Compte Rendu: Travaux Pratique Automatique
Compte Rendu: Travaux Pratique Automatique
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Rapport Stage Fin Formation TriDocument41 pagesRapport Stage Fin Formation Triadnaneadnane67% (45)
- Rapport Stage Fin Formation TriDocument41 pagesRapport Stage Fin Formation Triadnaneadnane67% (45)
- TP 1 RégulationDocument7 pagesTP 1 RégulationNa Dir SayahPas encore d'évaluation
- TD8 Auto GMDocument1 pageTD8 Auto GMMehdi Jabrane IIPas encore d'évaluation
- Exercices 1Document2 pagesExercices 1koloPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- TD IdentificationDocument7 pagesTD IdentificationKhalifa BakkarPas encore d'évaluation
- Compte Rendue Du Module:: Modélisation Par Fonction de Transfert en MatlabDocument12 pagesCompte Rendue Du Module:: Modélisation Par Fonction de Transfert en MatlabSa rahPas encore d'évaluation
- TP Moteur Courant Continu Par Retour D EtatpdfDocument15 pagesTP Moteur Courant Continu Par Retour D EtatpdfHassan AbdouhPas encore d'évaluation
- M2 AII IA922 Corrigé-1Document3 pagesM2 AII IA922 Corrigé-1melhegueg nacerPas encore d'évaluation
- MCCDocument6 pagesMCCgengis_khan100% (1)
- TP 2 - Partie Théorique - Détermination de La Fonction de Transfert Dun Systèm Et Tracé Des Réponses Temporelles Et FréquentiellesDocument10 pagesTP 2 - Partie Théorique - Détermination de La Fonction de Transfert Dun Systèm Et Tracé Des Réponses Temporelles Et Fréquentiellesأيمن بوهراوةPas encore d'évaluation
- TP2 RST Mge1Document3 pagesTP2 RST Mge1hdjs5100% (1)
- TP #03 - Etap - EtdeDocument5 pagesTP #03 - Etap - EtdeAbdennour BendellaPas encore d'évaluation
- TD2-RAgulation IndustrielleDocument5 pagesTD2-RAgulation IndustrielleMaroua SederPas encore d'évaluation
- Td1 PDFDocument3 pagesTd1 PDFTamokoue100% (1)
- Solution TP AsservissementDocument9 pagesSolution TP AsservissementÄy MênPas encore d'évaluation
- Asservissement Régulation FC C2Document23 pagesAsservissement Régulation FC C2Guency Alven Rhocky KOMBILAPas encore d'évaluation
- TP 2: Analyse Temporelle Des Systemes Lineaires Utilisation SIMULINKDocument3 pagesTP 2: Analyse Temporelle Des Systemes Lineaires Utilisation SIMULINKbouzida ilyesPas encore d'évaluation
- ! Exercices - Systemes-Sequentiels - Fonctions-MémoiresDocument9 pages! Exercices - Systemes-Sequentiels - Fonctions-MémoiresTimo ShmittPas encore d'évaluation
- La Regulation RSTDocument9 pagesLa Regulation RSTJordan WilsonPas encore d'évaluation
- TD3 Modelisation Identification 2021Document5 pagesTD3 Modelisation Identification 2021saidPas encore d'évaluation
- Projet Ordonnancement Des Tâches Avec ArduinoDocument9 pagesProjet Ordonnancement Des Tâches Avec ArduinoalinPas encore d'évaluation
- Document Réponse TP3 2020 - 2021Document12 pagesDocument Réponse TP3 2020 - 2021Mohamed BouPas encore d'évaluation
- td3FIng 19-20Document2 pagestd3FIng 19-20badrPas encore d'évaluation
- TPs PDFDocument27 pagesTPs PDFZied Ben HamedPas encore d'évaluation
- Iut MC Et2 4 ForwardDocument5 pagesIut MC Et2 4 ForwardFatiPas encore d'évaluation
- Tp3 Mux DemuxDocument6 pagesTp3 Mux DemuxAliou DialloPas encore d'évaluation
- TP Logique Fhloue ENNASSIRI HamzaDocument8 pagesTP Logique Fhloue ENNASSIRI HamzaHamza ENNASSIRIPas encore d'évaluation
- TPDocument21 pagesTPAnonymous zt0fAEcKO3Pas encore d'évaluation
- Upload-Série D'exercices N°7-Asservissement-2014-2015Document7 pagesUpload-Série D'exercices N°7-Asservissement-2014-2015AmaniBarkawiPas encore d'évaluation
- Poly Adc 2ste Cours 1718Document69 pagesPoly Adc 2ste Cours 1718Abdellah El KhobziPas encore d'évaluation
- Cliquer Ici Pour Telecharger Les ExercicesDocument6 pagesCliquer Ici Pour Telecharger Les ExercicesUlrich DjagbaPas encore d'évaluation
- DDC - Etude Des Systèmes Échantillonnés EDocument57 pagesDDC - Etude Des Systèmes Échantillonnés Erajaa latifiPas encore d'évaluation
- TD2 CapteurDocument2 pagesTD2 CapteurMariam SajidPas encore d'évaluation
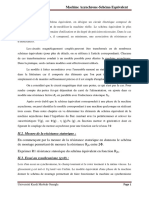
- Machine Asynchrone Du Schema Equivalent FinaleDocument11 pagesMachine Asynchrone Du Schema Equivalent FinaleOtman StariPas encore d'évaluation
- Ett0301 - TPDocument45 pagesEtt0301 - TPMohamed Amine100% (1)
- Cours 1 Diagrammed e FluenceDocument41 pagesCours 1 Diagrammed e Fluencejihadmak100% (2)
- Travail DemandeDocument4 pagesTravail DemandeMike NkouetchaPas encore d'évaluation
- 2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCDocument2 pages2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCimad el-ghayouryPas encore d'évaluation
- TP AutomatiqueDocument63 pagesTP AutomatiqueNabil BounouPas encore d'évaluation
- Travaux Pratiques Automatique Matlab Parie IDocument8 pagesTravaux Pratiques Automatique Matlab Parie Iaimad elosfourPas encore d'évaluation
- TP 03 1meltiDocument5 pagesTP 03 1meltikdjgkldfjlPas encore d'évaluation
- TP Nc2b02 Asservissement de La Vitesse Dun Moteur A Courant ContinuuDocument3 pagesTP Nc2b02 Asservissement de La Vitesse Dun Moteur A Courant Continuuangelico josephPas encore d'évaluation
- Mise A Niveau Pour L'Exploitation Des Boites A Outils de MatlabDocument7 pagesMise A Niveau Pour L'Exploitation Des Boites A Outils de MatlabCarlPas encore d'évaluation
- 4 TD4Document1 page4 TD4Anonymous IIfYg0lkPas encore d'évaluation
- Matérialisation Des Automatismes Décrits Par Grafcet À L Aide de SéquenceursDocument15 pagesMatérialisation Des Automatismes Décrits Par Grafcet À L Aide de SéquenceursAbbaPas encore d'évaluation
- Analyse Temporelle D'un Systeme Dynamique Du 1er OrdreDocument5 pagesAnalyse Temporelle D'un Systeme Dynamique Du 1er OrdreKamal Ghe100% (1)
- TD Auto 5Document2 pagesTD Auto 5Mohamed HmamouchPas encore d'évaluation
- TP-Représentation D'etatDocument9 pagesTP-Représentation D'etatKooraNow HDPas encore d'évaluation
- Examen S Normale CorrigDocument4 pagesExamen S Normale Corrigfarizadam20051027Pas encore d'évaluation
- TP Asservissement: 1. ObjectifDocument7 pagesTP Asservissement: 1. ObjectifIferdin AsmaePas encore d'évaluation
- Régulation PID PDFDocument15 pagesRégulation PID PDFAmine AzaoumPas encore d'évaluation
- TP - 2 - Modélisation Et Identification Des Systèmes Électriques - M1Document2 pagesTP - 2 - Modélisation Et Identification Des Systèmes Électriques - M1Hafa ApbPas encore d'évaluation
- Chapitre 4Document5 pagesChapitre 4anasPas encore d'évaluation
- Rapport de Travaux Pratique de Traitement de Signal: Réaliser Par: Laaouich Mohamed CNE: H134193990Document17 pagesRapport de Travaux Pratique de Traitement de Signal: Réaliser Par: Laaouich Mohamed CNE: H134193990clash of clans / MEDPas encore d'évaluation
- TP Masters Mmss 2018 2019Document14 pagesTP Masters Mmss 2018 2019Sòumia ElPas encore d'évaluation
- Regulation de La Vitesse DDocument8 pagesRegulation de La Vitesse Dbadre989100% (2)
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Al Echcheikh El AlaouiTP2Document7 pagesAl Echcheikh El AlaouiTP2adnaneadnane0% (1)
- NAO Software FinaDocument47 pagesNAO Software Finaadnaneadnane100% (1)
- Architecture Technique de SécuritéDocument19 pagesArchitecture Technique de Sécuritéadnaneadnane100% (2)
- TP2 Al EchcheikhDocument9 pagesTP2 Al EchcheikhadnaneadnanePas encore d'évaluation
- Architecture Technique de SécuritéDocument20 pagesArchitecture Technique de Sécuritéadnaneadnane50% (2)
- tp1 - Statistique Compte Rendu: Travaux Pratique Statistique Uni Variée Et BivariéeDocument8 pagestp1 - Statistique Compte Rendu: Travaux Pratique Statistique Uni Variée Et BivariéeadnaneadnanePas encore d'évaluation
- Al Echcheikh El Alaoui EconomieDocument4 pagesAl Echcheikh El Alaoui EconomieadnaneadnanePas encore d'évaluation
- Al Echcheikh El Alaoui Jeu Du PenduDocument3 pagesAl Echcheikh El Alaoui Jeu Du PenduadnaneadnanePas encore d'évaluation
- Al Echcheikh El AlaouiTP3Document6 pagesAl Echcheikh El AlaouiTP3adnaneadnanePas encore d'évaluation
- Oracl ProjetDocument18 pagesOracl ProjetSafae AderdourPas encore d'évaluation
- Rapport LVQRDocument8 pagesRapport LVQRMouad Dahbi100% (1)
- Rapport de Mini3A Gestion de Bulletin de Notes Visual BasicDocument13 pagesRapport de Mini3A Gestion de Bulletin de Notes Visual Basicadnaneadnane88% (8)
- Expression Loi D'attractionDocument3 pagesExpression Loi D'attractionadnaneadnanePas encore d'évaluation
- Compte Rendu TP1 Analyse NumériqueDocument14 pagesCompte Rendu TP1 Analyse Numériqueadnaneadnane60% (5)
- La Sauvegarde Informatique IGA MAROCDocument40 pagesLa Sauvegarde Informatique IGA MAROCadnaneadnane100% (2)
- TECHNIQUES DE RESEAUX INFORMATIQUES WWW - Suptri.on - MaDocument2 pagesTECHNIQUES DE RESEAUX INFORMATIQUES WWW - Suptri.on - Maadnaneadnane100% (1)
- Introduction A La Gestion de ProjetDocument26 pagesIntroduction A La Gestion de Projetadnaneadnane100% (2)
- Diagnostic Et Résolution de ProblèmesDocument32 pagesDiagnostic Et Résolution de Problèmesadnaneadnane83% (12)
- PROJET Fin FormationDocument70 pagesPROJET Fin Formationadnaneadnane71% (7)
- Étude Comparative: Systèmes de Gestion de ContenuDocument39 pagesÉtude Comparative: Systèmes de Gestion de Contenuadnaneadnane100% (1)
- Module 15. Communication en Anglais Dans Un Contexte de TravailDocument148 pagesModule 15. Communication en Anglais Dans Un Contexte de Travailadnaneadnane100% (6)
- Module 21: Administration de Réseaux InformatiquesDocument20 pagesModule 21: Administration de Réseaux Informatiquesadnaneadnane100% (8)
- Guide PédagogiqueDocument204 pagesGuide PédagogiqueadnaneadnanePas encore d'évaluation
- Module 16. Architecture Et Fonctionnement D'un Réseau InformatiqueDocument51 pagesModule 16. Architecture Et Fonctionnement D'un Réseau Informatiqueadnaneadnane90% (20)
- Installation D'un Poste InformatiqueDocument20 pagesInstallation D'un Poste Informatiqueadnaneadnane100% (4)
- T449.03 - Tvprp868a08 FRDocument15 pagesT449.03 - Tvprp868a08 FROlivier CoccallottoPas encore d'évaluation
- Didacticiel Quartus IIDocument59 pagesDidacticiel Quartus IIREDNANI100% (1)
- Tracé de Câbles - FRADocument37 pagesTracé de Câbles - FRAmahammedi noreddinePas encore d'évaluation
- Cours de Capteur Industriel Et Chaine de Mesure: Departement D'Electrotchnique: Niveau: 3 (Semestre 6)Document7 pagesCours de Capteur Industriel Et Chaine de Mesure: Departement D'Electrotchnique: Niveau: 3 (Semestre 6)Fotcha EricPas encore d'évaluation
- Catalogue Benson Audiovisuel-12-2022Document78 pagesCatalogue Benson Audiovisuel-12-2022David LynxPas encore d'évaluation
- App Inventor: Communication Via BluetoothDocument5 pagesApp Inventor: Communication Via BluetoothGuesmi KarimPas encore d'évaluation
- Mémoire Finale (Chapitre2)Document28 pagesMémoire Finale (Chapitre2)Âÿâčhê ÎsmâïlPas encore d'évaluation
- Microsoft Word - Generalité Sur Les ReseauDocument49 pagesMicrosoft Word - Generalité Sur Les Reseausaid amer yacine100% (1)
- Chapitre 2 Architecture FPGADocument38 pagesChapitre 2 Architecture FPGAHichem GuedriPas encore d'évaluation
- Cours M1 AII - ACM - Redresseur 3 - PHDocument12 pagesCours M1 AII - ACM - Redresseur 3 - PHNassim KahouadjiPas encore d'évaluation
- L3 Telecom-Lecture 03 (2021)Document28 pagesL3 Telecom-Lecture 03 (2021)RickDieu-veille BatchymahoutaPas encore d'évaluation
- Modulation de Largeur D'impulsion - WikipédiaDocument4 pagesModulation de Largeur D'impulsion - WikipédiaHajar BenbraititPas encore d'évaluation
- APP MX2 FR 00 SafeLine MX2 Manual v421 FRDocument20 pagesAPP MX2 FR 00 SafeLine MX2 Manual v421 FRMehdiPas encore d'évaluation
- Kac 9106D (En, FR, SP)Document2 pagesKac 9106D (En, FR, SP)texPas encore d'évaluation
- La Couche PhysiqueDocument25 pagesLa Couche PhysiqueLeila KararPas encore d'évaluation
- 1KHW001489-FR Manual D'utilisation ETL600Document514 pages1KHW001489-FR Manual D'utilisation ETL600kass_ecs100% (1)
- Jannin Francois Sonet SDHDocument37 pagesJannin Francois Sonet SDHEsmail AhouziPas encore d'évaluation
- COURS Decouverte I Licence Telecom S4 USTHB 2eme PartieDocument29 pagesCOURS Decouverte I Licence Telecom S4 USTHB 2eme PartieNoureddine BougreaPas encore d'évaluation
- Installation Et Optimisation-P1Document10 pagesInstallation Et Optimisation-P1Youssef BourarPas encore d'évaluation
- Megahertz Magazine 2000 202Document96 pagesMegahertz Magazine 2000 202karimm1Pas encore d'évaluation
- Communication Par Satellite L3 Télécoms v2Document1 pageCommunication Par Satellite L3 Télécoms v2Voundai MahamatPas encore d'évaluation
- Les Circuits IntegresDocument71 pagesLes Circuits IntegresBilel Ben Jamel Souidi100% (1)
- Cours NGN SBDocument45 pagesCours NGN SBBilel AmeurPas encore d'évaluation
- Expose Zouheyr Sur Les Systemes Intelligents Exemple CRS 2014Document20 pagesExpose Zouheyr Sur Les Systemes Intelligents Exemple CRS 2014Abdel MadjidPas encore d'évaluation
- Bichi KhiDocument4 pagesBichi KhiAli AourdouPas encore d'évaluation
- Utc14 PDFDocument3 pagesUtc14 PDFAnonymous cXAbOb5E9Pas encore d'évaluation
- Fibre OptiqDocument14 pagesFibre OptiqsevemassePas encore d'évaluation
- Gsm-3a SiDocument28 pagesGsm-3a Sisamvip100% (1)
- Fender Eighty FiveDocument6 pagesFender Eighty FivePhilippe-Alexandre BoitelPas encore d'évaluation
- DXP French ManualDocument23 pagesDXP French ManualAlain StchouschenkoPas encore d'évaluation