Download as pdf or txt
You might also like
- Dynamics of Particles and Rigid Bodies - Rao Solutions ManualDocument271 pagesDynamics of Particles and Rigid Bodies - Rao Solutions ManualLane KirsteinNo ratings yet
- Solutions To VECTOR MECHANICS For ENGINEERS Statics 9th Ed. Ferdinand P. Beer, E. Russell Johnston Ch05Document196 pagesSolutions To VECTOR MECHANICS For ENGINEERS Statics 9th Ed. Ferdinand P. Beer, E. Russell Johnston Ch05abbas73% (11)
- Penrose, Roger - The Large, The Small, and The Human Mind (Cambridge, 1997)Document221 pagesPenrose, Roger - The Large, The Small, and The Human Mind (Cambridge, 1997)Kristian Kärrman100% (1)
- L02 - Vectors IDocument24 pagesL02 - Vectors IZohebCurrimbhoy0% (1)
- CallenDocument5 pagesCallenDiericon SousaNo ratings yet
- Vector Integration: Vector Analysis Dr. Mohammed Yousuf KamilDocument3 pagesVector Integration: Vector Analysis Dr. Mohammed Yousuf KamilSonu YadavNo ratings yet
- 6.1 Review: Differential Forms On RDocument31 pages6.1 Review: Differential Forms On RRdNo ratings yet
- MATH 8 Q3 Week 3Document3 pagesMATH 8 Q3 Week 3Janna Mae Edria DellosaNo ratings yet
- Physics 731 Lecture Notes 1Document57 pagesPhysics 731 Lecture Notes 1Yung-Ta SungNo ratings yet
- Guidugli - A Primer in ElasticityDocument105 pagesGuidugli - A Primer in ElasticityAscanio MarchionneNo ratings yet
- E-Infinity Coalgebra Structure On Chain ComplexesDocument5 pagesE-Infinity Coalgebra Structure On Chain ComplexesANo ratings yet
- Polytopes, Hopf Algebras and Quasi-Symmetric Functions: Victor M. Buchstaber Nickolai ErokhovetsDocument61 pagesPolytopes, Hopf Algebras and Quasi-Symmetric Functions: Victor M. Buchstaber Nickolai ErokhovetsCuisine GanNo ratings yet
- 2 Convenient Geometric InterpretationDocument15 pages2 Convenient Geometric InterpretationNagamani ArumugamNo ratings yet
- Topic 2Document23 pagesTopic 2joud.eljazzaziNo ratings yet
- Aq Ah: On A Theorem of Liouville Concerning Integrable Problems of DynamicsDocument5 pagesAq Ah: On A Theorem of Liouville Concerning Integrable Problems of DynamicsForgeLionNo ratings yet
- Lecture Notes of MAT203Document101 pagesLecture Notes of MAT203siddharthNo ratings yet
- P-Y Curves For Single Piles in Fine Soils From The Prebored Pressuremeter - A New ApproachDocument7 pagesP-Y Curves For Single Piles in Fine Soils From The Prebored Pressuremeter - A New ApproachSantiago OsorioNo ratings yet
- Equations MechanicsDocument23 pagesEquations Mechanicsmgrsujan820No ratings yet
- N Assica. Quantum: Ana. C. ZaniesDocument5 pagesN Assica. Quantum: Ana. C. ZaniescdcrossroaderNo ratings yet
- The Pohozaev-Type Inequalities and Their Applications For A Kind of Elliptic Equation (System)Document17 pagesThe Pohozaev-Type Inequalities and Their Applications For A Kind of Elliptic Equation (System)andersongonzaga25yahoo.com.brNo ratings yet
- Mathematics 09 01890Document15 pagesMathematics 09 01890jandersen6169No ratings yet
- BLUE Properties of OLS Estimators and Gauss MarkovDocument9 pagesBLUE Properties of OLS Estimators and Gauss MarkovNashit AhmedNo ratings yet
- Experiment Data of Mos and PNDocument17 pagesExperiment Data of Mos and PNrrahuldalal10No ratings yet
- BOOK-1 - Mastering CAM - CAD by Ibrahim ZeidDocument187 pagesBOOK-1 - Mastering CAM - CAD by Ibrahim Zeidtherashijain16No ratings yet
- A Simple Geometrical Construction of Deformation QuantizationDocument26 pagesA Simple Geometrical Construction of Deformation QuantizationspanishramNo ratings yet
- Dual SpaceDocument27 pagesDual SpaceWenyi GuoNo ratings yet
- Combine PDFDocument2 pagesCombine PDFVikram KumarNo ratings yet
- SM-Virtual Work - New07Document50 pagesSM-Virtual Work - New07dome.sukprasertNo ratings yet
- The Yang-Mills Equations: Patrícia Ewald July 9, 2019Document9 pagesThe Yang-Mills Equations: Patrícia Ewald July 9, 2019cifarha venantNo ratings yet
- Dual SpaceDocument17 pagesDual SpaceAbhinaba MannaNo ratings yet
- Vector AlgebraDocument38 pagesVector AlgebraAditya PandeyNo ratings yet
- Theta PDFDocument4 pagesTheta PDFhelmantico1970No ratings yet
- Modular Forms DicksonDocument18 pagesModular Forms DicksonEmmanurevaNo ratings yet
- Objectives To Find Compositions of Isometries, Including Glide ReflectionsDocument7 pagesObjectives To Find Compositions of Isometries, Including Glide ReflectionsAbood SafadiNo ratings yet
- JEE-Physics: 1 V 1 R 1 V V R 1 2R M 1Document12 pagesJEE-Physics: 1 V 1 R 1 V V R 1 2R M 1sagar panchalNo ratings yet
- 02 Ray Theory Part2Document24 pages02 Ray Theory Part2Saurabh KumarNo ratings yet
- Chapter HandoutDocument5 pagesChapter HandoutAbhichet JeemsantiaNo ratings yet
- 02 Position and OrientationDocument50 pages02 Position and Orientation穆林No ratings yet
- Differential GeometryDocument17 pagesDifferential GeometryAshwin BNo ratings yet
- An Introduction To Ramanujan GraphsDocument17 pagesAn Introduction To Ramanujan GraphsSayed Imran Ur Rahman (Abid)No ratings yet
- L14 SVDDocument8 pagesL14 SVDJaime Andres Aranguren CardonaNo ratings yet
- Sample Problem 1/1 Sample Problem 1/3: SolutionDocument16 pagesSample Problem 1/1 Sample Problem 1/3: Solution22021530No ratings yet
- CE50100 - Assignment 1Document2 pagesCE50100 - Assignment 12006 A.SaikumarNo ratings yet
- QFT - 1 - Relativistic Quantum MechanicsDocument7 pagesQFT - 1 - Relativistic Quantum MechanicsAlisterNo ratings yet
- MinpolyandappnsDocument14 pagesMinpolyandappnsMahimaNo ratings yet
- 1 Tensor Products: Lecture 2: Quantum AlgorithmsDocument9 pages1 Tensor Products: Lecture 2: Quantum AlgorithmsABCDNo ratings yet
- De Rham Cohomology and A Variational Principle: Why Electromagnetism Is Mathematically TrivialDocument8 pagesDe Rham Cohomology and A Variational Principle: Why Electromagnetism Is Mathematically TrivialQuinton WestrichNo ratings yet
- Assignment 1 PDFDocument3 pagesAssignment 1 PDFsarangaNo ratings yet
- 5 Product of VectorsDocument26 pages5 Product of VectorsanuragthumalapallyNo ratings yet
- Jacobians-Differential KinematicsDocument62 pagesJacobians-Differential KinematicsChay Tick FeiNo ratings yet
- M1 2019 Vector Lines Notes For SLSDocument26 pagesM1 2019 Vector Lines Notes For SLScoyite8695No ratings yet
- Lecture 3: Change of Basis and Matrix Representation - . .: I N 1 I N 1 MDocument5 pagesLecture 3: Change of Basis and Matrix Representation - . .: I N 1 I N 1 MBabiiMuffinkNo ratings yet
- S SRT: 2.1 Inner Product or Dot Product of Two VectorsDocument7 pagesS SRT: 2.1 Inner Product or Dot Product of Two VectorsJaved RizviNo ratings yet
- Geometric Algebra: A Computational Framework For Geometrical ApplicationsDocument10 pagesGeometric Algebra: A Computational Framework For Geometrical ApplicationsJames ChapelNo ratings yet
- Singular Value Decomposition and Polar FormDocument24 pagesSingular Value Decomposition and Polar FormmaxxagainNo ratings yet
- Statics Chapter 4Document11 pagesStatics Chapter 4aniceto labianNo ratings yet
- 2-2 SemDocument10 pages2-2 SemVIVEK VIKKYNo ratings yet
- Summary (Preliminaries)Document16 pagesSummary (Preliminaries)Beyzanur BektaşNo ratings yet
- Relative Resource ManagerDocument9 pagesRelative Resource ManagerPant EaNo ratings yet
- Geometry of Gauge Fields: Michal Kosztolowicz June 15, 2010Document5 pagesGeometry of Gauge Fields: Michal Kosztolowicz June 15, 2010cifarha venantNo ratings yet
- (Babich, M) On Birational Darboux Coordinates OnDocument15 pages(Babich, M) On Birational Darboux Coordinates OnWinona SaniyaNo ratings yet
- Numerical Integration Stiffness Irons 66Document3 pagesNumerical Integration Stiffness Irons 66Felipe GarciaNo ratings yet
- Btech 1st Sem: Maths: Vector Algebra and Vector CalculusDocument7 pagesBtech 1st Sem: Maths: Vector Algebra and Vector CalculusTechno India GroupNo ratings yet
- Helmholtz DecompositionDocument5 pagesHelmholtz DecompositionMike AlexNo ratings yet
- Appointment - French Consulate, Erbil - IraqDocument1 pageAppointment - French Consulate, Erbil - IraqMike AlexNo ratings yet
- 842 PDFDocument34 pages842 PDFMike AlexNo ratings yet
- Important NotesDocument26 pagesImportant NotesMike AlexNo ratings yet
- Nieliniowa Optyka Molekularna: by Stanisław KielichDocument38 pagesNieliniowa Optyka Molekularna: by Stanisław KielichMike AlexNo ratings yet
- Perm RepsDocument11 pagesPerm RepsMike AlexNo ratings yet
- Details of Some Representation Spaces For (3) : I A A A ADocument15 pagesDetails of Some Representation Spaces For (3) : I A A A AMike AlexNo ratings yet
- SU (3) Notes PDFDocument31 pagesSU (3) Notes PDFMike AlexNo ratings yet
- Units PDFDocument2 pagesUnits PDFMike AlexNo ratings yet
- Wagner ThesisDocument19 pagesWagner ThesisMike AlexNo ratings yet
- Hadron App 3Document8 pagesHadron App 3Mike AlexNo ratings yet
- Introduction To Connections On Principal Fibre Bundles: by Rupert WayDocument12 pagesIntroduction To Connections On Principal Fibre Bundles: by Rupert WayMike AlexNo ratings yet
- Some Notes On Young Tableaux As Useful For Irreps of Su (N)Document15 pagesSome Notes On Young Tableaux As Useful For Irreps of Su (N)Mike AlexNo ratings yet
- Dirac Operator On The Riemann Sphere: ITEP, B. Cheremushkinskaya 25, 117 259, Moscow, RussiaDocument18 pagesDirac Operator On The Riemann Sphere: ITEP, B. Cheremushkinskaya 25, 117 259, Moscow, RussiaMike AlexNo ratings yet
- Spheres and Ehresmann ConnectionDocument55 pagesSpheres and Ehresmann ConnectionMike AlexNo ratings yet
- Bouweamp: MathematicsDocument5 pagesBouweamp: MathematicsMike AlexNo ratings yet
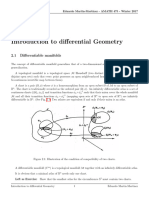
- 2 Introduction To Riemannian Geometry: - A Manifold Is The Least Structure ThatDocument13 pages2 Introduction To Riemannian Geometry: - A Manifold Is The Least Structure ThatMike AlexNo ratings yet
- Basic Multivector CalculusDocument6 pagesBasic Multivector CalculusMike AlexNo ratings yet
- Angular Momentum and Rotations: Classical Mechanics HomeworkDocument2 pagesAngular Momentum and Rotations: Classical Mechanics HomeworkplfratarNo ratings yet
- Photoelectric Effect: Day Thirty TwoDocument9 pagesPhotoelectric Effect: Day Thirty TwoPrayas RaneNo ratings yet
- Playing Catch On A Merry Go RoundDocument3 pagesPlaying Catch On A Merry Go RoundJoseph StanovskyNo ratings yet
- Slide Set - 2 (Two)Document183 pagesSlide Set - 2 (Two)mandalsuman20092001No ratings yet
- VectorDocument4 pagesVectorShreyasNo ratings yet
- Indicial 2Document6 pagesIndicial 2Steph BredenhannNo ratings yet
- Electronic Structure of Atoms - General ChemistryDocument92 pagesElectronic Structure of Atoms - General ChemistryDuc Anh NguyenNo ratings yet
- Application of Geometry of MatrixDocument3 pagesApplication of Geometry of MatrixHuzaifaNo ratings yet
- SLP PDFDocument8 pagesSLP PDFSamima SabnamNo ratings yet
- PHY5 B07 Quantum MechanicsDocument2 pagesPHY5 B07 Quantum MechanicsLakshmi E. SNo ratings yet
- Crystal17 PDFDocument461 pagesCrystal17 PDFYhomn AcerNo ratings yet
- Stability LinearizationDocument5 pagesStability LinearizationDiego BastidasNo ratings yet
- Thermal Physics Part 1: Steve BramwellDocument44 pagesThermal Physics Part 1: Steve BramwellRoy VeseyNo ratings yet
- Ward-Takahashi IdentityDocument2 pagesWard-Takahashi Identityrr1819No ratings yet
- Exercises For 8.5Document17 pagesExercises For 8.5docs docsNo ratings yet
- IntroductionLQG PDFDocument277 pagesIntroductionLQG PDFLuisSanabriaNo ratings yet
- Nptel: Quantum Mechanics I - Video CourseDocument2 pagesNptel: Quantum Mechanics I - Video CourseAmandeep GargNo ratings yet
- 04 01 Product of Vectors1Document58 pages04 01 Product of Vectors1Sri DNo ratings yet
- Arihant Integral CalculusDocument82 pagesArihant Integral CalculusAbhi100% (1)
- Continuous Dynamical Systems (1996) (127s) - Hall, Lee.Document127 pagesContinuous Dynamical Systems (1996) (127s) - Hall, Lee.Anonymous DgWkoyXPANo ratings yet
- L 15Document18 pagesL 15shivam007No ratings yet
- Lecture 6 Notes, Electromagnetic Theory I: 1. Associated Legendre PolynomialsDocument14 pagesLecture 6 Notes, Electromagnetic Theory I: 1. Associated Legendre PolynomialsMuzamil ShahNo ratings yet
- q3 Week 4 Stem g11 Basic CalculusDocument12 pagesq3 Week 4 Stem g11 Basic CalculusAngelicGamer PlaysNo ratings yet
- André Marie AmpèreDocument3 pagesAndré Marie AmpèreGaldinoNo ratings yet
- Presentation TeccaDocument69 pagesPresentation TeccaKhmer ChamNo ratings yet