Vectors
Vectors
Download as pdf or txt
You might also like
- 1970 Zwiebach Part1Document143 pages1970 Zwiebach Part1Ben Schmitz100% (1)
- Amca 99Document85 pagesAmca 99simonlia100% (5)
- Scalar and VectorDocument51 pagesScalar and Vectorepah_05No ratings yet
- Vector 1Document31 pagesVector 1adnan.iftiNo ratings yet
- Scalar and VectorsDocument32 pagesScalar and VectorsMuhammad AfzalNo ratings yet
- Lecture 2Document30 pagesLecture 2keroa5633No ratings yet
- Tipos de Magnitudes Físicas: Magnitud Escalar: Definida Mediante Un Número yDocument20 pagesTipos de Magnitudes Físicas: Magnitud Escalar: Definida Mediante Un Número yjaviNo ratings yet
- UntitledDocument45 pagesUntitledLAVANYA MOLLETINo ratings yet
- Chapter 3Document22 pagesChapter 3Tongpin PengNo ratings yet
- ST 2Document11 pagesST 2yyNo ratings yet
- Vector Addition 1Document26 pagesVector Addition 1R P SinghNo ratings yet
- Vector 2Document48 pagesVector 2adnan.iftiNo ratings yet
- Lecture Notes 2 - Vectors1Document4 pagesLecture Notes 2 - Vectors1JezManuel04No ratings yet
- Chapter 1 _ Review of Vector CalculusDocument25 pagesChapter 1 _ Review of Vector Calculuseminetu.kajidakiNo ratings yet
- Chapter 1 VectorsDocument9 pagesChapter 1 VectorsSohail KhiljiNo ratings yet
- VectorDocument37 pagesVectorElsabeth MitikuNo ratings yet
- Physics OriginalDocument11 pagesPhysics OriginalAdewale Peter OlowatosinNo ratings yet
- 1 Vectors: 1.1 Scalars and Vectors (Riley 7.1)Document11 pages1 Vectors: 1.1 Scalars and Vectors (Riley 7.1)Roy VeseyNo ratings yet
- Privatisation of Indian Railways.Document34 pagesPrivatisation of Indian Railways.Aniket BabutaNo ratings yet
- Emags Study GuideDocument40 pagesEmags Study GuidePatrick Joshua GlimadaNo ratings yet
- To Word 10-18-2024 09.54Document36 pagesTo Word 10-18-2024 09.54ngaruiyasamuel374No ratings yet
- EC8451 Unit IDocument19 pagesEC8451 Unit INagai KumaresanNo ratings yet
- 1008 Topper 21 101 3 4 123 Motion in A Plane Up201607211457 1469093260 6638Document16 pages1008 Topper 21 101 3 4 123 Motion in A Plane Up201607211457 1469093260 6638sadhu associatesNo ratings yet
- FSC I Short Que Chapter 2Document5 pagesFSC I Short Que Chapter 2Voice of People جمہور کی آوازNo ratings yet
- Vector Algebra: CLASS-12 Theory and ExercisesDocument36 pagesVector Algebra: CLASS-12 Theory and ExercisesMiten Gandhi100% (1)
- Chapter-2 Vector AnalysisDocument7 pagesChapter-2 Vector AnalysisAnkit Kumar MittalNo ratings yet
- Vectors v02Document18 pagesVectors v02Stephanie Anne FortinNo ratings yet
- 02 Force Systems 3DDocument35 pages02 Force Systems 3DNasik AmimNo ratings yet
- Slides 07 - Review of Vector RelationsDocument19 pagesSlides 07 - Review of Vector RelationsIbrahim Abd El MoettiNo ratings yet
- VectorsDocument28 pagesVectorsChill Kwong100% (1)
- 1.mathematical PhysicsDocument33 pages1.mathematical PhysicsSk SajedulNo ratings yet
- Lecture1 HandoutDocument12 pagesLecture1 HandoutTriết MinhNo ratings yet
- 23SELF THEORY-Vector Algebra FinalDocument8 pages23SELF THEORY-Vector Algebra Finalرافت باصهيNo ratings yet
- PHY 121 Lecture 1Document5 pagesPHY 121 Lecture 1Jerry Jabian LanticseNo ratings yet
- Some Background Mathematical Concepts You Should Know: MagnitudeDocument9 pagesSome Background Mathematical Concepts You Should Know: MagnitudeNoviaNo ratings yet
- Vectors BookDocument11 pagesVectors Bookscripmeup007No ratings yet
- Phy110note 3Document59 pagesPhy110note 3thizalusale550No ratings yet
- ElectroMagnetics Chapter1 Vector Algebra - 1682470169Document25 pagesElectroMagnetics Chapter1 Vector Algebra - 1682470169ericek0001No ratings yet
- CH 3Document20 pagesCH 3almrhby582No ratings yet
- CH 5 Kerja Dan EnergiDocument21 pagesCH 5 Kerja Dan EnergiDey TandirerungNo ratings yet
- Vectors IntermediateDocument40 pagesVectors IntermediateGopinathNo ratings yet
- Ec8451 Emf Lecture NotesDocument61 pagesEc8451 Emf Lecture NotesNarenthra BaalaNo ratings yet
- U Iq K2 Ib LIn WCBVDD DZX 0Document39 pagesU Iq K2 Ib LIn WCBVDD DZX 0swarnikakashyap26No ratings yet
- Cartesian Coordinate System and VectorsDocument24 pagesCartesian Coordinate System and VectorsAndrey CabezasNo ratings yet
- Unit Vectors: I Has Magnitude Iis J Is The Y-Component Vector of KistheDocument5 pagesUnit Vectors: I Has Magnitude Iis J Is The Y-Component Vector of KistheJam Uly GastyNo ratings yet
- Electromagnetics-and-Vector-AnalysisDocument7 pagesElectromagnetics-and-Vector-Analysisjheianpogi30No ratings yet
- VECTORSDocument9 pagesVECTORSINFERNO BLASENo ratings yet
- PHY568-Lec-3-Vector AlgebraDocument31 pagesPHY568-Lec-3-Vector AlgebrazulhaimirasheedNo ratings yet
- Chapter+3 VectorsDocument36 pagesChapter+3 VectorsRazan AlmuairfiNo ratings yet
- Chapter 3 VectorsDocument20 pagesChapter 3 Vectorsa.a.ab14442No ratings yet
- Markus Zahn SolucionaryDocument381 pagesMarkus Zahn SolucionaryVillarroel Claros MichaelNo ratings yet
- Chapter 3-PHY1101-2024Document24 pagesChapter 3-PHY1101-2024bestsyouxNo ratings yet
- Presentation of AlgebraDocument15 pagesPresentation of AlgebraBIRUNGI CHANCE YOSIANo ratings yet
- Vector RevisionDocument7 pagesVector RevisionSumaya Akter Ruhi 2022610642No ratings yet
- Ch03Document11 pagesCh03legiaanh12No ratings yet
- Lecture Notes - Week 1Document31 pagesLecture Notes - Week 1Nawin RaNo ratings yet
- Unit 1 VectorsDocument40 pagesUnit 1 VectorsVimala ElumalaiNo ratings yet
- Chapter 3 (Original)Document23 pagesChapter 3 (Original)Mohammad SadiqNo ratings yet
- 01 Vectors MatricesDocument48 pages01 Vectors MatricesMahmoud AbdelazizNo ratings yet
- Electromagnetic Wave 5th SemDocument21 pagesElectromagnetic Wave 5th SemSoumyajit PaulNo ratings yet
- Review - of - vectors-Griffiths-Introduction To Electrodynamics (2017)Document9 pagesReview - of - vectors-Griffiths-Introduction To Electrodynamics (2017)Bipanjit SinghNo ratings yet
- Topic 7.1 - Discrete Energy and Radioactivity Formative Assessment NAMEDocument2 pagesTopic 7.1 - Discrete Energy and Radioactivity Formative Assessment NAMEGajendraNo ratings yet
- 2019 PHY 2 CLC BTapDocument15 pages2019 PHY 2 CLC BTapzuuuNo ratings yet
- Fluid Mechanics PDFDocument336 pagesFluid Mechanics PDFVinay V GowdaNo ratings yet
- VI: Asphalt Mixture Volumetrics: Component DiagramDocument13 pagesVI: Asphalt Mixture Volumetrics: Component Diagramsekarmayang28No ratings yet
- Class 9 NCERT Solutions GravitationDocument17 pagesClass 9 NCERT Solutions GravitationAnonymous VZREavNo ratings yet
- Problems in Heat ConductionDocument32 pagesProblems in Heat ConductionistopiNo ratings yet
- Organic ChemistryDocument3 pagesOrganic ChemistryRohit 14No ratings yet
- Spectral Line ShapeDocument4 pagesSpectral Line ShapeLeo HuangNo ratings yet
- Fluids ManualDocument10 pagesFluids ManualAngela Dimaano SaladaNo ratings yet
- Eco3 1ln4Document5 pagesEco3 1ln4Miguel HerediaNo ratings yet
- Detect Soft Foot With Vibration AnalysisDocument4 pagesDetect Soft Foot With Vibration AnalysisJaime BerryNo ratings yet
- Physics 19Document20 pagesPhysics 19Kazuto ShibaNo ratings yet
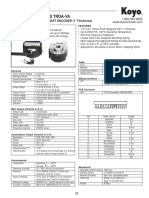
- Encoder Incremental KoyoDocument3 pagesEncoder Incremental KoyovisypatyNo ratings yet
- Engineering Physics (BT-201) B.Tech. I Year CO - 01 Unit I - Quantum PhysicsDocument39 pagesEngineering Physics (BT-201) B.Tech. I Year CO - 01 Unit I - Quantum PhysicsAbhishek ThakralNo ratings yet
- Bioinorganic ChemistryDocument11 pagesBioinorganic ChemistryWwJd HeavenNo ratings yet
- (P-51) Motion of Electon in Magnetic FieldDocument1 page(P-51) Motion of Electon in Magnetic FieldBhushan KokardeNo ratings yet
- Kineticsss Notes PDFDocument73 pagesKineticsss Notes PDFArun SharmaNo ratings yet
- PolarizabilityDocument9 pagesPolarizabilityFabioNo ratings yet
- Development Trends in Kraft PulpingDocument56 pagesDevelopment Trends in Kraft PulpingNaveenGoyal100% (1)
- Schrodinger Equation DerivationDocument12 pagesSchrodinger Equation DerivationAndrés López Martínez100% (1)
- GR BasisDocument27 pagesGR BasisGustavo ArciniegaNo ratings yet
- Me217strength of Materials L T P CDocument2 pagesMe217strength of Materials L T P ClogicvirusNo ratings yet
- 2186Document144 pages2186Mohamed ShafeyNo ratings yet
- Ix Visto-2 M.T-1 23-24Document7 pagesIx Visto-2 M.T-1 23-24pranavsugan31No ratings yet
- Gold Extraction From ThioureaDocument7 pagesGold Extraction From ThioureaRavi ChandraNo ratings yet
- Spinning Speeds and TPDDocument16 pagesSpinning Speeds and TPDVASANHF1No ratings yet
- Transmission Line DesignDocument20 pagesTransmission Line DesignrdshsthaNo ratings yet
- 10.1007 - s11694 017 9573 7Document10 pages10.1007 - s11694 017 9573 7Juan MartínezNo ratings yet