Topic 1: Introduction To Control System and Mathematical Review
Topic 1: Introduction To Control System and Mathematical Review
Download as pdf or txt
You might also like
- FeedCon (Unit 1) PDFDocument17 pagesFeedCon (Unit 1) PDFAbby MacallaNo ratings yet
- Obor - Prelim-Exam-for-Feedback-and-Control-SystemDocument5 pagesObor - Prelim-Exam-for-Feedback-and-Control-SystemDhikbuttNo ratings yet
- IntroductionDocument39 pagesIntroductionMohd FazliNo ratings yet
- Closed Loop Control SystemDocument6 pagesClosed Loop Control SystemMUHAMMAD AKRAMNo ratings yet
- Control System 1Document29 pagesControl System 1Gabriel GalizaNo ratings yet
- Introduction To Automatic ControlDocument10 pagesIntroduction To Automatic ControlFatih YıldızNo ratings yet
- Me55 Control Engineering (Common To ME/IP/MA/AU) Sub Code: ME55 IA Marks: 25 Hrs/Week: 04 Exam Hours: 03 Total HRS.: 52 Exam Marks:100Document7 pagesMe55 Control Engineering (Common To ME/IP/MA/AU) Sub Code: ME55 IA Marks: 25 Hrs/Week: 04 Exam Hours: 03 Total HRS.: 52 Exam Marks:100Manasa Sathyanarayana SNo ratings yet
- Alvarez Johndave Bsece412 Ass#1Document4 pagesAlvarez Johndave Bsece412 Ass#1MelanieNo ratings yet
- Introduction 23Document16 pagesIntroduction 23Ggfgsgege GegsgsNo ratings yet
- Dynamical System ModelDocument47 pagesDynamical System ModelYeimy QuevedoNo ratings yet
- CONTROL ENGINEERING IDocument7 pagesCONTROL ENGINEERING IIshmael AbdulNo ratings yet
- Examples of Control Systems:: Lecture OneDocument4 pagesExamples of Control Systems:: Lecture OnemornyNo ratings yet
- Bcs (Unit 1)Document23 pagesBcs (Unit 1)sivamani CHINNASWAMYNo ratings yet
- Control Systems Notes DEE M2 JuneDocument34 pagesControl Systems Notes DEE M2 JuneThairu MuiruriNo ratings yet
- Linear control systems_240103_213740Document49 pagesLinear control systems_240103_213740Jauvenel JauviNo ratings yet
- Effect Relationship For TheDocument5 pagesEffect Relationship For TheByron MawoyoNo ratings yet
- MEFC-117_lesson1Document17 pagesMEFC-117_lesson1Domingo NoverasNo ratings yet
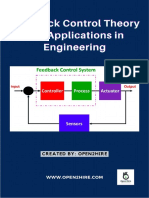
- Feedback Control TheoryDocument16 pagesFeedback Control TheorykelvinNo ratings yet
- Contyrol Systems Revision-1-1Document33 pagesContyrol Systems Revision-1-1generaliemmanuel1No ratings yet
- controlICS CH1Document5 pagescontrolICS CH1Magarsaa Qana'iiNo ratings yet
- Lecture Notes NewDocument76 pagesLecture Notes NewBethany LerewanuNo ratings yet
- Control SystemsDocument28 pagesControl SystemsMadhuri PotluriNo ratings yet
- Control System Engineering - IDocument212 pagesControl System Engineering - IAjit Kumar Kisku100% (1)
- Control SystemsDocument12 pagesControl Systemsoyebowale.emmanuelNo ratings yet
- Process ControlDocument39 pagesProcess ControlMonty KushwahaNo ratings yet
- 1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemDocument33 pages1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemAzhar AliNo ratings yet
- Topic 3.0 ECE-TCE2207Introduction to Feedback Controllers (2207)Document5 pagesTopic 3.0 ECE-TCE2207Introduction to Feedback Controllers (2207)Patrina PhiriNo ratings yet
- Topic 1. Introduction To Control Systems DesignDocument14 pagesTopic 1. Introduction To Control Systems DesignxREDCivicCometxNo ratings yet
- Funda 1Document134 pagesFunda 1johnpaul varonaNo ratings yet
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinNo ratings yet
- Basic Terminologies in Control SystemDocument6 pagesBasic Terminologies in Control Systemtampisjustine704No ratings yet
- CS Comlete NotesDocument187 pagesCS Comlete Notesmanasatp773No ratings yet
- Control System ReportDocument2 pagesControl System ReportJane SigaNo ratings yet
- Unit-1 NotesDocument43 pagesUnit-1 NotesMD SHAHRIARMAHMUDNo ratings yet
- Lcs Unit 1 PDFDocument30 pagesLcs Unit 1 PDFRajasekhar AtlaNo ratings yet
- CompensationDocument2 pagesCompensationSneha NagarNo ratings yet
- Basics of Control Eng 1Document26 pagesBasics of Control Eng 1Hezron gibronNo ratings yet
- LESSON1 IntroToControlSystemDocument10 pagesLESSON1 IntroToControlSystemalexancog456No ratings yet
- 1.introduction To Control System EngineeringDocument40 pages1.introduction To Control System EngineeringAbror md FayiazNo ratings yet
- Chapter OneDocument28 pagesChapter OneSurafel TadesseNo ratings yet
- Process Control SystemsDocument6 pagesProcess Control SystemsRae angelo Agonoy100% (1)
- Automatic ControlDocument53 pagesAutomatic ControlGeorge mosesNo ratings yet
- Report SeminarDocument23 pagesReport SeminarpradnyaekadNo ratings yet
- EE2253 NotesDocument124 pagesEE2253 NotesSiva Kathikeyan100% (1)
- Cpe 315 Feedback Control System LessonsDocument28 pagesCpe 315 Feedback Control System Lessonskeny amigableNo ratings yet
- Chapter OneDocument21 pagesChapter OnetimketaNo ratings yet
- EE2253 - Control Systems PDFDocument124 pagesEE2253 - Control Systems PDFaduveyNo ratings yet
- EE2253 - Control SystemsDocument124 pagesEE2253 - Control SystemsrameshsmeNo ratings yet
- Week 1 - L1 - Introduction and Basic Concepts of ControlDocument33 pagesWeek 1 - L1 - Introduction and Basic Concepts of ControlOlerile AnaniaNo ratings yet
- Clas 01Document22 pagesClas 01testmobica13No ratings yet
- Control System FinalDocument200 pagesControl System FinalqwertyNo ratings yet
- Control Engineering: Types of Control SystemsDocument26 pagesControl Engineering: Types of Control SystemsGilbert SigalaNo ratings yet
- Chapter 1 - Transfer FunctionDocument52 pagesChapter 1 - Transfer FunctionNahome NigussieNo ratings yet
- Chapter01 - Introduction To Control SystemDocument9 pagesChapter01 - Introduction To Control SystemNdidiamaka Nwosu AmadiNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Application of Internship Placement For Engineering StudentDocument1 pageApplication of Internship Placement For Engineering StudentFaez FeakryNo ratings yet
- Admin Ent Young MillionaireeDocument15 pagesAdmin Ent Young MillionaireeFaez FeakryNo ratings yet
- Mem575 Industrial Management Course Outline PM IsmailDocument8 pagesMem575 Industrial Management Course Outline PM IsmailFaez FeakryNo ratings yet
- Universiti Teknologi Mara (Uitm) Shah AlamDocument1 pageUniversiti Teknologi Mara (Uitm) Shah AlamFaez FeakryNo ratings yet
- Numec BaruDocument16 pagesNumec BaruFaez FeakryNo ratings yet
- Mec500 Chapter 2 - AtmaDocument31 pagesMec500 Chapter 2 - AtmaFaez FeakryNo ratings yet
- Assignment 1Document1 pageAssignment 1Faez FeakryNo ratings yet
- Mem575 Industrial Management Course Outline PM IsmailDocument8 pagesMem575 Industrial Management Course Outline PM IsmailFaez FeakryNo ratings yet
- Alternative SolutionDocument4 pagesAlternative SolutionFaez FeakryNo ratings yet
- Recommendations & ConclusionDocument3 pagesRecommendations & ConclusionFaez Feakry100% (2)
- Apparatus Foundry (Faiz)Document3 pagesApparatus Foundry (Faiz)Faez FeakryNo ratings yet
- LS5 - Heat Conduction (Simple Bar)Document3 pagesLS5 - Heat Conduction (Simple Bar)Faez Feakry100% (1)
- 5.0 Method of Approach Sand and Mold PreparationDocument6 pages5.0 Method of Approach Sand and Mold PreparationFaez FeakryNo ratings yet
- 10.0 References: Micro-And Nano-Metrology". Meas. Sci. Technol. 17, 504-509Document1 page10.0 References: Micro-And Nano-Metrology". Meas. Sci. Technol. 17, 504-509Faez FeakryNo ratings yet
- 1.0 TittleDocument4 pages1.0 TittleFaez FeakryNo ratings yet
- ReferencesDocument1 pageReferencesFaez FeakryNo ratings yet
- LS2 - Variation in Refrigeration Coefficient of Performance at Various Operating ConditionsDocument7 pagesLS2 - Variation in Refrigeration Coefficient of Performance at Various Operating ConditionsFaez Feakry100% (1)
- CH01 Introduction LatestDocument58 pagesCH01 Introduction LatestFaez FeakryNo ratings yet
- Results and Data Analysis: 2 Cups of Pallets Cup + Pallets 0.116 KGDocument2 pagesResults and Data Analysis: 2 Cups of Pallets Cup + Pallets 0.116 KGFaez FeakryNo ratings yet
- U4 l18 Numericals On Welded ConnectionsDocument5 pagesU4 l18 Numericals On Welded ConnectionsSanjeev SahuNo ratings yet
- Non-Homogeneous Differential Equation Chapter 4Document19 pagesNon-Homogeneous Differential Equation Chapter 4Abhishek JainNo ratings yet
- In Situ Balancing ProcedureDocument7 pagesIn Situ Balancing ProcedureĐỗ Đình DũngNo ratings yet
- Part A (2 Marks) : Department of Electronics and Communication Engineering Model ExaminationDocument8 pagesPart A (2 Marks) : Department of Electronics and Communication Engineering Model ExaminationdonavallishanmukasaiNo ratings yet
- Wlas q4 English 10 Week 2Document10 pagesWlas q4 English 10 Week 2Norhassan MoctarNo ratings yet
- Microwave Oven E BookDocument23 pagesMicrowave Oven E BookgkavosNo ratings yet
- Mathematics Throughout The Ages: Witold Wiȩsław Geometry in Poland in XV - XVIII CenturiesDocument17 pagesMathematics Throughout The Ages: Witold Wiȩsław Geometry in Poland in XV - XVIII Centuriesobelix2No ratings yet
- Buckling Strength of PileDocument17 pagesBuckling Strength of PileKit ChinNo ratings yet
- MI1016 Final QuestionDocument1 pageMI1016 Final QuestionĐức Anh LêNo ratings yet
- 1 1 1 A Vex SimplemachineinvestigationDocument12 pages1 1 1 A Vex Simplemachineinvestigationapi-256165085No ratings yet
- 2002Document38 pages2002B GirishNo ratings yet
- Class Test 1 EcIIDocument1 pageClass Test 1 EcIIjayj_5No ratings yet
- JEE Mains Free Mock Test 2015Document65 pagesJEE Mains Free Mock Test 2015smrutirekhaNo ratings yet
- S.1 GeogDocument2 pagesS.1 GeogMulangira Mulangira100% (1)
- DS-1LN6OUTPE-UUTP-Cat6-PE-24AWG-Cable-202308Document3 pagesDS-1LN6OUTPE-UUTP-Cat6-PE-24AWG-Cable-202308soportegspbucaramangaNo ratings yet
- Heat Pipe - Scientific AmericanDocument10 pagesHeat Pipe - Scientific AmericanEduardo Ocampo HernandezNo ratings yet
- New SI Units 2018Document43 pagesNew SI Units 2018Jeetu RaoNo ratings yet
- JEE Main Maths Logarithm Previous Year Questions With SolutionsDocument9 pagesJEE Main Maths Logarithm Previous Year Questions With SolutionsRina prasadNo ratings yet
- 3512C 2550 BHP SpecDocument6 pages3512C 2550 BHP SpecYasser JaviNo ratings yet
- Numerical Analysis/The Secant MethodDocument6 pagesNumerical Analysis/The Secant MethodSandesh AhirNo ratings yet
- Load FactorDocument4 pagesLoad Factormgskumar100% (1)
- Me 8301 EtdDocument3 pagesMe 8301 Etdsrinithims78No ratings yet
- School of ThoughtDocument34 pagesSchool of ThoughtsheilaNo ratings yet
- 12.1young's Double Slit ExperimentDocument12 pages12.1young's Double Slit Experimentsingapore4dlottery-dot-comNo ratings yet
- Theories of Matter in Greek Philosophy: The History of ChemistryDocument28 pagesTheories of Matter in Greek Philosophy: The History of ChemistryLoo DrBradNo ratings yet
- ProddocspdfDocument52 pagesProddocspdfBhuban Limbu100% (1)
- StereolitografieDocument3 pagesStereolitografieIonuț StănculeaNo ratings yet
- Computers & Fluids: Tapan K. Sengupta, Himanshu Singh, Swagata Bhaumik, Rajarshi R. ChowdhuryDocument12 pagesComputers & Fluids: Tapan K. Sengupta, Himanshu Singh, Swagata Bhaumik, Rajarshi R. ChowdhurySwagata BhaumikNo ratings yet
- LSim DOC V3 0 0 enDocument46 pagesLSim DOC V3 0 0 enJes TecnosNo ratings yet
- Introduction of UPIS 2018Document3 pagesIntroduction of UPIS 2018Satria Nur Karim AmrullahNo ratings yet