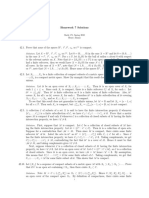
FA TA Week 4
FA TA Week 4
Download as pdf or txt
You might also like
- Functional Analysis Week03 PDFDocument16 pagesFunctional Analysis Week03 PDFGustavo Espínola MenaNo ratings yet
- Math 139 Fourier Analysis Notes PDFDocument212 pagesMath 139 Fourier Analysis Notes PDFAidan HolwerdaNo ratings yet
- FA TA Week 3Document5 pagesFA TA Week 3linzexvaa44No ratings yet
- Lecture Notes 8: 2.10 Measure of C MapsDocument6 pagesLecture Notes 8: 2.10 Measure of C MapsSanjeev ShuklaNo ratings yet
- hw3 SolnsDocument5 pageshw3 SolnsOm Mani Padme HumNo ratings yet
- 1 Banach Spaces and Hilbert SpacesDocument10 pages1 Banach Spaces and Hilbert SpacesMarco Antonio Alpaca Ch.No ratings yet
- Lower Bounds For Numbers of ABC-Hits: Sander Dahmen October 5, 2006Document9 pagesLower Bounds For Numbers of ABC-Hits: Sander Dahmen October 5, 2006Dmitri MartilaNo ratings yet
- GEORGIAN MATHEMATICAL JOURNAL: Vol. 5, No. 2, 1998, 101-106: Key Words and Phrases. Ergodic Hilbert TransformDocument6 pagesGEORGIAN MATHEMATICAL JOURNAL: Vol. 5, No. 2, 1998, 101-106: Key Words and Phrases. Ergodic Hilbert TransformLuis Alberto FuentesNo ratings yet
- Functional Analysis Exam: N N + N NDocument3 pagesFunctional Analysis Exam: N N + N NLLászlóTóthNo ratings yet
- Sheet 6Document2 pagesSheet 6salome.mose2No ratings yet
- QE-(Analysis)-2024-Fall-KeyDocument5 pagesQE-(Analysis)-2024-Fall-Keyy100000agrawalNo ratings yet
- Tutsheet6newDocument4 pagesTutsheet6newzaidullahkhan2003No ratings yet
- ch7suppsolDocument72 pagesch7suppsolBijay NagNo ratings yet
- Midterm Solutions: N N N N N N N N N N NDocument4 pagesMidterm Solutions: N N N N N N N N N N NNitish KumarNo ratings yet
- Solutions To Exercises:, Y) ) Is Dense in X y /2 /2Document72 pagesSolutions To Exercises:, Y) ) Is Dense in X y /2 /2Ignacio Javier IbarraNo ratings yet
- 2050 Atset 2018Document2 pages2050 Atset 2018Samuel Alfonzo Gil BarcoNo ratings yet
- Real Analysis and Measure Theory1Document7 pagesReal Analysis and Measure Theory1ad062376No ratings yet
- Problem Set #6 Math 471 - Real Analysis Assignment: Chapter 2 #4, 16 Chapter 3 #3, 21 Chapter 4 #4, 8, 12Document8 pagesProblem Set #6 Math 471 - Real Analysis Assignment: Chapter 2 #4, 16 Chapter 3 #3, 21 Chapter 4 #4, 8, 12Alejandro GomezNo ratings yet
- CLT PDFDocument13 pagesCLT PDFsalmanNo ratings yet
- MSRI Sheet 1Document4 pagesMSRI Sheet 1ct uNo ratings yet
- Fundamentals of Probability. 6.436/15.085: Markov Chains III. Periodicity, Mixing, AbsorptionDocument6 pagesFundamentals of Probability. 6.436/15.085: Markov Chains III. Periodicity, Mixing, AbsorptionSaurabh ShandilyaNo ratings yet
- Homework 2 Real Analysis: Joshua Ruiter March 23, 2018Document4 pagesHomework 2 Real Analysis: Joshua Ruiter March 23, 2018홍석우No ratings yet
- MI Set 3Document2 pagesMI Set 3chaymaahamou2015No ratings yet
- Uniform Boundedness (Gliding Hump)Document6 pagesUniform Boundedness (Gliding Hump)rbb_l181No ratings yet
- Continuous FunctionsDocument19 pagesContinuous Functionsap021No ratings yet
- Contractions: 3.1 Metric SpacesDocument10 pagesContractions: 3.1 Metric SpacesDaniel Sastoque BuitragoNo ratings yet
- 6 Uniform Boundedness PrincipleDocument6 pages6 Uniform Boundedness PrincipleMiguel Angel Mora LunaNo ratings yet
- CONSECUTIVE PRIMES IN SHORT INTERVALS ARTYOM RADOMSKII - Proc Steklov Institute - Maynard - Radziwill-MatomakiDocument82 pagesCONSECUTIVE PRIMES IN SHORT INTERVALS ARTYOM RADOMSKII - Proc Steklov Institute - Maynard - Radziwill-MatomakiSam TaylorNo ratings yet
- Homework # 6: Name: MAT201A University of California, Davis Fall 2017Document2 pagesHomework # 6: Name: MAT201A University of California, Davis Fall 2017ant314159265No ratings yet
- Cap 1 SolucionesDocument3 pagesCap 1 SolucionesAndres KovacsNo ratings yet
- 2008 Seemous Problems SolutionsDocument4 pages2008 Seemous Problems SolutionsHipstersdssadadNo ratings yet
- 1 s2.0 S0362546X9800056X MainDocument7 pages1 s2.0 S0362546X9800056X MainLiliana GuranNo ratings yet
- Lec 7Document7 pagesLec 7nnguyen22No ratings yet
- P Eter Varj UDocument62 pagesP Eter Varj Ualin444444No ratings yet
- Ch1-Folland withMarginNotes PDFDocument8 pagesCh1-Folland withMarginNotes PDFLiheng LeiNo ratings yet
- Hausdorff Dimension and FractalsDocument8 pagesHausdorff Dimension and FractalsAsad AbozedNo ratings yet
- MIT6 436JF18 Lec23Document9 pagesMIT6 436JF18 Lec23DevendraReddyPoreddyNo ratings yet
- Introduction To Algebraic Topology: Martin CadekDocument5 pagesIntroduction To Algebraic Topology: Martin CadekIngrid MartinezNo ratings yet
- LusinDocument9 pagesLusinMurali KNo ratings yet
- Fa 19 Ex 7 SolDocument6 pagesFa 19 Ex 7 Solsh zeshan iqbal ZeshanNo ratings yet
- MA417-Lecture-25_26Document19 pagesMA417-Lecture-25_26Jittu YadavNo ratings yet
- HW1 SolutionsDocument9 pagesHW1 SolutionsAntonNo ratings yet
- On The Mean Ergodic Theorem For CesDocument13 pagesOn The Mean Ergodic Theorem For CesTrúc PhươngNo ratings yet
- Exam 2 Functional - Analysis (IMPA 2023) - SolutionsDocument9 pagesExam 2 Functional - Analysis (IMPA 2023) - SolutionsMauro VasconcellosNo ratings yet
- Math 171, Spring 2010 Henry AdamsDocument4 pagesMath 171, Spring 2010 Henry Adamspratheesh mathewNo ratings yet
- sol3_2020Document5 pagessol3_2020gcy572092284No ratings yet
- Math6338 hw7 PDFDocument3 pagesMath6338 hw7 PDFSamantha' Dextre EspinozaNo ratings yet
- Approximation in Statistical Sense by N MultipleDocument8 pagesApproximation in Statistical Sense by N MultipleSelin HAMAMCIYANNo ratings yet
- Summer School in Statistics Exercices On Martingales: 1 Autoregressive ProcessDocument4 pagesSummer School in Statistics Exercices On Martingales: 1 Autoregressive ProcessKim PhamNo ratings yet
- 2011 U of I Mock Putnam Contest SolutionsDocument5 pages2011 U of I Mock Putnam Contest SolutionsGag PafNo ratings yet
- Chapter 2 Metric Spaces 2018Document19 pagesChapter 2 Metric Spaces 2018PutriNo ratings yet
- Chebyshev Polynomials (Cook)Document4 pagesChebyshev Polynomials (Cook)yacp16761No ratings yet
- 2.2. Lebesgue Outer Measure.Document3 pages2.2. Lebesgue Outer Measure.Whatsapp Status & Tiktok videosNo ratings yet
- ScientificComputing HW1Document3 pagesScientificComputing HW1arashnasr79No ratings yet
- 27200 HW2-1Document3 pages27200 HW2-1Happy SinghNo ratings yet
- Practice Problem Set 1Document1 pagePractice Problem Set 1abhay kumarNo ratings yet
- hw3 3 (Problema5) PDFDocument3 pageshw3 3 (Problema5) PDFGabo GaboNo ratings yet
- NumericalDocument13 pagesNumericalYodaking MattNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and ApplicationsFrom EverandGreen's Function Estimates for Lattice Schrödinger Operators and ApplicationsNo ratings yet
- Single Variable CalculusDocument54 pagesSingle Variable CalculusTAEHYUNGNo ratings yet
- MM1A2d Simplify Rational Expr Row GameDocument1 pageMM1A2d Simplify Rational Expr Row GameMegan GoldingNo ratings yet
- Algebra 1 Test and SolutionDocument11 pagesAlgebra 1 Test and SolutionZulfan AhmadiNo ratings yet
- L1-L3 Linear TransformationDocument35 pagesL1-L3 Linear TransformationHarshini MNo ratings yet
- Nil PotentDocument5 pagesNil PotentpepitolavoeNo ratings yet
- Nature: (Permutations)Document1 pageNature: (Permutations)Firdous AhmadNo ratings yet
- 62 TRIGONOMETRIC RATIO - IDENTITY PART 1 of 2Document11 pages62 TRIGONOMETRIC RATIO - IDENTITY PART 1 of 2Akshit KhuranaNo ratings yet
- Permutations-And-CombinationsDocument23 pagesPermutations-And-CombinationsAtlas CerboNo ratings yet
- Lesson 9 - Solving Quadratic EquationsDocument22 pagesLesson 9 - Solving Quadratic EquationsPiNo ratings yet
- Maths 2016-17AB PDFDocument49 pagesMaths 2016-17AB PDFKishore ReddyNo ratings yet
- Republic of The Philippines Department of Education Region IV-A (CALABARZON) Simona National High School Mathematics 7 (1 Periodical Exam)Document7 pagesRepublic of The Philippines Department of Education Region IV-A (CALABARZON) Simona National High School Mathematics 7 (1 Periodical Exam)Ruben Pulumbarit IIINo ratings yet
- P3 Chapter 3 Trigonometric FunctionsDocument38 pagesP3 Chapter 3 Trigonometric FunctionsemdyoverdriveNo ratings yet
- My Final ThesisDocument13 pagesMy Final ThesisCindy BononoNo ratings yet
- The Uses and Abuses of The History of Topos TheoryDocument25 pagesThe Uses and Abuses of The History of Topos TheorybleximNo ratings yet
- Adding or Subtracting Fractions With Different Denominators: Evaluate Each ExpressionDocument3 pagesAdding or Subtracting Fractions With Different Denominators: Evaluate Each ExpressionsajeevNo ratings yet
- Factoring of Prime Ideals in ExtensionsDocument9 pagesFactoring of Prime Ideals in ExtensionsAhmed SamirNo ratings yet
- Bicknell1 A Primer For The Fibonacci Number Part IXDocument8 pagesBicknell1 A Primer For The Fibonacci Number Part IXCeiba GrooveNo ratings yet
- Module 6Document41 pagesModule 6Laika EnriquezNo ratings yet
- SP Maths Basic 30 UnsolvedDocument8 pagesSP Maths Basic 30 UnsolvedgovidaswamygNo ratings yet
- Jinx Katana MA-214-HW2Document3 pagesJinx Katana MA-214-HW2Sarah WiseNo ratings yet
- Abstract AlgebraDocument15 pagesAbstract AlgebraIt'z Hunny100% (1)
- Adobe Scan 02 Mar 2023Document24 pagesAdobe Scan 02 Mar 2023Qurat Ul Ain TariqNo ratings yet
- Advanced Linear Algebra With Applications - Mohammad Ashraf & Vincenzo de Filippis & Mohammad Aslam SiddeequeDocument504 pagesAdvanced Linear Algebra With Applications - Mohammad Ashraf & Vincenzo de Filippis & Mohammad Aslam Siddeequealfonso heviaNo ratings yet
- Math 9Document2 pagesMath 9wendang0202No ratings yet
- Analysis of A Complex Kind: Week 1Document11 pagesAnalysis of A Complex Kind: Week 1Kofi Appiah-DanquahNo ratings yet
- Rational Numbers Rational Numbers Rational Numbers Rational Numbers Rational NumbersDocument32 pagesRational Numbers Rational Numbers Rational Numbers Rational Numbers Rational NumbersAjiteshPadda100% (1)
- Solving Quadratic Equations Using The Quadratic Formula: N N X XDocument2 pagesSolving Quadratic Equations Using The Quadratic Formula: N N X XMary Anne Joy CaroNo ratings yet
- Bai Tap Day SoDocument14 pagesBai Tap Day Sonam hoàngNo ratings yet
- Damath RulesDocument10 pagesDamath RulesJoloNo ratings yet
- From Pythagoras To Einstein: M The Hyperbolic Pythagorean TheoreDocument31 pagesFrom Pythagoras To Einstein: M The Hyperbolic Pythagorean TheorejunaidNo ratings yet