i elles le sont deux ' deux,
alors 3 est diagonalisable.
5oit un endomorp*isme 3 de E de dimension n a,ant n valeurs propres $
1
,
0
,
>
, ? ,
n
. Dans la base de vecteurs propres, la matrice ; a pour colonnes $
3(u
1
) =
(
\
1
3
3
3
)
, 3(u
0
) =
(
3
\
0
3
3
)
, 3(u
>
) =
(
3
3
\
>
3
)
, ? ,
3(u
n
) =
(
3
3
3
\
n
)
Donc $ ; =
(
\
1
3 3 3 3
3 \
0
3 3 3
3 3 \
>
3 3
3
3 3 \
n
)
;'est une matrice diagonale (a
i:
) 3 pour tout i :) dont les lments de la diagonale
sont les valeurs propres de h.
Exercice 9.2<
5oient les endomorp*ismes suivants de
0
par leur matrice relativement ' une base B$
1.
(
> 6 L
1 6 0
)
2.
(
1 3
0 .> 6 1
)
%.
(
3 0
1
0
3
)
+.
(
> 0
1 0
)
1.
(
> 6 1
3 0
)
9.
(
1 0
1 6 0
)
:.
(
1 >
5 1
)
;.
(
cos(t ) 6 sin(t )
sin(t ) cos(t )
)
D1 : L;< : 033= ;a*ier /lg+bre
LG '(A)I*RE +
a. /vec ces endomorp*ismes, dforme. l'image obtenue en reliant, dans l'ordre, les
points de coordonnes $ (1 ( 1), (> ( 1), (> ( >), (L ( 3), (> ( >), (> ( 1), (3 ( 1),
(3 ( 3), (1 ( 3).
b. Dtermine. les valeurs propres et les vecteurs propres associs pour c*acun des
endomorp*ismes.
c. Lors&ue c'est possible, dtermine. la matrice de c*angement de base permettant de
diagonaliser la matrice de l'endomorp*isme, et donne. la matrice de l'endomor"
p*isme dans la nouvelle base.
d. Dtermine. la nature gomtri&ue de ces endomorp*ismes.
Exercice 9.21
Keprene. les &uestions b"d de l'exercice J.03, mais dans
>
avec $
1.
(
> 6 G 6 0
G 6 I 6 G
5 13 L
)
2.
(
5 6 = 6 G
= 6 15 6 =
6 13 03 11
)
9.9. /somtrie vectorielle
&#inition Un endomorp*isme 3 de E &ui conserve le produit scalaire (ce &ui signifie &ue
3(u)3(4) ) u4 pour tout u, 4 de E) est appel endomorp*isme ort*ogonal ou isomtrie
vectorielle de E.
0'orme 9.: 3 est une isomtrie vectorielle de E
3 conserve la norme $ 3(u)=u
3 transforme toute base ort*onorme de E en une base ort*onorme de E.
2atrice d'une isomtrie
vectorielle
#n appelle matrice ort'ogonale toute matrice carr inversible telle &ue sa matrice
transpose est gale ' sa matrice inverse.
A ort*ogonale A
"1
)
t
A! ou
t
AA ) I.
0'orme 9.; 3 est une isomtrie vectorielle de E si et seulement si la matrice de 3 est ort*ogonale
dans une base ort*onorme de E.
Une isomtrie vectorielle peut avoir uni&uement les valeurs propres %1 ou :1.
#n en dduit &ue le dterminant d'une matrice ort*ogonale est gal ' %1 ou :1.
0'orme 9.9
Fsomtries vectorielles de
l'espace E "
0
Remarques
5oit 3 une isomtrie vectorielle du plan.
3 est une rotation vectorielle du plan le dterminant de la matrice ) % 1.
3 est une s,mtrie ort*ogonale du plan le dterminant de la matrice ) :1.
Les seules rotations vectorielles du plan &ui admettent des valeurs propres sont $
1. l'identit (valeur propre 1)
0. la rotation d'angle (valeur propre :1)
0'orme 9.1< Une isomtrie vectorielle 3 de
>
de dterminant %1 est une rotation autour d'un axe.
L'axe de rotation est l'espace propre associ ' la valeur propre %1.
0'orme 9.11
Fsomtries vectorielles de
l'espace E "
>
<our une isomtrie vectorielle 3 de
>
de dterminant :1, il existe une uni&ue rotation
vectorielle r d'axe et une uni&ue s,mtrie ort*ogonale 2 dont le plan est normal ' ,
telles &ue 3=r 2=2r . #n a donc affaire ' une rotation"rflexion !. L'axe de
rotation r est l'espace propre associ ' la valeur propre 1.
;a*ier /lg+bre D1 : L;< " 033=
ALGBRE LINAIRE L5
&#inition
@ormules
/mplitude d'une rotation
vectorielle
#n appelle trace d'une matrice carre la somme des lments situs sur sa diagonale
principale. #n note *r(A) la trace de la matrice carre A.
La trace d'une matrice carre A d'ordre n est gale ' $ *r(A) ) a11 + a00 + . + a
nn
.
;alcul de l'amplitude d'une rotation vectorielle de matrice associe ; $
1. pour une rotation vectorielle de
0
on a $ cos(o)=
*r (;)
0
0. pour une rotation vectorielle de
>
on a $ cos(o)=
*r (;)1
0
0'orme 9.12 Une isomtrie vectorielle de
>
de dterminant :1 est une s,mtrie ort*ogonale par
rapport ' un plan si et seulement si sa trace vaut %1.
Exercice 9.22
-rifie. &ue les endomorp*ismes de
0
donns ci"dessous par leur matrice relativement
' la base canoni&ue sont des isomtries vectorielles, et dtermine. leur nature
gomtri&ue.
a.
(
6
1
0
6
.>
0
.>
0
6
1
0
)
b.
(
3 1
1 3
)
c.
(
>
5
6
G
5
G
5
>
5
)
d.
(
cos(t ) 6 sin(t )
sin(t ) cos(t )
)
Exercice 9.2%
1Bmes &uestions &ue dans l'exercice J.00, mais dans
>
$
a.
1
J
(
1 6 G =
6 G I G
= G 1
)
b.
1
I
(
L 6 0 >
6 0 > L
6 > 6 L 0
)
9.1<. Applications
Dans beaucoup de domaines comme l'cologie, l'conomie et les sciences
appli&ues, on tablit des mod+les mat*mati&ues de p*nom+nes d,nami&ues &ui
voluent dans le temps. Les mesures d'un certain nombre de caractristi&ues du
s,st+me sont prises ' des mtervalles de temps rguliers, fournissant ainsi une suite de
vecteurs x
3
, x
1
, x
0
,.... Les composantes de x
&
rendent compte de l'tat du s,st+me au
moment de la &"+me mesure.
5'il existe une matrice A telle &ue x
1
) Ax
3
, x
0
) Ax
1
et, en gnral.
x
&%1
) Ax
&
pour & ) 3, 1, 0, ... (T)
alors (T) est appel une quation de rcurrence linaire (ou quation aux
di##rences #inies).
Exercice 9.2+
Les dmograp*es s'intressent aux dplacements de populations ou de groupes de
personnes d'un endroit vers une autre. 2ous exposons ici un mod+le simple &ui rend
compte des va"et"vient d'une population entre une certaine ville et ses faubourgs
immdiats durant un certain nombre d'annes.
#n c*oisit une anne initiale, disons 0333, et on dsigne les populations de la ville et
des faubourgs de cette anne"l' par 4
3
et f
3
respectivement. 5oit x
3
le vecteur
population x
3
=
(
4
3
f
3
)
en 0333, x
1
=
(
4
1
f
1
)
la population en 0331, etc.
Des tudes dmograp*i&ues ont montr &ue c*a&ue anne environ 5 U des *abitants
des villes migrent vers les faubourgs (J5 U restent en ville) tandis &ue > U &uittent
les faubourgs (et JI U restent dans les faubourgs) pour s'installer en ville.
;alcule. la population en 0331 et en 0330 de la rgion dont il vient d'Btre &uestion,
sac*ant &u'en 0333 elle se montait ' L33'333 citadins et G33'333 *abitants des
faubourgs.
D1 : L;< : 033= ;a*ier /lg+bre
LL '(A)I*RE +
;'est dans les valeurs propres et les vecteurs propres &ue se trouve la clef pour
comprendre le comportement ' long terme ou 4olution d'un s,st+me d,nami&ue
dcrit par une &uation de rcurrence x
&+1
=A x
&
.
2ous supposons &ue A est diagonalisable et poss+de n vecteurs propres linairement
indpendants 4
1
,..., 4
n
associs aux valeurs propres
1
, ..,
n
. Fl est commode de
supposer &ue les vecteurs propres sont ordonns de faMon &ue \
1
\
0
.\
n
.
;omme 64
1
, ..., 4
n
7 forme une base de
n
, tout vecteur initial x
3
peut Btre crit, de
faMon uni&ue toutefois, sous la forme
x
3
=c
1
4
1
+.+c
n
4
n
;ette >compo2ition en 4ecteur2 propre2 de x
3
dtermine enti+rement le comporte"
ment de la suite 6x
&
7. <uis&ue les 4
i
sont des vecteurs propres,
x
1
=A x
3
=c
1
A4
1
+.+c
n
A4
n
=c
1
\
1
4
1
+.+c
n
\
n
4
n
Dn gnral,
x
&
=c
1
(\
1
)
&
4
1
+.+c
n
(\
n
)
&
4
n
(& ) 3, 1, 0, ...)
Exercice 9.21
/u fond des forBts de s&uoias californiennes, les rats des bois aux pattes fonces
fournissent Cus&u'' =3U de la nourriture des c*ouettes, le principal prdateur de ce
rongeur. ;et exercice propose un s,st+me d,nami&ue linaire pour modliser le
s,st+me des c*ouettes et des rats. (De l'aveu gnral, le mod+le n'est pas raliste '
divers gards, mais il a le mrite de constituer un premier mod+le avant d'en aborder
d'autres non linaires plus compli&us utiliss par les spcialistes scientifi&ues de
l'environnement.)
#n dsigne les populations de c*ouettes et de rats au moment & par
x
&
=
(
'
&
R
&
)
, o@ &
est le temps en mois, '
&
le nombre de c*ouettes dans la rgion tudie et R
&
le
nombre de rats (en milliers). #n suppose &ue
'
& +1
= 3.5'
&
+ 3.G R
&
R
& +1
= 6 p'
&
+ 1.1 R
&
o@ p est un param+tre positif ' spcifier.
Le terme 3.5'
&
dans la premi+re &uation traduit le fait &u'en l'absence de rats pour
se nourrir seule la moiti des c*ouettes survivraient c*a&ue mois, tandis &ue le terme
1.1R
&
dans la deuxi+me &uation signifie &u'en l'absence des c*ouettes comme
prdateurs, le nombre de rats augmenterait de 13U par mois. 5i les rats sont
abondants, le 3.GR
&
tend ' faire croVtre la population des c*ouettes tandis &ue le terme
ngatif pW'
&
rend compte du nombre de rats disparus, mangs par les c*ouettes. (Dn
effet, 1333 p est le nombre mo,en de rats &u'une c*ouette mange c*a&ue mois.)
Dtermine. l'volution de ce s,st+me &uand le param+tre p est fix ' 3.13G.
9.11. =e qu'il #aut absolument savoir
KeconnaVtre un espace vectoriel (connaVtre les *uit lois de composition) J oX
5avoir ce &u'est une base J oX
KeconnaVtre une application linaire J oX
Donner le no,au et l'image d'une application linaire J oX
;alculer avec les matrices J oX
;alculer l'inverse d'une matrice J oX
;onnaVtre la tec*ni&ue de c*angement de base J oX
;alculer les valeurs propres et les vecteurs propres d'une matrice J oX
Dterminer la nature gomtri&ue d'un endomorp*isme J oX
;a*ier /lg+bre D1 : L;< " 033=
Vous aimerez peut-être aussi
- 40 Ans de Prison Ou 5 Ans de Travail ForcéDocument120 pages40 Ans de Prison Ou 5 Ans de Travail Forcéjoakim Kamga94% (129)
- Corrige TD Partie1Document12 pagesCorrige TD Partie1Chaymae ZakiPas encore d'évaluation
- Etudes de Cas Audit Comptable Et Financier PDFDocument22 pagesEtudes de Cas Audit Comptable Et Financier PDFTaha Can95% (63)
- Audit - Les Assertions D'audit PDFDocument1 pageAudit - Les Assertions D'audit PDFTaha Can83% (6)
- Cours Algèbre (S1) SMPC (Plus TDs Corrigés)Document81 pagesCours Algèbre (S1) SMPC (Plus TDs Corrigés)HAMZA ELYAAKOUBIPas encore d'évaluation
- Support 1 - Cours Fiscalité Internationale - M2 PDFDocument36 pagesSupport 1 - Cours Fiscalité Internationale - M2 PDFTaha Can86% (21)
- Présentation Des Normes IFRS - IAS PDFDocument46 pagesPrésentation Des Normes IFRS - IAS PDFTaha CanPas encore d'évaluation
- Cours - Finance D'entreprise Partie 2 PDFDocument32 pagesCours - Finance D'entreprise Partie 2 PDFTaha Can100% (5)
- Cours - Finance D'entreprise Partie 1 PDFDocument28 pagesCours - Finance D'entreprise Partie 1 PDFTaha Can91% (32)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Fiche Cours ASINSA1 StructureDocument2 pagesFiche Cours ASINSA1 StructureAzed Rh100% (2)
- Chapite Sur Les Intégrales Impropres, Prépa ECS: Fichier Extrait Du DocumentDocument14 pagesChapite Sur Les Intégrales Impropres, Prépa ECS: Fichier Extrait Du DocumentABRAHAM NENEPas encore d'évaluation
- Corrigés TD - Algèbre - 1Document26 pagesCorrigés TD - Algèbre - 1spectrum66Pas encore d'évaluation
- TD Elec Numérique Serie N1Document1 pageTD Elec Numérique Serie N1test100% (1)
- Algebre Chap 21Document10 pagesAlgebre Chap 21Nawel Ben AliPas encore d'évaluation
- Exo S Reduction Des EndomorphismesDocument4 pagesExo S Reduction Des EndomorphismesLOUEMBET BourgetPas encore d'évaluation
- °COURS Structures de Données en C FPODocument161 pages°COURS Structures de Données en C FPOosskd096Pas encore d'évaluation
- BILINEAIEDocument20 pagesBILINEAIEsallah100% (1)
- Matrices Symétriques Positives, Définies PositivesDocument2 pagesMatrices Symétriques Positives, Définies PositivesEssaidi AliPas encore d'évaluation
- Chap 2 Les Series NumériquesDocument11 pagesChap 2 Les Series NumériquesValentin BerchPas encore d'évaluation
- DiagonalisationDocument43 pagesDiagonalisationIdris AddouPas encore d'évaluation
- Pres Jordanisation PDFDocument25 pagesPres Jordanisation PDFothman okPas encore d'évaluation
- Feuille1-Espaces Affines PDFDocument3 pagesFeuille1-Espaces Affines PDFBrayann DiePas encore d'évaluation
- Structures Algébriques: Résumé: Schema Des Structures AlgebriquesDocument1 pageStructures Algébriques: Résumé: Schema Des Structures AlgebriqueszzomaridoPas encore d'évaluation
- Résumé de Cours - Séries Entières, Séries de Fourier PDFDocument8 pagesRésumé de Cours - Séries Entières, Séries de Fourier PDFngombe emmanuelPas encore d'évaluation
- Fiche Methode 12 Series EntieresDocument2 pagesFiche Methode 12 Series Entieresmd00730065Pas encore d'évaluation
- Crochet de LieDocument1 pageCrochet de LieEssaidi Ali0% (1)
- Examen AnalyseDocument2 pagesExamen AnalyseskipperPas encore d'évaluation
- DS 05Document16 pagesDS 05Houssam BenkerroumPas encore d'évaluation
- Résumé Du Cours Danalyse (Séries)Document4 pagesRésumé Du Cours Danalyse (Séries)hubfri50% (2)
- TD+Sol SMP-S3-2015-2016 by ExoSup - Com - CopieDocument49 pagesTD+Sol SMP-S3-2015-2016 by ExoSup - Com - Copieoumaima50% (2)
- Acetates5 (Integrales Complexes)Document7 pagesAcetates5 (Integrales Complexes)Eng. NKURUNZIZA ApollinairePas encore d'évaluation
- Série 2 - Exercice 2 - Electronique de PuissanceDocument1 pageSérie 2 - Exercice 2 - Electronique de Puissancekuzgun cebeci100% (1)
- Parties D'un EnsembleDocument0 pageParties D'un EnsemblePaul JeannotPas encore d'évaluation
- Séries NumériquesDocument6 pagesSéries Numériquesbroisy01828333% (3)
- Statistiques Resume de CoursDocument2 pagesStatistiques Resume de CoursOMAR ENNAYRIPas encore d'évaluation
- Équations DifférentiellesDocument5 pagesÉquations DifférentiellesR-win100% (3)
- Book Exo ElecDocument94 pagesBook Exo ElecMonsieur DENISPas encore d'évaluation
- Resume16 GroupesDocument5 pagesResume16 GroupesAyoubPas encore d'évaluation
- Revisions Algebre LineaireDocument53 pagesRevisions Algebre Lineairebestgaming player100% (1)
- DM 16 Exponentielle Des Matrices NilpotentesDocument3 pagesDM 16 Exponentielle Des Matrices Nilpotentesipest mp1Pas encore d'évaluation
- Chapitre 2 Applications LinéairesDocument12 pagesChapitre 2 Applications LinéairesImy MezPas encore d'évaluation
- Résumé Cours AlgèbreDocument3 pagesRésumé Cours Algèbrehibasnina8Pas encore d'évaluation
- Series NumDocument8 pagesSeries NumBadr El Boudour CordobistePas encore d'évaluation
- Cours Electronique ESTC Chapitre 5Document23 pagesCours Electronique ESTC Chapitre 5Mohamed Amine TouatiPas encore d'évaluation
- Université Abdelmalek Essaâdi - ENSA de Tanger AP2: ExerciceDocument2 pagesUniversité Abdelmalek Essaâdi - ENSA de Tanger AP2: ExerciceBrahimi El MehdiPas encore d'évaluation
- Mathématiques Appliquées, Chapitre 2Document19 pagesMathématiques Appliquées, Chapitre 2Abdelkader Faklani DouPas encore d'évaluation
- Exercice Theoreme de Thevenin PDFDocument2 pagesExercice Theoreme de Thevenin PDFAndrewPas encore d'évaluation
- CH 3 Théoreme de GAUSSDocument18 pagesCH 3 Théoreme de GAUSShazem dawahiPas encore d'évaluation
- Tout Savoir Sur Les MatricesDocument16 pagesTout Savoir Sur Les MatricesDelphine KukumsPas encore d'évaluation
- Td3 - Espaces Vectoriels Normes Topologie Sans CorrectionsDocument4 pagesTd3 - Espaces Vectoriels Normes Topologie Sans CorrectionsibouPas encore d'évaluation
- Section 2 4 Bases DimensionsDocument20 pagesSection 2 4 Bases DimensionsCatherine BenzPas encore d'évaluation
- Banque CCP Sup Analyse Corrige 1Document10 pagesBanque CCP Sup Analyse Corrige 1Arnold KpovihouanouPas encore d'évaluation
- Cours Algebre Lineaire SVDocument91 pagesCours Algebre Lineaire SVYves GarnardPas encore d'évaluation
- Cours MatricesDocument30 pagesCours MatricesAmine Malih100% (2)
- Cours Analyse Numérique 1 MipDocument52 pagesCours Analyse Numérique 1 Mipcours importantPas encore d'évaluation
- Résumer CCNA V5 PDFDocument31 pagesRésumer CCNA V5 PDFTaha Can67% (3)
- Brouillent PDFDocument37 pagesBrouillent PDFTaha CanPas encore d'évaluation
- Extrait Livres Comptabilité PDFDocument56 pagesExtrait Livres Comptabilité PDFTaha Can100% (1)
- Cours HTML PDFDocument5 pagesCours HTML PDFTaha Can100% (3)
- Support DFI Partie 1 PDFDocument44 pagesSupport DFI Partie 1 PDFTaha Can100% (1)
- Finance D'entreprises - Polycopie PDFDocument40 pagesFinance D'entreprises - Polycopie PDFTaha Can50% (2)
- Support DFI Partie 2 PDFDocument37 pagesSupport DFI Partie 2 PDFTaha Can100% (1)
- Template MémoireDocument1 pageTemplate MémoireTaha CanPas encore d'évaluation
- La Charte Du Mémoire PDFDocument2 pagesLa Charte Du Mémoire PDFTaha CanPas encore d'évaluation
- Résume CCNP PDFDocument8 pagesRésume CCNP PDFTaha Can100% (1)
- Méthodologie - Spécifier L'objet de La Recherche PDFDocument54 pagesMéthodologie - Spécifier L'objet de La Recherche PDFTaha Can100% (1)
- Fisca InternationaleDocument20 pagesFisca Internationalebrondas2100% (3)
- Examen Normes IFRS IAS PDFDocument1 pageExamen Normes IFRS IAS PDFTaha CanPas encore d'évaluation
- Présentation Des Normes IFRS - IAS PDFDocument67 pagesPrésentation Des Normes IFRS - IAS PDFTaha CanPas encore d'évaluation
- L'économétrie Des Series Chronologiques PDFDocument32 pagesL'économétrie Des Series Chronologiques PDFTaha Can100% (10)
- L'econométrie - Le Processus Stationnaire PDFDocument13 pagesL'econométrie - Le Processus Stationnaire PDFTaha Can100% (2)
- L'econométrie - La Règression PDFDocument50 pagesL'econométrie - La Règression PDFTaha Can100% (2)
- Généralités Sur L'audit1Document50 pagesGénéralités Sur L'audit1fzel100% (1)
- Examen Finance Islamique PDFDocument1 pageExamen Finance Islamique PDFTaha Can100% (1)
- Examen Econométrie PDFDocument1 pageExamen Econométrie PDFTaha Can100% (3)
- Cours - Objectifs de L'audit Financier PDFDocument24 pagesCours - Objectifs de L'audit Financier PDFTaha Can71% (7)
- Correction Examen Pilotage Des Projets PDFDocument4 pagesCorrection Examen Pilotage Des Projets PDFTaha Can100% (2)
- Cours - Méthodologie de La Préparation Du Mémoire PDFDocument20 pagesCours - Méthodologie de La Préparation Du Mémoire PDFTaha Can100% (2)
- Audit - QCM Sur L'audit Et Révision Légale PDFDocument4 pagesAudit - QCM Sur L'audit Et Révision Légale PDFTaha Can100% (3)
- Résumé de La LF 2024Document14 pagesRésumé de La LF 2024Abdelhakim Fallatte100% (1)
- Al5st03tepa0111 Sequence 06Document6 pagesAl5st03tepa0111 Sequence 06Tron AldoPas encore d'évaluation
- Appareil SensorielDocument13 pagesAppareil SensoriellaithPas encore d'évaluation
- Théâtre Immersif - WikipédiaDocument4 pagesThéâtre Immersif - WikipédiaRédaBouamaraPas encore d'évaluation
- Guide Preparatoire Aux MemDocument22 pagesGuide Preparatoire Aux MemFrançois LessardPas encore d'évaluation
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A PetroleMouhcine Ben MoussaPas encore d'évaluation
- Support Et ResistanceDocument11 pagesSupport Et Resistanceemmanuel nkemyPas encore d'évaluation
- BAC 2020 Consolidation N° 2Document3 pagesBAC 2020 Consolidation N° 2samoy100% (1)
- Manuel Neoh Expresso 10l 230518 PDFDocument84 pagesManuel Neoh Expresso 10l 230518 PDFykmail0582Pas encore d'évaluation
- TP - Code de Hamming H: Master Ice - M1Document1 pageTP - Code de Hamming H: Master Ice - M1Christian Vadillo100% (1)
- SICABLE CI - Rapport D'activités Du 1er Semestre 2021 - 2021-09-24Document1 pageSICABLE CI - Rapport D'activités Du 1er Semestre 2021 - 2021-09-24Ange Yohan Desvallees NdriPas encore d'évaluation
- Corpus - FiniDocument32 pagesCorpus - Finileroy makita loubakiPas encore d'évaluation
- Lecon Pratique EbaleDocument8 pagesLecon Pratique EbaleDarhel BirovaPas encore d'évaluation
- Annexe 3 - Etude DSPR - Retraite Pour InaptitudeDocument21 pagesAnnexe 3 - Etude DSPR - Retraite Pour InaptitudeValruinPas encore d'évaluation
- Révision Modélisation NoSQLDocument14 pagesRévision Modélisation NoSQLNora MouhibPas encore d'évaluation
- B2 Langue - Sujet_session 18 Mai 2024 GrèceDocument10 pagesB2 Langue - Sujet_session 18 Mai 2024 GrèceAlexandra DimitrakopoulouPas encore d'évaluation
- Justice Prédictive JPJ Maroc 2018Document30 pagesJustice Prédictive JPJ Maroc 2018Hajar RhaniPas encore d'évaluation
- Ext 90Document22 pagesExt 90Jilani OsmanePas encore d'évaluation
- Les Structures de DonnéesDocument6 pagesLes Structures de Donnéesa7mid7ilmiPas encore d'évaluation
- DocumentDocument2 pagesDocumentadrienngodebo7Pas encore d'évaluation
- Règlement Intérieur Des ApprenantsDocument23 pagesRèglement Intérieur Des Apprenantscdupuit55Pas encore d'évaluation
- SS1 2ND TERM REVIEWED FRENCH E-NOTES 2017Document28 pagesSS1 2ND TERM REVIEWED FRENCH E-NOTES 2017palmer okiemutePas encore d'évaluation
- Les Alcéne en Milieu Industriel 2Document7 pagesLes Alcéne en Milieu Industriel 2MOUNSIFPas encore d'évaluation
- Leboncoin Bon-D-EnvoiDocument1 pageLeboncoin Bon-D-EnvoiLucas GalluffoPas encore d'évaluation
- ANNEXE_4_-_Niveau_de_soins_neonatologieDocument5 pagesANNEXE_4_-_Niveau_de_soins_neonatologiemariemanar2Pas encore d'évaluation
- DZ NP Sikadur 41 emDocument3 pagesDZ NP Sikadur 41 emfaridPas encore d'évaluation
- PHD Thesis - Jean-Luc Kouassi - FinalDocument249 pagesPHD Thesis - Jean-Luc Kouassi - FinalBrou Guillaume KOUASSIPas encore d'évaluation
- MecatroniqueDocument12 pagesMecatroniqueMohamed BrahimiPas encore d'évaluation
- CG RapportDocument15 pagesCG Rapportkenz.boumadianePas encore d'évaluation