Project VTU
Project VTU
Download as rtf, pdf, or txt
You might also like
- Mechatronics System Design - 21me642 - All 5 Module NotesDocument92 pagesMechatronics System Design - 21me642 - All 5 Module Notesankitgowda74No ratings yet
- Designing High-Density CitiesDocument385 pagesDesigning High-Density CitiesLaura Poenar100% (3)
- Electromagnetic Emission Measurement Prediction of Buck Boost Converter Circuits Using Machine Learning MethodsDocument22 pagesElectromagnetic Emission Measurement Prediction of Buck Boost Converter Circuits Using Machine Learning MethodsHasan YahyaogluNo ratings yet
- Static Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALDocument8 pagesStatic Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALjssrikantamurthyNo ratings yet
- Syllabus of MA 131 MATHEMATICS - I of BE of Anna University - 2001 Regulation PDFDocument2 pagesSyllabus of MA 131 MATHEMATICS - I of BE of Anna University - 2001 Regulation PDFpreetha prabhuramNo ratings yet
- UNIT 3: Electro-Rheological and Magneto Rheological Fluids: ViscoelasticDocument8 pagesUNIT 3: Electro-Rheological and Magneto Rheological Fluids: Viscoelasticmohammed kamrankaleemNo ratings yet
- Introduction To MEMSDocument56 pagesIntroduction To MEMSsantosh kumarNo ratings yet
- Units 7 MemsDocument12 pagesUnits 7 Memsvishnu patilNo ratings yet
- Smart MaterialsDocument26 pagesSmart MaterialsManoj JaiswalNo ratings yet
- IV I Mech Mems (Open Elective-R13)Document2 pagesIV I Mech Mems (Open Elective-R13)Aboobakker SidhiqueNo ratings yet
- Mechanics of Machines IntroDocument48 pagesMechanics of Machines IntroYuvraj Singh100% (1)
- 15ME745 Module 1 NotesDocument20 pages15ME745 Module 1 NotesYOGANANDA B SNo ratings yet
- GATE Engineering Mathematics MaterialDocument17 pagesGATE Engineering Mathematics Materialmanoj kaushikNo ratings yet
- MODULE 1 Introduction, Shape Memory Alloys PDFDocument50 pagesMODULE 1 Introduction, Shape Memory Alloys PDFSANTHOSH NAGARAJANo ratings yet
- Engineering Metrology & Measurements NotesDocument48 pagesEngineering Metrology & Measurements NotesJeevanandam Shanmuga100% (1)
- Important Topics For GATEDocument4 pagesImportant Topics For GATEMyameSirameNo ratings yet
- Mechatronics EngineeringDocument2 pagesMechatronics Engineeringsandysubash100% (1)
- Smart Materials and StructursDocument2 pagesSmart Materials and StructursDaniel AntonyNo ratings yet
- Basics of MATLAB.Document133 pagesBasics of MATLAB.srefhydscfgfvbNo ratings yet
- Metrology Course Oulines.10batchDocument4 pagesMetrology Course Oulines.10batchTariq AslamNo ratings yet
- Measurement of Force, Torque and Shaft PowerDocument12 pagesMeasurement of Force, Torque and Shaft PowermirztrNo ratings yet
- AIMTDR BrochureDocument6 pagesAIMTDR Brochurekachu0408No ratings yet
- Plane Curvilinear Motion:: DisplacementDocument18 pagesPlane Curvilinear Motion:: Displacementyalexca100% (1)
- Hybrid Electric and Fuel Cell Vehicles PDFDocument7 pagesHybrid Electric and Fuel Cell Vehicles PDFmeet patelNo ratings yet
- VTU PHD RegulationsDocument2 pagesVTU PHD RegulationstkthriveniNo ratings yet
- Proceedings of National Seminar On Etdg-12Document189 pagesProceedings of National Seminar On Etdg-12Ayush SagarNo ratings yet
- Seminar Presentatio NON Cybernetics: BY: Shashank Shekhar Yadav ROLL NO.: 1312240193 ME - 86Document15 pagesSeminar Presentatio NON Cybernetics: BY: Shashank Shekhar Yadav ROLL NO.: 1312240193 ME - 86ShashankNo ratings yet
- Basics of Semiconductor Materials - With NotesDocument57 pagesBasics of Semiconductor Materials - With Notesgourishetty_raveesh100% (1)
- Mechatronics - Unit 5 - NotesDocument13 pagesMechatronics - Unit 5 - NotesDulce DeNo ratings yet
- Particles - Kinematics and KineticsDocument249 pagesParticles - Kinematics and KineticsMinh Vu100% (1)
- Final Phase 1 PPT Major ProjectDocument21 pagesFinal Phase 1 PPT Major ProjectSpandana priyaNo ratings yet
- 4.3 TRB Polytechnic Syllabus PDFDocument45 pages4.3 TRB Polytechnic Syllabus PDFAnonymous WCSYkPp100% (9)
- BE Mechatronics 2015Document364 pagesBE Mechatronics 2015VIGNESH RAJ MNo ratings yet
- Electric CircuitsDocument15 pagesElectric CircuitsArpit RajpootNo ratings yet
- MEMSDocument21 pagesMEMSAppu Kumar67% (6)
- AEC361 2019 Question BankDocument10 pagesAEC361 2019 Question BankVenky GollavelliNo ratings yet
- Automobile EngineeringDocument32 pagesAutomobile EngineeringDax ShuklaNo ratings yet
- Basic Electricals Engg. 15ele15 Notes PDFDocument135 pagesBasic Electricals Engg. 15ele15 Notes PDFAbhay KumarNo ratings yet
- Control System Lecture PlanDocument3 pagesControl System Lecture PlanGulzar AhamdNo ratings yet
- EMDocument227 pagesEMfaizu_ibmNo ratings yet
- Solar Photovoltaics: Fundamentals, Technology and ApplicationsDocument1 pageSolar Photovoltaics: Fundamentals, Technology and ApplicationspksahunitrklNo ratings yet
- Environmental Economics Pollution Control: Mrinal Kanti DuttaDocument253 pagesEnvironmental Economics Pollution Control: Mrinal Kanti DuttashubhamNo ratings yet
- Important Questions - BPHYS102 - 202Document2 pagesImportant Questions - BPHYS102 - 202Kalki “.” Avatar.100% (1)
- Certificate For Ms. For - Feedback Form - Webinar On ... - PDFDocument1 pageCertificate For Ms. For - Feedback Form - Webinar On ... - PDFGajalakshmi AshokNo ratings yet
- Btech 2 Sem Engineering Physics Kas201t 2022Document2 pagesBtech 2 Sem Engineering Physics Kas201t 2022Neelam SinghNo ratings yet
- Lattice VibrationsDocument10 pagesLattice VibrationsAli khan7No ratings yet
- UntitledDocument383 pagesUntitledOppo Neo7No ratings yet
- CL1101 Advanced Structural Mechanics - 03092014 - 010435PMDocument1 pageCL1101 Advanced Structural Mechanics - 03092014 - 010435PMwasim raza jamaniNo ratings yet
- Introduction To Mechanics (B.SC) Engineering Mechanics Ch04 - KinematicsDocument17 pagesIntroduction To Mechanics (B.SC) Engineering Mechanics Ch04 - KinematicsSaherNo ratings yet
- 12EE2603 - Power Electronics: Department of Electrical and Electronics EngineeringDocument72 pages12EE2603 - Power Electronics: Department of Electrical and Electronics EngineeringMurughesh MurughesanNo ratings yet
- B.e.eee Syllabus Reg 2017Document145 pagesB.e.eee Syllabus Reg 2017Infi Coaching CenterNo ratings yet
- Fictitious ForceDocument273 pagesFictitious ForceBadri NathNo ratings yet
- Narayana MainsDocument2 pagesNarayana Mainshrishi0000No ratings yet
- ETME 2011 e Proceeding Proc. of The 4th National Conference On Emerging Trends in Mechanical Engineering, March 18 19, 2011Document375 pagesETME 2011 e Proceeding Proc. of The 4th National Conference On Emerging Trends in Mechanical Engineering, March 18 19, 2011rip111176No ratings yet
- CL141 Engineering Mechanics Laboratory Manual: First Year B.Tech. (CL/ME/EE)Document64 pagesCL141 Engineering Mechanics Laboratory Manual: First Year B.Tech. (CL/ME/EE)Abdul RehmanNo ratings yet
- Study Materials - Sensors Based On HBLS SMDocument19 pagesStudy Materials - Sensors Based On HBLS SMKandasamy AsohanNo ratings yet
- Unit 1. Fundamentals of Design Master b5Document20 pagesUnit 1. Fundamentals of Design Master b5S VNo ratings yet
- Agni College of Technology: Office of Examcell Model ExamDocument3 pagesAgni College of Technology: Office of Examcell Model ExamohmshankarNo ratings yet
- Nonlinear Dynamic in Engineering by Akbari-Ganji’S MethodFrom EverandNonlinear Dynamic in Engineering by Akbari-Ganji’S MethodNo ratings yet
- 1) Powder Blender. 2) Die Used For Compaction. 3) Sintering FurnaceDocument4 pages1) Powder Blender. 2) Die Used For Compaction. 3) Sintering FurnacesameekshaNo ratings yet
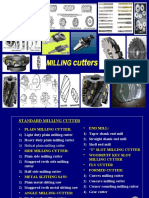
- Millng CutterDocument49 pagesMillng CuttersameekshaNo ratings yet
- E & E Module 3Document62 pagesE & E Module 3sameekshaNo ratings yet
- Duster Dusting MachineDocument3 pagesDuster Dusting MachinesameekshaNo ratings yet
- Buiscuit AutomationDocument3 pagesBuiscuit AutomationsameekshaNo ratings yet
- Port Said University Faculty of Engineering. Mech. Power Eng. Dept. Energy Resources 3 Year Mechanical Power Eng. Dept. Sheet No. (6) : Solar EnergyDocument2 pagesPort Said University Faculty of Engineering. Mech. Power Eng. Dept. Energy Resources 3 Year Mechanical Power Eng. Dept. Sheet No. (6) : Solar EnergyMohamed HammamNo ratings yet
- Department of Education: A Hybridized Solar Piezoelectric Power GeneratorDocument23 pagesDepartment of Education: A Hybridized Solar Piezoelectric Power GeneratorMatthew VillarosaNo ratings yet
- Solar Dryers PDFDocument313 pagesSolar Dryers PDFjustorfcNo ratings yet
- Photovoltaic Module Monocrystalline120 Polycrown Solar: Key FeaturesDocument2 pagesPhotovoltaic Module Monocrystalline120 Polycrown Solar: Key FeaturesPetre TaraipanNo ratings yet
- Self Cooling BuildingDocument41 pagesSelf Cooling BuildingSubham Paul100% (1)
- Conference - Trias For TheoryDocument6 pagesConference - Trias For TheoryPiti AnontaNo ratings yet
- Photovoltaics PDFDocument194 pagesPhotovoltaics PDFAbu MariamNo ratings yet
- These 5 Awesome Innovations Are Saving Planet EarthDocument4 pagesThese 5 Awesome Innovations Are Saving Planet EarthHannah Mitzi A. QuiawanNo ratings yet
- 2014 Book HarnessingSolarHeatDocument271 pages2014 Book HarnessingSolarHeatAxel GomezNo ratings yet
- AICTEDocument85 pagesAICTETAIYABA FATHIMANo ratings yet
- GNM Vol I Community Health Nursing Part 2 MinDocument451 pagesGNM Vol I Community Health Nursing Part 2 MinVarsha ChudasmaNo ratings yet
- Costruction Planning and Control: 1 MW Solar Power Plant Installation Project Scheduling and TrackingDocument12 pagesCostruction Planning and Control: 1 MW Solar Power Plant Installation Project Scheduling and TrackingMohamed MoatazNo ratings yet
- Fiche UrbasolarDocument2 pagesFiche UrbasolarFarooq MizaNo ratings yet
- Solar Vender ListDocument6 pagesSolar Vender ListWe are codderNo ratings yet
- Net Zero Energy Building (Nzeb) : Priya .A. Betageri 1RW19AT072 V Sem B' SecDocument10 pagesNet Zero Energy Building (Nzeb) : Priya .A. Betageri 1RW19AT072 V Sem B' SecIMRAN KHANNo ratings yet
- Typical Primary Health Center Solar SolutionDocument2 pagesTypical Primary Health Center Solar Solutionpeter LamurenNo ratings yet
- Sources of EnergyDocument40 pagesSources of EnergyTawsiful AlamNo ratings yet
- ĐỀ 1Document3 pagesĐỀ 1Nguyễn Tùng MinhNo ratings yet
- Sol 23 1227Document23 pagesSol 23 1227rsiddharth2008No ratings yet
- Eth 46804 02 1Document200 pagesEth 46804 02 1Drofer ConcepcionNo ratings yet
- 5kW On Grid Solar System Price With Subsidy SchemeDocument2 pages5kW On Grid Solar System Price With Subsidy SchemeAruna ReddyNo ratings yet
- Mock Test 1 (Đề Thi Vào Lớp 10 Sở Gd Và Đt Thanh Hóa 2021)Document4 pagesMock Test 1 (Đề Thi Vào Lớp 10 Sở Gd Và Đt Thanh Hóa 2021)Thùy DươngNo ratings yet
- Temperature and HeatDocument23 pagesTemperature and HeatAlessia BostiogNo ratings yet
- Mock Test 5Document4 pagesMock Test 5thuylinh canNo ratings yet
- Solar Power Monitoring SystemDocument8 pagesSolar Power Monitoring SystemDebayani MishraNo ratings yet
- Renewable and Sustainable Energy Reviews: David B. RichardsonDocument8 pagesRenewable and Sustainable Energy Reviews: David B. Richardsoneng_alhemyariNo ratings yet
- (1 Main) Bunea - Mathematical Modelling of Unglazed Solar Collectors Under Extreme Operating ConditionsDocument15 pages(1 Main) Bunea - Mathematical Modelling of Unglazed Solar Collectors Under Extreme Operating ConditionsbulutysnNo ratings yet
- 2019 Winter Model Answer Paper (Msbte Study Resources)Document20 pages2019 Winter Model Answer Paper (Msbte Study Resources)Siddharth VavhalNo ratings yet
- HNU Today - Issue 2 2015Document13 pagesHNU Today - Issue 2 2015Holy Names UniversityNo ratings yet