ミール【(ロシア)mir】
ミール【Mir/Мір】
ミール

名称:ミール(MIR)
開発機関・会社:ソ連科学アカデミー/ロシア宇宙庁(RKA)(現 ロシア航空宇宙庁/Rosaviakosmos)
運用機関・会社:ソ連科学アカデミー/ロシア宇宙庁(RKA)(現 ロシア航空宇宙庁/Rosaviakosmos)
打ち上げ年月日:1986年2月20日ミール本体打ち上げ(有人運用1986年3月13日~)/1987年4月5日クバント1、ドッキング(本格運用1987年4月12日~)/1989年12月6日クバント2、ドッキング/1990年7月10日クリスタル、ドッキング/1995年6月1日スペクトル、ドッキング/1995年11月15日シャトル・ミール用ドッキング・モジュール/1996年4月26日プリローダ、ドッキング
運用終了年月日:2001年3月23日
打ち上げ国名・機:ロシア(CIS)・旧ソ連/ソ連科学アカデミー/ロシア宇宙庁(RKA)(現 ロシア航空宇宙庁/Rosaviakosmos)
打ち上げロケット:プロトンK/スペースシャトル
ミールは、国内の政変の影響を受けて、その存在もあぶなくなったソ連の宇宙開発機構が、最後に残した、未来への希望でした。
もっとも、中心部となるミール・モジュールそのものは、先行するサリュート6号やサリュート7号と構造的にあまり変わっていません。大きな違いは、サリュート6号、サリュート7号と同様の前後2つ、軸方向のドッキング・ポートに加えて、前方部から側面4方向にさらに4つの増設用ポートが加わったことです。あわせて5方向での結合が可能な、この球形区画のおかげで、サリュート本体(コア部)は、こけしのような特徴的な形状となっています。
この性能を利用することにより、有人の往還宇宙船や補給無人船とのドッキングに加え、ミールでは、さまざまな恒久的モジュールの増設が可能となりました。
ミール本体には、有人宇宙船(ソユーズTM)や無人補給船(プログレスM)をのぞいても6つのモジュールが結合しており、コア部の打ち上げ当時とは見違えるほどの外見と大きさになりました。
1995年2月のランデブー飛行につづき、6月にはスペースシャトル、アトランティスとのドッキングに成功。1995年11月には、同じくアトランティスにより、シャトル・ミールドッキング用のモジュールが運ばれ、来るべき国際宇宙ステーション計画の予行演習としての、スペースシャトルとの長期的な共同ミッションの態勢が整いました。
1998年6月までの間に、スペースシャトルとのドッキングは8回を数え、その後も宇宙飛行士の長期滞在が続けられました。これまで姿勢制御システム不調によるドッキング失敗、中央コンピューター故障などのトラブルに見舞われましたが、幸い人的被害はありませんでした。1999年8月にミールは無人となりました。その後、2001年 3月23日午後 3時00分(モスクワ時間2001年 3月23日午前 9時00分)に南緯40度、西経160度を中心とした海域に落下し、15年に渡る運用を終了しました。
1.スペースシャトルはどんな形をして、どんな性能を持っているの?
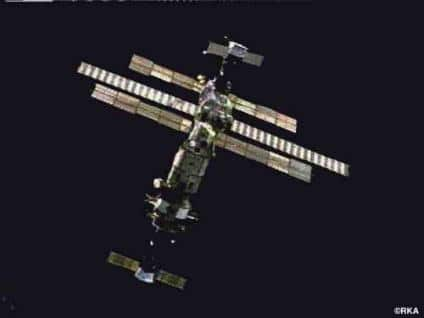
ミールは、帰還船となるソユーズTMや輸送船プログレスをのぞけば、本体コアを含めて7つのモジュールから構成されています。
それぞれのモジュールは、補給船との独自のドッキング・ポートを備えたクバントがコア部の後方に、前方側面方向には、時計回りにプリローダ、スペクトル、クリスタル、クバント2の各モジュールが接続され、クリスタルの先端にはさらに、シャトルとのドッキング用モジュールがつけ加えられています。本体前方、軸方向のポートはソユーズ有人宇宙船やプログレス無人輸送(補給)船とのドッキング用に確保されています。
本体のコア・モジュールは単体でも宇宙ステーションとして機能できるように、独自の居住空間、生命維持システム、それに太陽発電パネルを用いた動力システムを備えています。最大直径4.15m、全長13.13m、総重量20.4t、居住可能な与圧部の容積は90m3、3基、76m2の太陽発電パネルを備えています。
クバント(クバント1)は、1987年、コア部後方に増設された天体物理学研究のための望遠鏡など各種の観測機器と、姿勢制御システム、それに独自の生命維持システムを装備しています。内部は与圧された実験室区画と真空の機器区画とにわかれ、実験区画は作業用と居住用に使われています。コア部と反対側には、ソユーズやプログレスとのドッキング・ポートが設けられています。最大直径4.15m、全長5.8m、総重量11.5t。与圧部容積40m3で、2基の太陽発電パネルをそなえています。
クバント2は、1989年12月6日、まず、軸部にドッキング、2日後の12月8日に側面方向に移され、固定されました。クバント2には船外活動(EVA)用の機器やシステム、エアロックが装備され、ミールの運用能力を大きく高めました。また、生物学的研究や地球観測用の科学機器とともに、シャワーや洗濯帰飲み水の供給装置などが搭載されていました。最大直径4.35m、全長12.4m、総重量18.5tで、与圧部容積は61.3m3。2基、53m2の太陽電池パネルをそなえています。
クリスタルは、1990年にまず軸部前方にドッキング、翌日には、ミールの前方側面方向、クバントの反対側に固定されました。クリスタルは、科学研究用の機器や太陽電池パネルと発電システムに加えて、100tにも及ぶ重量との結合が可能なドッキング装置をそなえています。これはソ連版スペースシャトル−ブランとのドッキング用に開発されたものですが、1995年6月27日にはスペースシャトルとの初ドッキングに使われました。この時、クリスタルは、スペクトルの増設にともない、クバントと直角位置のポートに移動されていました。
ところが、そのままの位置ではスペースシャトルとミールがぶつかってしまうため、船外活動によって、クリスタルを一時的に軸部のドッキング・ポートに移す作業がおこなわれました。スペースシャトルとのドッキング後、クリスタルは、ソユーズやプログレスとのドッキング・スペースを確保するため、また、もとの位置にもどされました。この問題を解決するために増設されたのが、あとで解説するスペースシャトル・ミール用ドッキング・モジュールでした。クリスタルは最大直径4.35m、全長11.9m、総重量19.64トンで、与圧部容積60,8m3。2基、70m2の太陽発電パネルをそなえています。
スペクトルは1995年6月1日、まず軸部にドッキング後、側面方向、クバント1の反対側に固定されました。モジュールとしての主な用途は地球観測ミッションです。最大直径4.35m、全長12m、総重量19.64t、与圧部容積61.9m3。4基、35m2の太陽発電パネルをそなえています。
スペースシャトル・ミール用ドッキング・モジュールは、クリスタルを移動することなくスペースシャトルとドッキングできるようにするための、仲介役の延長装置で、ロシアで製造され、1997年11月、スペースシャトル・ミール2度目のドッキング・ミッションの際にスペースシャトルで運ばれ、クリスタルと結合、固定されました。ドッキング装置の向きを360度近く回転させることによって、スペースシャトルとの安全かつ信頼性の高いドッキングが可能となっています。直径2.2m、全長4.7m、総重量4.09tで、側面に2基の太陽電池が装備されています。
プリローダは、1996年4月、ミール本体最後の増設用ポートに固定されました。地球観測用のリモート・センシング機器が搭載され、最大直径4.35m、全長12m、総重量19tで、与圧部容積は66m3となっています。
プリローダの結合により、ミールに可能な基礎構造の増設は完了しましたが、以後も、太陽発電パネルの増設など、改良はさらにつづけられました。
2.宇宙でどんなことをして、今はどうなっているの?
コア部の軌道投入から13年以上の間、ミールはソ連崩壊に前後する政変にもかかわらず、国際的な協力のもと、本当の意味で恒久的なものとしては人類初の宇宙ステーションへと成長しました。来るべき国際宇宙ステーション計画実現へ向けての第1段階(フェイズ1)として、スペースシャトルを含む国際的な協力のもとでの運用がおこなわれています。
1999年8月28日、最後の3人の飛行士が帰還しミールは無人となりました。
3.この宇宙ステーションにのりこんだ宇宙飛行士は?
L・キジム、V・ソロビヨフ、Y・ロマネンコ、A・ラベイキン、A・ビクトレンコ、A・アレクサンドロフ、M・ファリス、V・チトフ、M・マナロフ、A・レフチェンコ、A・ソロビヨフ、V・サビヌイフ、V・リャホフ、V・ポリヤコフ、A・モフマンド、A・ウォルコフ、S・クリカレフ、J・クレチアン、A・セレブロフ、A・バランディン、G・マナコフ、G・ストレカロフ、V・アファナシェフ、M・マナロフ、秋山豊寛、A・アルツェバルスキ、H・シャーマン、T・アウバキロフ、F・フィーボック、A・カレリ、K・フレード、S・アブデエフ、M・トニーニ、A・ポリショック、V・スビリエフ、J・ピエール・ハグネア、Y・ウサチョフ、Y・マレンチェンコ、T・ムサバイエフ、E・コンダコワ、W・メルボルト、V・デジュロフ、N・サガード、R・ギブソン、チャールズ・プレコート、E・ベーカー、G・ハーバー、B・ダンバー、N・ダブリン、Y・ギゼンコ、S・アブデエフ、T・ライテル、K・キャメロン、ジェームズ・ハルセル、クリス・ハドフィールド、J・ロス、W・マッカーサー、Y・オヌフリエンコ、K・チルトン、リチャード・シーアフォス、R・セガ、M・クリフォード、L・ガットウィン、S・ルシッド、V・コルザン、C・デエー、ウィリアム・レディ、テレンス・ウィルカット、T・エーカーズ、J・ブラハ、J・アプト、C・ウォルツ、マイケル・ベーカー、B・ジェット、J・グランスフェルド、M・アイビンズ、P・ウィッソフ、J・リネンジャー、A・ラズートキン、V・ツィブリエフ、R・エワルト、アイリーン・コリンズ、J-F・クレルボア、E・ルー、C・ノリエガ、E・コンダコワ、M・フォーレ、P・ビノグラドフ、ジェームズ・ウエザビー、M・ブルームフィールド、S・バラジンスキー、J-L・クレティアン、D・ウルフ、T・ムサバイエフ、N・ブダーリン、L・エイハート、G・パダルカ、Y・バトューリンです。
4.どのように地球を回るの?
打ち上げ直後の軌道は、近地点高度387km、遠地点高度395km、軌道傾斜51.6度、公転周期92.4分で、大気の抵抗による高度低下を打ち消すため、搭載の小型ロケットやドッキング状態の無人宇宙船プログレスを使っての軌道修正が繰り返しおこなわれました。
MIR
出典: フリー百科事典『ウィキペディア(Wikipedia)』 (2013/06/03 13:25 UTC 版)
MIR
- 首都圏新都市鉄道 - つくばエクスプレスを運営している日本の鉄道会社の略称(Metropolitan Intercity Railway Company)
- Mir (ディスプレイサーバ) - カノニカルによって開発されているLinux用ディスプレイサーバ
 |
このページは曖昧さ回避のためのページです。一つの言葉や名前が二つ以上の意味や物に用いられている場合の水先案内のために、異なる用法を一覧にしてあります。お探しの用語に一番近い記事を選んで下さい。このページへリンクしているページを見つけたら、リンクを適切な項目に張り替えて下さい。 |
Mir (ディスプレイサーバ)
| 開発元 |
Mirプロジェクト Canonical Ltd. |
|---|---|
| 最新評価版 |
2.19.3
/ 2025年1月20日[1] |
| リポジトリ | |
| プログラミング 言語 | C++ |
| 対応OS | Linux |
| サポート状況 | 開発中 |
| 種別 | ディスプレイサーバ |
| ライセンス | GPLv3[2] |
| 公式サイト |
launchpad wiki |
Mirはカノニカルによって開発されているLinux用のディスプレイサーバである。
Ubuntuにおいて現在使用されているX Window Systemの置き換えが計画されていた[3][4][5]。
Mirは2013年3月4日にカノニカルによって発表された。MirはUnityユーザインタフェースの次世代であるUnity Next(Unity 8)の開発を可能にするために開発された[3]。しかし、2017年4月5日にマーク・シャトルワースはカノニカルによるUnity 8の開発を終了すると発表した[6]。Mirも開発終了が危ぶまれたが、3日後の8日マーク・シャトルワースはIoTアプリケーション向けに開発を継続していくことを明らかにした[7]。
2018年9月21日、バージョン1.0.0がリリースされた[8]。
論争
MirはUbuntuにおけるXの代替技術として2013年にカノニカルに選ばれたが、それより以前である2010年にはWaylandが使用されることが発表されていた[9]。Mirの発表後、影響を受ける同様のプロジェクトをリードする人間により反論や説明が行われ、いくつか記事が書かれた[10][11][12][13][14]。
脚注
- ^ “Mir in Launchpad”. Canonical Ltd.. 2025年2月17日閲覧。
- ^ “Mir:readme”. Ubuntu. 2013年6月9日閲覧。
- ^ a b “Mir/Spec – Ubuntu Wiki”. Wiki.ubuntu.com. 2013年3月6日閲覧。
- ^ “Canonical reveals plans to launch Mir display server – Update – The H Open: News and Features”. H-online.com (2013年2月24日). 2013年3月6日閲覧。
- ^ Brodkin, Jon (2012年5月17日). “Ubuntu dumps X window system, creates replacement for PC and mobile”. Ars Technica. 2013年3月6日閲覧。
- ^ “Growing Ubuntu for cloud and IoT, rather than phone and convergence” (2017年4月5日). 2017年10月1日閲覧。
- ^ Shuttleworth, Mark (2017年4月8日). “Unity8”. Google Plus. 2017年10月1日閲覧。
- ^ “Linux向けディスプレイサーバー「Mir 1.0.0」リリース”. OSDN Magazine (2018年9月25日). 2018年9月25日閲覧。
- ^ マーク・シャトルワース (2010年11月4日). “Unity on Wayland”. 2013年4月18日閲覧。 “The next major transition for Unity will be to deliver it on Wayland....”
- ^ Michael Larabel (2013年3月4日). “Upstream X/Wayland Developers Bash Canonical, Mir”. 2013年4月18日閲覧。 “'I'm just irritated that this means more work for us, more work for upstream developers, more work for toolkits, more work for hardware vendors....'”
- ^ Michael Larabel (2013年3月5日). “A Note To Canonical: "Don't Piss On Wayland"”. 2013年4月18日閲覧。
- ^ Martin Gräßlin, maintainer of KWin, the KDE window manager (2013年3月8日). “War is Peace”. 2013年4月18日閲覧。 “Will KWin support Mir? No!”
- ^ David Edmundson, author of KDE greeter library used by LightDM used by Ubuntu (2013年3月12日). “KDE, LightDM and the Mir Kerfuffle”. 2013年4月18日閲覧。 “If you know for 6 months that you're not going to do something you said you would it's rude not to tell people.”
- ^ Michael Larabel (2013年3月13日). “GNOME Will Move Full-Speed With Wayland Support”. 2013年4月18日閲覧。 “What's GNOME doing about Mir? They're laying out plans right now to move hard and fast with Wayland support!”
外部リンク
| 主要項目 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 人物 |
| ||||||||
| 派生品 |
| ||||||||
| ソフトウェア |
| ||||||||
| 技術と ユーザインタフェース |
| ||||||||
| ハードウェア |
| ||||||||
| サポート |
| ||||||||
| フォント | |||||||||
| メディア |
| ||||||||
| 関連 | |||||||||

Mir
出典: フリー百科事典『ウィキペディア(Wikipedia)』 (2022/06/15 18:46 UTC 版)
詳細は「Mir」を参照 Mirは、Ubuntuのディスプレイサーバーに採用されることを目的にCanonicalによって開発されたが、2017年にUbuntuのディスプレイサーバーはWaylandに変更された。Mirは、X11やWaylandに使われているものとは異なる、独自のMirディスプレイサーバープロトコルを使用するが、X11プロトコルもサポートする。 Mirの実装は、GPLv3でライセンスされたlibmir-serverとlibmir-clientのもとで利用することができる。
※この「Mir」の解説は、「ディスプレイサーバ」の解説の一部です。
「Mir」を含む「ディスプレイサーバ」の記事については、「ディスプレイサーバ」の概要を参照ください。
「mir」の例文・使い方・用例・文例
- Mirのページへのリンク


