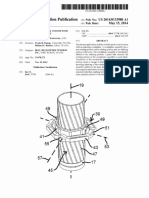
US4804352
US4804352
Download as pdf or txt
You might also like
- Hydrofoil Ship Design - W NeillDocument46 pagesHydrofoil Ship Design - W NeillGölfried GeorgeNo ratings yet
- Prop CurveDocument4 pagesProp CurveArun S100% (2)
- Voith Scheider Preopeller (VSP)Document31 pagesVoith Scheider Preopeller (VSP)pramodkb_cusat100% (2)
- United States PatentDocument13 pagesUnited States Patent155No ratings yet
- Hydrofoil - US5951162Document22 pagesHydrofoil - US5951162rwtoorresd100% (1)
- Slurry Reaction AgitatorsDocument10 pagesSlurry Reaction AgitatorsManoj BNo ratings yet
- US4735355Document25 pagesUS4735355Kartar SinghNo ratings yet
- US4103849Document5 pagesUS4103849Zhu LeeNo ratings yet
- US5275357Document12 pagesUS5275357LimingNo ratings yet
- Reducere Backlash Cremaliere 2Document10 pagesReducere Backlash Cremaliere 2IonescuTeodoraNo ratings yet
- Us 4883240Document16 pagesUs 4883240John SmithNo ratings yet
- Wind Turbine Brake Fayette US4715782Document9 pagesWind Turbine Brake Fayette US4715782Mariela TisseraNo ratings yet
- Us 6325586Document52 pagesUs 6325586Chaman KumarNo ratings yet
- Transmission Inertia Brake WithDocument10 pagesTransmission Inertia Brake Witholduren53100% (1)
- Us 4610182Document7 pagesUs 4610182rohaannn46No ratings yet
- US4632154 Weft Feeder For Weaving Looms PDFDocument6 pagesUS4632154 Weft Feeder For Weaving Looms PDFParikshit PaulNo ratings yet
- Disc TurbineDocument9 pagesDisc TurbineRonan RojasNo ratings yet
- Iiihiiih: United States PatentDocument33 pagesIiihiiih: United States PatentSebastian GuerraNo ratings yet
- US4624203Document11 pagesUS4624203524No ratings yet
- United States Patent (19) : 11 Patent Number: 5,072,729 45 Date of Patent: Dec. 17, 1991Document11 pagesUnited States Patent (19) : 11 Patent Number: 5,072,729 45 Date of Patent: Dec. 17, 1991Bareethul KaderNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument7 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentAaron LuoNo ratings yet
- US5584336Document13 pagesUS5584336Ashkan AsefiNo ratings yet
- PCB Helical Resonator and FilterDocument7 pagesPCB Helical Resonator and FilterbaymanNo ratings yet
- Antibacklash Gears Including Rack and Pinion GearsDocument11 pagesAntibacklash Gears Including Rack and Pinion GearsBrian KiddNo ratings yet
- United States Patent (19) : Meretsky Et Al. (11) 4,210,859Document17 pagesUnited States Patent (19) : Meretsky Et Al. (11) 4,210,859Pierre ClaudeNo ratings yet
- Serpentine Wind Turbine US6616402Document79 pagesSerpentine Wind Turbine US6616402Widji SlametNo ratings yet
- Us 4785300Document12 pagesUs 4785300MasoudNo ratings yet
- Mte CutawayDocument14 pagesMte CutawayMujeres Virglius PabliusNo ratings yet
- US5180284Document7 pagesUS5180284vishal pandeyNo ratings yet
- US4424884Document14 pagesUS4424884han09092001No ratings yet
- Diseño de Impulsores para Mezcla de SuspensionesDocument9 pagesDiseño de Impulsores para Mezcla de SuspensionesrwtoorresdNo ratings yet
- United States Patent (19) : Aerospatiale, FranceDocument7 pagesUnited States Patent (19) : Aerospatiale, Franceingeniomeca8800No ratings yet
- Uinl O: (12) Ulllted States Patent (10) Patent N0.: US 7,762,776 B2Document11 pagesUinl O: (12) Ulllted States Patent (10) Patent N0.: US 7,762,776 B2Surya Chala PraveenNo ratings yet
- Dual Rotor Wind Turbine PDFDocument9 pagesDual Rotor Wind Turbine PDFv7danielNo ratings yet
- United States Patent (10) Patent No.: US 7,188.478 B2: Bourgeois (45) Date of Patent: Mar. 13, 2007Document10 pagesUnited States Patent (10) Patent No.: US 7,188.478 B2: Bourgeois (45) Date of Patent: Mar. 13, 2007Mateus GaygerNo ratings yet
- Us 5976015Document6 pagesUs 5976015divyashhalpati136No ratings yet
- United States Patent (19) : TinkerDocument12 pagesUnited States Patent (19) : TinkerJoel AndradeNo ratings yet
- United States Patent (10) Patent No.: US 6,767,161 B1: 107, Pasadena, CA (US) 91105 Janet E. A: 19: Taberg OSRDocument12 pagesUnited States Patent (10) Patent No.: US 6,767,161 B1: 107, Pasadena, CA (US) 91105 Janet E. A: 19: Taberg OSRSpring SuperbNo ratings yet
- United States Patent (19) : 11 Patent Number: 45) Date of Patent: Jan. 7, 1997Document9 pagesUnited States Patent (19) : 11 Patent Number: 45) Date of Patent: Jan. 7, 1997Kaustubh PanchalNo ratings yet
- Perfil HeliceDocument22 pagesPerfil HeliceJuan Carlos Fernández LermoNo ratings yet
- United States Patent: Barger Et Al. (45) Date of Patent: Jun. 15, 2004Document39 pagesUnited States Patent: Barger Et Al. (45) Date of Patent: Jun. 15, 2004Gek CagatanNo ratings yet
- United States Patent (19) : GravelineDocument15 pagesUnited States Patent (19) : Graveline155No ratings yet
- US5465572Document8 pagesUS54655722021ume0229No ratings yet
- Us 4643047Document12 pagesUs 4643047alankaiyuenNo ratings yet
- US6276294Document12 pagesUS6276294Văn Hiếu NguyễnNo ratings yet
- Patente Camiao FerroviarioDocument8 pagesPatente Camiao FerroviarioJoao AmoraNo ratings yet
- US5455474Document16 pagesUS5455474naturist_medNo ratings yet
- United States Patent (19) 11 Patent Number: 5,474,257: Fisher Et Al. (45. Date of Patent: Dec. 12, 1995Document11 pagesUnited States Patent (19) 11 Patent Number: 5,474,257: Fisher Et Al. (45. Date of Patent: Dec. 12, 1995155No ratings yet
- US6450740Document7 pagesUS6450740Milan JovicicNo ratings yet
- US3810602Document15 pagesUS3810602Hossein Hosseini RadNo ratings yet
- ABB Lumnous Patent For Helical BafflesDocument12 pagesABB Lumnous Patent For Helical BafflesAtul SanghaviNo ratings yet
- United States Patent (10) Patent No.: Us 7,806,624 B2: Mclean Et Al. (45) Date of Patent: Oct. 5, 2010Document22 pagesUnited States Patent (10) Patent No.: Us 7,806,624 B2: Mclean Et Al. (45) Date of Patent: Oct. 5, 2010George ClooneyNo ratings yet
- United States Patent (19) : 73) Assignee: Newell Industries, Inc., San AntonioDocument15 pagesUnited States Patent (19) : 73) Assignee: Newell Industries, Inc., San AntonioEduardo Fernandez DazaNo ratings yet
- Us7871033 PDFDocument10 pagesUs7871033 PDFAmir BahramiNo ratings yet
- US7743601Document4 pagesUS7743601Alien GmpNo ratings yet
- United States Patent (10) Patent No.: US 6,453,528 B1Document9 pagesUnited States Patent (10) Patent No.: US 6,453,528 B1MahnooshNo ratings yet
- Us6415847 PDFDocument10 pagesUs6415847 PDFMuhammad UmerNo ratings yet
- United States PatentDocument10 pagesUnited States PatentendhylakausuNo ratings yet
- United States Patent (19) : Helderle Et AlDocument14 pagesUnited States Patent (19) : Helderle Et AlabodolkuhaaNo ratings yet
- Us5694768 GeDocument8 pagesUs5694768 GeSaraNo ratings yet
- Patent DocumentDocument14 pagesPatent Documentcmhg1982No ratings yet
- Wheel PWR GenerationDocument8 pagesWheel PWR GenerationAsad Ahmed KhanNo ratings yet
- US9868541 Tiltrotor Aircraft Having Journal Bearing Mounted Pylon AssembliesDocument23 pagesUS9868541 Tiltrotor Aircraft Having Journal Bearing Mounted Pylon AssembliesLimingNo ratings yet
- EP4011771B1 Pylon Conversion Actuator For Tiltrotor AircraftDocument21 pagesEP4011771B1 Pylon Conversion Actuator For Tiltrotor AircraftLimingNo ratings yet
- EP2796369A1 Spindle Mounted Tiltrotor Pylon With Fixed Engine ArrangementDocument19 pagesEP2796369A1 Spindle Mounted Tiltrotor Pylon With Fixed Engine ArrangementLimingNo ratings yet
- US6247667 Tiltrotor Aircraft Pylon Conversion SystemDocument10 pagesUS6247667 Tiltrotor Aircraft Pylon Conversion SystemLimingNo ratings yet
- CN102167156B 自适应扭转的桨叶和设有此种桨叶的旋翼Document15 pagesCN102167156B 自适应扭转的桨叶和设有此种桨叶的旋翼LimingNo ratings yet
- US20220200383A1 Electric Motor For Aircraft PropulsionDocument22 pagesUS20220200383A1 Electric Motor For Aircraft PropulsionLimingNo ratings yet
- Manufacturing of Composite Grid StructuresDocument32 pagesManufacturing of Composite Grid StructuresLimingNo ratings yet
- US20220267025A1 Pylon Tracking Systems For Tiltrotor AircraftDocument17 pagesUS20220267025A1 Pylon Tracking Systems For Tiltrotor AircraftLimingNo ratings yet
- CN102317155B 刚性平面的旋翼构型Document15 pagesCN102317155B 刚性平面的旋翼构型LimingNo ratings yet
- Us8371532 PDFDocument12 pagesUs8371532 PDFLimingNo ratings yet
- CN102673781B 为桨叶系统提供挠性的组件Document20 pagesCN102673781B 为桨叶系统提供挠性的组件LimingNo ratings yet
- CN103373467B 用于直升飞机无轴承旋翼的桨叶附连件Document14 pagesCN103373467B 用于直升飞机无轴承旋翼的桨叶附连件LimingNo ratings yet
- CN101903240B 旋翼叶片及其制造方法Document11 pagesCN101903240B 旋翼叶片及其制造方法LimingNo ratings yet
- CN101484357B 包括两个横向接合的吸收推进力的侧连杆的飞行器发动机悬挂装置Document19 pagesCN101484357B 包括两个横向接合的吸收推进力的侧连杆的飞行器发动机悬挂装置LimingNo ratings yet
- CN100500514C 航空器发动机连接件以及用于航空器的组件Document20 pagesCN100500514C 航空器发动机连接件以及用于航空器的组件LimingNo ratings yet
- EP0744338A1Document16 pagesEP0744338A1LimingNo ratings yet
- CN103802337B 复合半径填料及其形成方法Document30 pagesCN103802337B 复合半径填料及其形成方法LimingNo ratings yet
- CN101484359B 包括安装在两个不同部件上的接口空气动力学整流罩的用于飞行器的发动机组件Document18 pagesCN101484359B 包括安装在两个不同部件上的接口空气动力学整流罩的用于飞行器的发动机组件LimingNo ratings yet
- EP0564126A1Document15 pagesEP0564126A1LimingNo ratings yet
- EP1539573B1Document21 pagesEP1539573B1LimingNo ratings yet
- CA2658847A1Document20 pagesCA2658847A1LimingNo ratings yet
- Determination of The Structural Properties of Helicopter Rotor BladesDocument20 pagesDetermination of The Structural Properties of Helicopter Rotor BladesLimingNo ratings yet
- US3279721Document8 pagesUS3279721LimingNo ratings yet
- US20140133980A1Document12 pagesUS20140133980A1LimingNo ratings yet
- US9347487Document12 pagesUS9347487LimingNo ratings yet
- US20110274550A1Document9 pagesUS20110274550A1LimingNo ratings yet
- CN105156470BDocument19 pagesCN105156470BLimingNo ratings yet
- US10640205Document14 pagesUS10640205LimingNo ratings yet
- US20180327086A1Document13 pagesUS20180327086A1LimingNo ratings yet
- US10450060Document13 pagesUS10450060LimingNo ratings yet
- On The Development of A New-Series Propeller For High-Speed CraftsDocument9 pagesOn The Development of A New-Series Propeller For High-Speed CraftsChien Manh NguyenNo ratings yet
- AT2000 PCS QuickDocument18 pagesAT2000 PCS QuickJuan Carlos ZavalaNo ratings yet
- FRH FRG ManualDocument23 pagesFRH FRG ManualdlanorxNo ratings yet
- SI-64-8 R1Document16 pagesSI-64-8 R1Ray Adrian CalinawanNo ratings yet
- IJMTE PaperDocument5 pagesIJMTE PapersaikumarNo ratings yet
- 00 MaintenanceDocument145 pages00 MaintenanceBeary McBearyNo ratings yet
- Preliminary Design of A Small Unmanned Battery 3570581 - Peukert - VoltageDocument12 pagesPreliminary Design of A Small Unmanned Battery 3570581 - Peukert - Voltageumunera2997No ratings yet
- A RANS-based Analysis Ool For Ducted Propeller Systems in Open Water ConditionDocument23 pagesA RANS-based Analysis Ool For Ducted Propeller Systems in Open Water ConditionLeonardo Duarte MilfontNo ratings yet
- 3a. Isi-B. Survey Dan Cara Pemeriksaan Kapal-31-55Document25 pages3a. Isi-B. Survey Dan Cara Pemeriksaan Kapal-31-55MuhammadRiady100% (1)
- Ship Construction 2020Document108 pagesShip Construction 2020Cap Karim ElSherbini100% (3)
- Hovercraft Seminar ReportDocument18 pagesHovercraft Seminar ReportArshad Karanath MHNo ratings yet
- HovercraftDocument20 pagesHovercraftManoj KumarNo ratings yet
- Cinema TicsDocument40 pagesCinema TicsAlexandru Precup0% (1)
- Blade PDFDocument2 pagesBlade PDFMunyaradzi MarizaniNo ratings yet
- Fish Friendly Turbines - YRC PresentationDocument13 pagesFish Friendly Turbines - YRC PresentationGaftoi Daniel AndreiNo ratings yet
- Review of Propeller-Wing Aerodynamic InterferenceDocument21 pagesReview of Propeller-Wing Aerodynamic Interferencekrishnamoorthy_krishNo ratings yet
- Lateral Propeller Forces and Their Effects On Shaft BeDocument7 pagesLateral Propeller Forces and Their Effects On Shaft BeAlfredo Ortiz BocanegraNo ratings yet
- Toroidal propUS467323Document3 pagesToroidal propUS467323Silver TwosilverNo ratings yet
- Mercury Gear Case ComponentsDocument43 pagesMercury Gear Case Componentswguenon100% (1)
- Assembly and Operation Manual: AQUZ1004 For AQUB43 V1.0Document24 pagesAssembly and Operation Manual: AQUZ1004 For AQUB43 V1.0GodsniperNo ratings yet
- Design & Fabrication of A Portable Mixer For Low Viscosity FluidsDocument34 pagesDesign & Fabrication of A Portable Mixer For Low Viscosity FluidsmohtasimNo ratings yet
- Roncuzzi - PAE - Presentación General PDFDocument8 pagesRoncuzzi - PAE - Presentación General PDFIvan RamirezNo ratings yet
- Practical Design of Control SurfaceDocument40 pagesPractical Design of Control SurfaceRyder SahithNo ratings yet
- Drive ShaftsDocument13 pagesDrive Shaftsjeanmidany354No ratings yet
- Internal Gear PumpDocument8 pagesInternal Gear Pumpshivam.nagarNo ratings yet
- Catálogo Michigan 2020Document104 pagesCatálogo Michigan 2020teopol2No ratings yet