Unit I
Unit I
Download as pdf or txt
You might also like
- Test Bank Questions Chapter 5Document5 pagesTest Bank Questions Chapter 5Anonymous 8ooQmMoNs1No ratings yet
- Datamine Studio Excel Database Guide (In English)Document8 pagesDatamine Studio Excel Database Guide (In English)Sergo Cusiani100% (1)
- EE2253 - Control SystemsDocument124 pagesEE2253 - Control SystemsrameshsmeNo ratings yet
- Cse Unit 1Document8 pagesCse Unit 1vishweshwar vishwaNo ratings yet
- Unit-1 NotesDocument43 pagesUnit-1 NotesMD SHAHRIARMAHMUDNo ratings yet
- EE2253 NotesDocument124 pagesEE2253 NotesSiva Kathikeyan100% (1)
- Ec2255 - Control SystemDocument42 pagesEc2255 - Control Systemselvi0412No ratings yet
- Ec2255 - Control SystemDocument42 pagesEc2255 - Control SystemK.RajkumarNo ratings yet
- EC3351 Control Systems Lecture Notes 1Document144 pagesEC3351 Control Systems Lecture Notes 1batmanbeginss07No ratings yet
- Unit No - II: Block Diagram RepresentationDocument56 pagesUnit No - II: Block Diagram RepresentationNamrta DeokateNo ratings yet
- Unit I NotesDocument43 pagesUnit I Notesaravinth69601No ratings yet
- Linear Control System: Presented by Imran Basha SyedDocument35 pagesLinear Control System: Presented by Imran Basha SyedSyed Imran BashaNo ratings yet
- Control SystemDocument45 pagesControl SystempriscillaNo ratings yet
- Control Systems - LECTURE NOTESDocument132 pagesControl Systems - LECTURE NOTESgutha manikantaNo ratings yet
- Adum 9 ZGIK4 BDX FQN EQL4 Uiee ST SSLJK 1 ZHBVV JF GDocument198 pagesAdum 9 ZGIK4 BDX FQN EQL4 Uiee ST SSLJK 1 ZHBVV JF Gvs8784k2kpNo ratings yet
- Me55 Control Engineering (Common To ME/IP/MA/AU) Sub Code: ME55 IA Marks: 25 Hrs/Week: 04 Exam Hours: 03 Total HRS.: 52 Exam Marks:100Document7 pagesMe55 Control Engineering (Common To ME/IP/MA/AU) Sub Code: ME55 IA Marks: 25 Hrs/Week: 04 Exam Hours: 03 Total HRS.: 52 Exam Marks:100Manasa Sathyanarayana SNo ratings yet
- Control Systems NotesDocument152 pagesControl Systems Notesdarlachantisaideepthi450No ratings yet
- Ece IV Control Systems (10es43) Notes1Document205 pagesEce IV Control Systems (10es43) Notes1Nithindev GuttikondaNo ratings yet
- Pe-3032 WK 1 Introduction To Control System March 04Document70 pagesPe-3032 WK 1 Introduction To Control System March 04Charlton S.Inao100% (2)
- ECE 331 Complete NotesDocument129 pagesECE 331 Complete NotespolygatoneoderaNo ratings yet
- Control Engineering: Types of Control SystemsDocument26 pagesControl Engineering: Types of Control SystemsGilbert SigalaNo ratings yet
- Control Systems NotesDocument133 pagesControl Systems Noteseee limatNo ratings yet
- W EE 418 - Lecture 1 Overview and IntroductionDocument56 pagesW EE 418 - Lecture 1 Overview and IntroductionGGAP LASTNo ratings yet
- Control SystemsDocument96 pagesControl SystemsDr. Gollapalli NareshNo ratings yet
- Control Systems NotesDocument50 pagesControl Systems NotesEEE CRRNo ratings yet
- Pe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01Document69 pagesPe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01OkingszackNo ratings yet
- Eee IV Control Systems 10es43 Notes PDFDocument124 pagesEee IV Control Systems 10es43 Notes PDFKiranjith KrishnanNo ratings yet
- Mechatronics NotesDocument90 pagesMechatronics NotesSanskar AgrawalNo ratings yet
- Contyrol Systems Revision-1-1Document33 pagesContyrol Systems Revision-1-1generaliemmanuel1No ratings yet
- Control Systems NotesDocument125 pagesControl Systems Notessandra ambicaNo ratings yet
- CONTRO System SubjectDocument46 pagesCONTRO System Subjectbhavishetty2No ratings yet
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinNo ratings yet
- Unit I: Fundamentals of Control System: Lecturer: D. R. PardeshiDocument18 pagesUnit I: Fundamentals of Control System: Lecturer: D. R. PardeshiDnyaneshwar RajputNo ratings yet
- Control Systems 1Document130 pagesControl Systems 1ndunguian66No ratings yet
- Control Systems Typed NotesDocument129 pagesControl Systems Typed Notesta003744No ratings yet
- Control Systems NotesDocument74 pagesControl Systems NotesNirjal RanipaNo ratings yet
- Control Systems Two Marks QuestionDocument41 pagesControl Systems Two Marks QuestionSk WajuddinNo ratings yet
- Control Engineering PDFDocument164 pagesControl Engineering PDFsanthoshramrNo ratings yet
- EEE 757 Linear Control SystemsDocument14 pagesEEE 757 Linear Control SystemsOkomgboeso JudeNo ratings yet
- EE2253 - Control Systems PDFDocument124 pagesEE2253 - Control Systems PDFaduveyNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- Control Engineering: 2 Marks Questions & AnswersDocument16 pagesControl Engineering: 2 Marks Questions & AnswersLakshumaiah Majjari100% (1)
- Controlsystem Unit 1Document309 pagesControlsystem Unit 1pullagura sowmyaNo ratings yet
- Cpe 315 Feedback Control System LessonsDocument28 pagesCpe 315 Feedback Control System Lessonskeny amigableNo ratings yet
- Class 2 Classification of Control Systems With ExemplesDocument31 pagesClass 2 Classification of Control Systems With ExemplesAcharya Mascara PlaudoNo ratings yet
- Title: Introduction To Control System and Their Real Life Application and ExamplesDocument4 pagesTitle: Introduction To Control System and Their Real Life Application and ExampleskalimullahNo ratings yet
- Control Systems Notes DEE M2 JuneDocument34 pagesControl Systems Notes DEE M2 JuneThairu MuiruriNo ratings yet
- controlICS CH1Document5 pagescontrolICS CH1Magarsaa Qana'iiNo ratings yet
- Unit I Control Engineering MaterialDocument103 pagesUnit I Control Engineering MaterialBommisetty Hema MallikaNo ratings yet
- CS Lecture Notes Units 1 2 3Document88 pagesCS Lecture Notes Units 1 2 3sushinkNo ratings yet
- Industrial Control Chapter 1Document19 pagesIndustrial Control Chapter 1Qayyum AqasyahNo ratings yet
- Module 1 MergedDocument209 pagesModule 1 MergedDivyansh JainNo ratings yet
- Module - 1 - Control SystemDocument25 pagesModule - 1 - Control SystemRonitNo ratings yet
- Control System EngineeringDocument125 pagesControl System Engineeringcüneyt şanNo ratings yet
- LabExercise 9 - Dynamic Systems SimulationDocument16 pagesLabExercise 9 - Dynamic Systems SimulationQueenie Rose PercilNo ratings yet
- Control System EngineeringDocument95 pagesControl System EngineeringAbdulrahmanNo ratings yet
- Sistemas Automáticos de ControlDocument47 pagesSistemas Automáticos de ControlMiguel Sebastian Rincon OrtegaNo ratings yet
- Control System Engineering Questions and AnswersDocument7 pagesControl System Engineering Questions and AnswersYassir Owange100% (1)
- Consumer Behaviour and Utility Maximisation: Utility Theory of Utility Measurement. - Consumers' Satisfaction IsDocument5 pagesConsumer Behaviour and Utility Maximisation: Utility Theory of Utility Measurement. - Consumers' Satisfaction IsnelsNo ratings yet
- Advanced Level Trigonometry TutorialDocument15 pagesAdvanced Level Trigonometry TutorialbjNo ratings yet
- Exclusive Topics: Class 1 To Class 12 Circle Geometry Class VI To X Industry Sector AnalysisDocument4 pagesExclusive Topics: Class 1 To Class 12 Circle Geometry Class VI To X Industry Sector AnalysisamitjustamitNo ratings yet
- Computational Welding Simulation of A Plasma Wire Arc Additive Manufacturing Process For High-Strength SteelDocument16 pagesComputational Welding Simulation of A Plasma Wire Arc Additive Manufacturing Process For High-Strength Steelwemerson.backup1995No ratings yet
- Poisson TableDocument3 pagesPoisson TablecfowleNo ratings yet
- A Student Guide To Writing Proofs in Latex: Discrete Mathematics - Spring 2022Document8 pagesA Student Guide To Writing Proofs in Latex: Discrete Mathematics - Spring 2022Péter NguyenNo ratings yet
- Examiners' Report/ Principal Examiner Feedback January 2014Document8 pagesExaminers' Report/ Principal Examiner Feedback January 2014ktyasirNo ratings yet
- Structural Steel DesignDocument21 pagesStructural Steel DesignMahmoud El-Kateb100% (1)
- Chapter 5Document76 pagesChapter 5francesaishamagpocNo ratings yet
- Chapter 6: User-Defined Functions I: Programming For Engineers 1Document33 pagesChapter 6: User-Defined Functions I: Programming For Engineers 1AbdelrahmanJamalNo ratings yet
- NCERT Solutions For Class 11 Physics Chapter 4 - Laws of Motion PDFDocument29 pagesNCERT Solutions For Class 11 Physics Chapter 4 - Laws of Motion PDFrickgormann95No ratings yet
- Assignment 2Document3 pagesAssignment 2sheena RomNo ratings yet
- ModeDocument21 pagesModegovindaraj gkNo ratings yet
- CPP - Vectors (Xii)Document9 pagesCPP - Vectors (Xii)Arun SharmaNo ratings yet
- A Comparative Review of Robot Programming LanguagesDocument30 pagesA Comparative Review of Robot Programming LanguagesTrần Thu HuyềnNo ratings yet
- Higher MathsDocument48 pagesHigher Mathsdivya185No ratings yet
- Roots of Nonlinear EquationsDocument14 pagesRoots of Nonlinear EquationsNabil FikriNo ratings yet
- Math Lesson Plan Template: Name: Sarah FitzgeraldDocument10 pagesMath Lesson Plan Template: Name: Sarah Fitzgeraldapi-379486262No ratings yet
- Moscow Phys Olym - 1986 2007 Compressed 1 250Document250 pagesMoscow Phys Olym - 1986 2007 Compressed 1 250jibanj119100% (1)
- PHYS 101 - General Physics I Midterm Exam 1: Duration: 120 Minutes Saturday, 11 March 2017, 14:00Document4 pagesPHYS 101 - General Physics I Midterm Exam 1: Duration: 120 Minutes Saturday, 11 March 2017, 14:00Mohammed AL-sharafiNo ratings yet
- 2.5 Modeling Real-World DataDocument17 pages2.5 Modeling Real-World DataKushagra TiwaryNo ratings yet
- CBSE Class 10 Maths 2017Document13 pagesCBSE Class 10 Maths 2017Vidyasagar MayanglambamNo ratings yet
- 8-5 Study Guide and Intervention: Using The Distributive PropertyDocument3 pages8-5 Study Guide and Intervention: Using The Distributive PropertyDiana SolanoNo ratings yet
- 7 SimplificationDocument3 pages7 SimplificationSanjay GuptaNo ratings yet
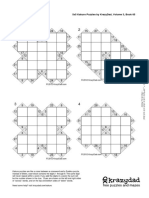
- KD Kakuro 5x5 v3 s2 b065Document3 pagesKD Kakuro 5x5 v3 s2 b065RADU GABINo ratings yet
- Preview: Gradient Based Histogram Equalization of Thermal Infrared ImagesDocument24 pagesPreview: Gradient Based Histogram Equalization of Thermal Infrared ImagesNguyễn DũngNo ratings yet
- Buckling 1-1 PDFDocument6 pagesBuckling 1-1 PDFFilip StojkovskiNo ratings yet
- Stochastic Calculus - An Introduction With Applications PDFDocument246 pagesStochastic Calculus - An Introduction With Applications PDFPatrickNo ratings yet